











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. Introducción
El diseño experimental juega un papel importante en las investigaciones científicas teóricas y aplicadas. Los estadísticos han desarrollado la teoría del diseño óptimo para generar experimentos que tienen propiedades estadísticas óptimas deseables. Un experimento óptimo se diseña para responder a algún criterio de optimalidad que se establece tratando de alcanzar la inferencia estadística más precisa posible con el mínimo coste. Numerosos criterios han sido desarrollados para medir el rendimiento de un diseño experimental. El criterio más conocido y ampliamente utilizado es el criterio D-optimalidad, que permite reducir al mínimo la varianza generalizada de los estimadores, proporcionando la estimación más precisa de los parámetros del modelo.
Sin embargo, esa teoría del diseño óptimo puede producir diseños inadecuados desde una perspectiva práctica. Por ejemplo, Atkinson, Donev y Tobias (2007) demostraron que en el caso del modelo de decaimiento exponencial el diseño D-óptimo resultante indica que todos los experimentos se deben realizar en un sólo punto, lo cual es inadmisible para el investigador primario. También, hay algunos diseños experimentales óptimos que asignan sólo una observación a un punto de diseño, con lo cual no se puede estimar la variabilidad dentro de este grupo. Aunque todos estos diseños son estadísticamente óptimos de acuerdo con sus respectivos criterios de diseño, es posible que entren en conflicto con prácticas de laboratorio común u otras directrices establecidas.
Como una alternativa para superar esta falla Parker (2005) propuso una técnica que utiliza criterios de diseño penalizado, que permite a un investigador incorporar características experimentales deseables en un criterio de diseño óptimo ajustado. Dicha técnica sugiere penalizar los diseños óptimos mediante el uso de funciones de deseabilidad. El diseño óptimo penalizado resultante es óptimo no solo de acuerdo al criterio de diseño estadísticamente óptimo, sino también a las preferencias prácticas impuestas por el investigador.
En este trabajo se presenta un procedimiento que permite encontrar un diseño óptimo local penalizado para modelos no lineales. La información básica sobre las funciones de deseabilidad y diseños óptimos para modelos no lineales se proporciona en las secciones 2 y 3 respectivamente. La sección 4 se resume la metodología de Parker (2005) y se dan las pautas generales para la elección de las funciones de deseabilidad para obtener diseños óptimos penalizados. Un ejemplo del modelo no lineal de Michaelis-Menten que ilustra esta técnica se proporciona en la sección 5.
2. Métodos y materiales
2.1 Funciones de deseabilidad
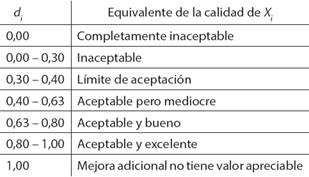
Harrington (1965) desarrolla el concepto de una función de deseabilidad como una solución para combinar las respuestas de múltiples factores en una función. Las respuestas de cada factor, X i , i = 1,2, ... , k, se transforman en una medida ordinal adimensional di , donde 0 ≤ d i ≤ 1. Un valor de 0 designa la respuesta como indeseable y un valor de 1 indica una respuesta deseable. En la Tabla 1 se presenta un resumen abreviado para la transformación de los niveles de Xi a la escala de deseabilidad.
TABLA 1 VERSIÓN ABREVIADA DE LAS DIRECTRICES DE HARRINGTON PARA LA TRANSFORMACIÓN DE LOS NIVELES DE X i , A LA ESCALA DE DESEABILIDAD
La forma de la función de deseabilidad depende de si el objetivo de investigación es maximizar o minimizar la respuesta, o limitar el rango de sus valores. Harrington (1965) usa la media geométrica de las funciones de deseabilidad individuales para representar la deseabilidad total de los factores combinados:

Definiendo la función de deseabilidad total como la media geométrica, Harrington (1965) transforma el problema de optimización multivariable en un problema de maximización univariado. Este enfoque evita los niveles inaceptables de factores, incluso en el caso de un solo factor, dado que la media geométrica es muy sensible para los di pequeños.
Derringer y Suich (1980) extienden la metodología de Harrington al definir las funciones de deseabilidad continuas por tramos. Estas funciones son flexibles y sus parámetros de forma pueden ser especificados por el usuario. Como una extensión de la deseabilidad total Derringer (1994) propone utilizar una media geométrica ponderada, de modo que cada función de deseabilidad individual puede tener un nivel de importancia diferente.
Gibb (1998) profundiza la metodología de la función de deseabilidad, tratando de solucionar el problema de no diferenciabilidad de estas funciones definidas por Derringer y Suich (1980). El incluye las funciones de deseabilidad que son continuas y diferenciables. Gibb propone la densidad normal y la función de distribución acumulativa logística como candidatas razonables para las funciones de deseabilidad.
El uso de las funciones de deseabilidad ha sido ampliamente adoptado en la industria manufacturera, aunque no es común en la literatura estadística. De hecho, ese es el método más popular para analizar simultáneamente varios factores en la optimización de calidad del producto.
2.2 Diseños óptimos para modelos no lineales
Se supone que los resultados de las mediciones son descritas mediante el modelo de regresión:

donde los x
i
son puntos (no necesariamente diferentes) en los cuales se realizan las mediciones, ε
i
son variables aleatorias independientes, distribuidas normalmente con  son parámetros desconocidos y η(x
i
; θ) es una función no lineal en θ.
son parámetros desconocidos y η(x
i
; θ) es una función no lineal en θ.
La matriz asintótica de varianzas-covarianzas de  , el estimador de mínimos cuadrados no lineales del vector de parámetros θ, está dada por
, el estimador de mínimos cuadrados no lineales del vector de parámetros θ, está dada por  , donde F es la matriz de las primeras derivadas parciales del modelo con respecto a θ definida así
, donde F es la matriz de las primeras derivadas parciales del modelo con respecto a θ definida así
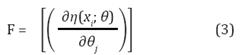
para i = 1,2, ... , N observaciones y j = 1,2, ... , p parámetros del modelo.
Se requiere estimar los parámetros desconocidos θ de la función de regresión no lineal η(x; θ) dada en el modelo (2), con fin de lograr mejores estimaciones sin tener para ello que incrementar los costos. Así, surge el diseño óptimo de experimentos que busca determinar las condiciones experimentales xi óptimas y el número de réplicas ni que deben tomarse bajo cada una de estas condiciones, que permitan obtener mayor precisión en la respuesta y mejores estimaciones a un menor costo. Una forma de hacerlo es a partir de la maximización o minimización de un funcional adecuado de la matriz de varianzas-covarianzas del vector de parámetros estimado. Estos funcionales se conocen como criterios de optimalidad y pueden ser vistos como una función de la matriz F, dada en (3), y se define como una función, Φ(x, w; η(θ), n, N), de los puntos de diseño, sus pesos, el modelo, el número de puntos de diseño, y el tamaño total de la muestra. El diseño experimental óptimo se encuentra al minimizar (o maximizar) la función Φ(x, w; η(θ), n, N) con respecto a los puntos de diseño y sus pesos en la región de diseño. El analista debe especificar n, N y la forma del modelo con los valores de los parámetros θ.
Se considera un diseño D-óptimo como aquel que minimiza la varianza generalizada de los parámetros estimados del modelo. El criterio de D-optimalidad es la función:

Dado que el criterio es no lineal con respecto a los puntos de diseño y sus pesos, se usa un algoritmo iterativo para la minimización. Teniendo en cuenta la discontinuidad de algunas de las funciones de deseabilidad, el algoritmo de minimización que se utiliza en este caso es el algoritmo de búsqueda directa de Nelder-Mead (Nelder y Mead (1965)), que es uno de los algoritmos más conocidos para optimización multidimensional sin derivadas y puede utilizarse para problemas con funciones discontinuas, que aparecen con frecuencia en la estadística aplicada.
2.3 Diseños óptimos penalizados
2.3.1 Criterio de optimalidad penalizado
Parker y Gennings (2008) proponen combinar las funciones de deseabilidad y la teoría del diseño óptimo. La función  se denomina la función de penalización, donde un valor de 1 indica un diseño experimental con propiedades indeseables. La función de penalización
se denomina la función de penalización, donde un valor de 1 indica un diseño experimental con propiedades indeseables. La función de penalización  se adiciona al criterio de diseño Φ(x, w; η(θ), n, N) para penalizar a los diseños experimentales.
se adiciona al criterio de diseño Φ(x, w; η(θ), n, N) para penalizar a los diseños experimentales.
El nuevo criterio

se minimiza con respecto a x y w para un valor dado de Λ, donde Λ es una constante especificada por el usuario necesaria para colocar las funciones Φ(x, w; η(θ), n, N) y 1 - D(x;w) en escalas similares y controlar el peso de la penalidad. Un algoritmo iterativo, el algoritmo de búsqueda directa de NelderMead, se utiliza para encontrar los diseños óptimos penalizados al minimizar el criterio (5) para un valor dado de Λ.
A continuación se detallan los pasos a seguir para obtener el diseño D-óptimo penalizado.
El valor inicial de Λ se elige como el mínimo del criterio de D-optimalidad (4) Λ0 = minΦ(x, w; η(θ), n, N).
Los diseños D-óptimos penalizados se generan minimizando el criterio (5) para valores de Λ en múltiplos de Λ0 = minΦ(x, w; η(θ), n, N).
Las respuestas de la deseabilidad total D y la varianza de los parámetros estimados Var(
 )se grafican en función de los valores múltiplos de Λ0 para observar su comportamiento.
)se grafican en función de los valores múltiplos de Λ0 para observar su comportamiento.El valor final de Λ se elige en el intervalo donde la gráfica muestra la estabilidad (no variación) de la función de deseabilidad total D.
El diseño óptimo penalizado final es definido por los valores de x y w asociados con el valor mínimo del criterio óptimo penalizado (5) para un valor de Λ encontrado en el paso 4.
El diseño óptimo penalizado resultante es óptimo de acuerdo con el criterio de diseño estadísticamente óptimo y con las preferencias prácticas impuestas por un investigador. El ejemplo del modelo de Michaelis-Menten ilustrará el procedimiento mencionado.
2.3.2. Procedimiento para la elección de las funciones de deseabilidad
El criterio de optimalidad penalizado se basa en funciones de deseabilidad, que se usan para captar las preferencias de un investigador en el diseño experimental. La cantidad de las funciones de deseabilidad individuales las determina el usuario, dependiendo del número de restricciones que se quiere aplicar sobre el diseño. A continuación se darán indicaciones generales a tener en cuenta en la elección de las funciones de deseabilidad adecuadas dependiendo de la restricción que se desee imponer al diseño.
Al comienzo se analiza el diseño óptimo no penalizado y se determinan que características no son adecuadas desde un punto de vista práctico u otras directrices establecidas. Por ejemplo, si el diseño óptimo no tiene grupo de control y la directriz exige tenerlo, entonces al diseño óptimo se le adiciona el punto de control para cumplir con los requisitos impuestos. Además, este grupo debe tener un tamaño adecuado para poder estimar la variabilidad dentro de él. El siguiente paso comprende incluir la restricción relacionada con el tamaño del grupo, definiendo el mínimo y el máximo permitidos de observaciones por realizar dentro de este grupo. El valor de la potencia en la transformación (6) propuesta por Derringer y Suich (1980) también se especifica por el usuario.

Si el usuario desea que el número de réplicas aumente rápidamente por encima del valor mínimo permitido debe elegir una potencia grande, en caso contrario, opta por un valor pequeño de ésta. Reemplazando estos valores en las fórmulas descritas en Derringer y Suich (1980), se obtiene la expresión explícita para la función de deseabilidad que controla el tamaño del grupo de control. Un procedimiento análogo se puede realizar para cualquier otro grupo donde se desea imponer el mismo tipo de restricción.
Si lo inconveniente del diseño óptimo está relacionado con el rango de experimentación, se puede utilizar diferentes tipos de funciones de deseabilidad descritas en Harrington (1965), en Derringer y Suich (1980) y también en Gibb (1998), mencionadas más adelante. Primero, se definen cuales valores de x son deseables y cuales no son. Si los valores grandes de x son indeseables se elige una función decreciente, si los valores pequeños son indeseables, se elige una función creciente. Si no son deseables tanto valores pequeños como grandes de x, entonces la función de deseabilidad tiene forma de una campana (no necesariamente simétrica). En forma análoga del caso anterior los valores máximo y mínimo permitidos de x ayudan a definir las expresiones analíticas de las funciones de deseabilidad.
En muchos casos el valor máximo de x del diseño óptimo se encuentra fuera de la región de experimentación. Una forma especial de la curva de crecimiento de Gompertz

descrita por Harrington (1965), puede usarse para este tipo de restricción. Las constantes a y b se especifican de tal modo que d = 1/e en el límite de la especificación y la pendiente refleja la velocidad a la que la calidad de x se ve afectada por el nivel de la respuesta.
Otro inconveniente puede estar relacionado con el espaciamiento de los puntos de diseño. Las restricciones de precisión en el método de medición implican la mínima separación aceptable entre los grupos contiguos de experimentación, lo que conduce a incluir una función de deseabilidad que controla la mínima distancia permitida entre los puntos de diseño adyacentes. En este caso los valores pequeños de la característica de interés son indeseables, por lo tanto se elige una función creciente. Una función logística puede ser útil para especificar esta función de deseabilidad, aunque otras funciones pueden utilizarse para conseguir la forma adecuada. Se definen los valores mínimo y máximo de la mínima distancia entre los puntos de diseño adyacentes y se reemplazan en las fórmulas descritas por Gibb (1998):

donde a es el valor promedio entre el máximo y el mínimo y b es el parámetro que controla crecimiento de la función, obteniendo así la expresión explícita para la función de deseabilidad que controla la menor separación entre grupos de experimentación, denotada por d min . Una elección adecuada de los parámetros a y b permite incorporar la restricción de interés que se considere apropiada.
3. Ejemplo y Resultados
Como ilustración del procedimiento mencionado se considera el modelo no lineal (Bates y Watts 1988) y se construyen diseños D-óptimo local y luego penalizado utilizando las funciones de deseabilidad. El experimento se llevó a cabo con una enzima tratada con puromicina. Se supone que la velocidad de la reacción enzimática depende de la concentración de sustrato de acuerdo a la ecuación presentada de Michaelis-Menten:

donde η es la velocidad pronosticada de la reacción y la x es la concentración de sustrato. La forma modelo esperada se presenta en la Figura 1.



El cálculo numérico para obtener los diseños óptimos se realizó con el software estadístico R. Implementando el procedimiento nls de la librería R (R Core Team 2014) se obtiene la estimación de mínimos cuadrados no lineal de los parámetros del modelo de Michaelis-Menten:  1 = 212,68 y
1 = 212,68 y  2 = 0,064. Se pretende establecer el diseño D-óptimo en este modelo. Como el número de parámetros desconocidos es igual a dos, entonces, según el teorema de equivalencia (Atkinson, Donev y Tobias 2007), existe un diseño D-óptimo concentrado en dos puntos: x
1 y x
2. El procedimiento neldermead de la librería R (requiere el paquete “nloptr”) provee la minimización de una función mediante el algoritmo simplex de Nelder-Mead. El diseño D-óptimo resultante es
2 = 0,064. Se pretende establecer el diseño D-óptimo en este modelo. Como el número de parámetros desconocidos es igual a dos, entonces, según el teorema de equivalencia (Atkinson, Donev y Tobias 2007), existe un diseño D-óptimo concentrado en dos puntos: x
1 y x
2. El procedimiento neldermead de la librería R (requiere el paquete “nloptr”) provee la minimización de una función mediante el algoritmo simplex de Nelder-Mead. El diseño D-óptimo resultante es

Son evidentes tres características poco prácticas de este diseño experimental. No hay un grupo de control. También se observa que el punto máximo de diseño x 2 está por fuera de la región de experimentación y el primer punto de diseño x 1 está cerca del punto de control, es decir, está cerca de 0. En conclusión, el investigador desea obtener un diseño óptimo de tres puntos con un grupo control con el 50% de observaciones, donde el tamaño total de la muestra es 20 observaciones, con el punto máximo de diseño dentro de la región de experimentación y con la mínima diferencia entre puntos adyacentes al menos 0,1 unidades de concentración. Para solucionar estos inconvenientes se penaliza el diseño D-óptimo obtenido a través del uso de las tres funciones de deseabilidad.
Al diseño D-óptimo de 2 puntos se adiciona el punto de control, obteniendo así el diseño de 3 puntos. Teniendo en cuenta el tamaño total de la muestra de 20 observaciones, con un diseño de 3 puntos, es razonable suponer al menos seis observaciones deben ser asignados al grupo control. La siguiente función de deseabilidad descrita por Derringer y Suich (1980), dada en (11), refleja esta deseabilidad:

Un gráfico de esta función deseabilidad, dado en la Figura 2, muestra que la asignación de menos de seis observaciones en el grupo control es inaceptable.

Figura 2 Gráfica de las funciones de deseabilidad d 11(n 1) (línea sólida), definida en (11) y d 12(n 1) (línea punteada), definida en (16).
En la Figura 1 se observa que la curva se aproxima a la horizontal alrededor de 3. Como resultado, este punto proporciona poca información sobre la curva de concentración-velocidad y parece no ayuda en la detección de la velocidad en la región de baja concentración. Por lo tanto, es razonable que un investigador consideraría una concentración de sustrato máxima mayor que 3 inaceptable. La función de deseabilidad de la forma de Gompertz descrito por Harrington (1965), refleja este interés práctico:

Un gráfico de esta función en la Figura 3 muestra que el punto de diseño máxima, x 3, se considera indeseable cuando se aproxima a 3.
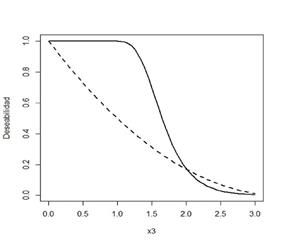
Figura 3 Gráfica de las funciones de deseabilidad d 21(x 3) (línea sólida), definida en (12) y d 22(x 3) (línea punteada), definida en (17).
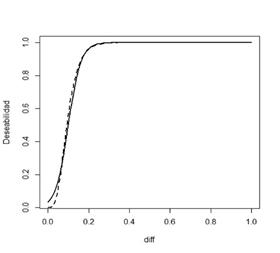
Para mantener los grupos de concentración distanciados apropiados desde la perspectiva práctica, se asumió que los grupos de concentración adyacentes se colocan de manera óptima separados al menos por 0,1 unidades de la concentración. La función de deseabilidad basada en la función logística propuesta por Gibb (1998), se utiliza en este caso:

Un gráfico de esta función en la Figura 4 muestra que la diferencia mínima entre dos puntos adyacentes del diseño se considera indeseable a medida que se aproxima a 0,1 unidades de la concentración.
La función de deseabilidad total es

El procedimiento neldermead de la librería R (R Core Team 2014) provee la minimización del nuevo criterio (5) mediante el algoritmo simplex de Nelder-Mead. Los diseños óptimos penalizados se generaron para valores de Λ en múltiplos de 2 × 10-6 con el índice k = 1, 2, ... , 30. Las Figuras 5, 6 y 7 presentan gráficamente las respuestas de Var( ), D
1, x
2, n
1 y x
3 del diseño penalizado en función del múltiplo k. Las respuestas de la función de deseabilidad se convierten en estables en el rango de k = 27.
), D
1, x
2, n
1 y x
3 del diseño penalizado en función del múltiplo k. Las respuestas de la función de deseabilidad se convierten en estables en el rango de k = 27.


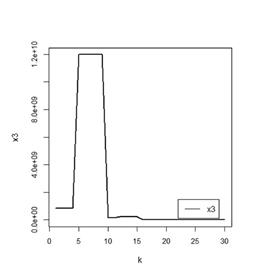
El diseño óptimo penalizado para este rango de k resulta ser

Este diseño óptimo tiene las características prácticas deseadas: incluye tres grupos de concentración de sustrato distintos, separados al menos por 0,1 unidades de concentración y el grupo de control tiene el 50% de todas las observaciones.
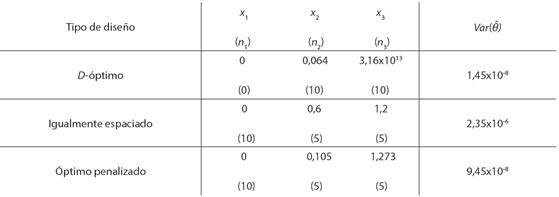
Una forma alternativa para incluir restricciones deseadas podría ser limitar la región experimental a [0; 1,2] y colocar los 3 puntos de diseño separados por la misma distancia, obteniendo así el diseño de puntos igualmente espaciados elegido arbitrariamente.
En la Tabla 2 se presentan los 3 diseños experimentales distintos para el modelo de MichaelisMenten, definida en (9) y sus respectivas varianzas de los parámetros estimados. La varianza más pequeña tiene el diseño D-óptimo. El diseño penalizado posee las características prácticas deseadas por el investigador, aunque hay un ligero aumento en la varianza de los parámetros estimados en comparación con el diseño D-óptimo, pero este diseño óptimo penalizado es una mejora en términos de la varianza de los parámetros sobre el diseño de puntos igualmente espaciados elegido arbitrariamente.
El diseño óptimo penalizado fue generado mediante las funciones de deseabilidad individuales d11(n1), d21(x3) y d31(min(diff)), definidas en (11), (12) y (13) respectivamente. Sin embargo, la elección de las funciones de deseabilidad no es única. Otras funciones de forma diferente pueden ser definidas para obtener una deseabilidad equivalente de las anteriores.
Así, una función

expresa la deseabilidad similar de la función d11(n1) para que el grupo de control tenga el 50% de todas las observaciones, ver la Figura 2. Una función

expresa una deseabilidad similar de la función d 21(x 3) para el punto de diseño máximo, x 3, para que esté dentro de la región de experimentación, como se ve en la Figura 3.
Se definen las tres nuevas funciones de deseabilidad totales, D 2 = (d 12 × d 21 × d 31)1/3, D 3 = (d 11 × d 22 × d 31)1/3 y D 4 = (d 12 × d 22 × d 31)1/3, utilizando las nue-
vas funciones de deseabilidad individuales, d 12 y d 22. Las efectividades de las funciones de deseabilidad se examinan al comparar los diseños óptimos penalizados utilizando D 2, D 3 y D 4 con el diseño óptimo penalizado obtenido utilizando D 1. Los diseños óptimos penalizados generados mediante las funciones de deseabilidad D 2, D 3 y D 4 se dan en la Tabla 3 junto con el diseño penalizado original utilizando D 1.
TABLA 3 DISEÑOS ÓPTIMOS PENALIZADOS PARA EL MODELO DE MICHAELIS-MENTEN, DEFINIDO EN (9), USANDO EL CRITERIO (5).
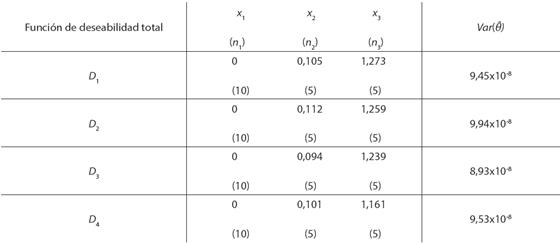
Se observa que estos cuatro diseños son notablemente similares. Se ha demostrado en este caso que los diseños experimentales penalizados son similares para funciones de deseabilidad que tienen formas similares. El analista debe elegir un valor de k, mencionado antes, que proporcione el equilibrio adecuado entre la optimalidad y la penalidad. En todos los casos, la técnica de diseño penalizado ha proporcionado un diseño experimental con las características deseadas establecidas por el investigador.
4. Discusión y Conclusiones
Para motivar la necesidad de la técnica de diseño óptimo que tenga en cuenta de las preferencias de diseño prácticas se enfatizó el problema que puede surgir entre los diseños experimentales generados utilizando criterios de diseño óptimo y características de diseños prácticas deseadas por un investigador.
La técnica de diseño óptimo penalizado propuesta por Parker (2005) genera diseños experimentales con buenas propiedades de inferencia estadística y desde una perspectiva práctica. Las características prácticas están definidas por una función de penalización, que se define mediante una función de deseabilidad general. Esta función se añade a un criterio tradicional alfabético para penalizar los diseños experimentales poco prácticos. El diseño óptimo penalizado resultante es estadísticamente óptimo de acuerdo con el criterio de diseño alfabético y también tiene las características prácticas deseadas. Por lo tanto, si el uso de la teoría del diseño óptimo conduce a un diseño inadecuado desde una perspectiva práctica, un investigador puede considerar el uso de criterios óptimos penalizados en lugar de alterar arbitrariamente el diseño óptimo. El uso de la estrategia de diseño óptimo penalizado permite al usuario especificar las características particulares del diseño experimental que se consideran importantes. Estas pueden describirse como funciones continuas en lugar de restricciones fijas.
Los criterios de diseño óptimo penalizado incluyen un parámetro definido por el usuario, Λ, para controlar el equilibrio entre la deseabilidad total y la optimalidad. Los diseños óptimos penalizados varían la optimalidad estadística total a favor de las características de diseño prácticas.
En el diseño óptimo penalizado propuesto por Parker (2005), las restricciones se agrupan en una función de penalización a través de la función de deseabilidad total, donde la última es la media geométrica de las funciones deseabilidad individuales. Una ventaja de usar la media geométrica para las funciones deseabilidad individuales es que ella es muy sensible a cualquier de los valores de sus factores. Así, si uno de los factores es indeseable, la deseabilidad total es nula. Además, si el usuario quiere atribuir más peso a un subconjunto de condiciones, puede utilizar una función de deseabilidad ponderada.
En este artículo se presentó una metodología que le permita al investigador a elegir las funciones de deseabilidad adecuadas de acuerdo a las restricciones del diseño experimental desde un punto de vista práctico y además se ilustró un ejemplo a partir del modelo de Michaelis-Menten, definido en (8). En este ejemplo se mostró que los diseños óptimos penalizados representan una mejora en términos de la varianza de los parámetros estimados comparado con un diseño experimental elegido arbitrariamente. Además se encontró similitudes en los diseños óptimos penalizados generados por las funciones de deseabilidad comparables en su forma.

