











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. Introducción
La inclusión de robots dentro de la medicina quirúrgica abre un campo de convergencia entre diversas áreas, lo cual se traduce en un beneficio adicional para los pacientes (V Joseph et al., 2005). Con la aparición de los micro robots (máquinas basadas en la primera generación de robots pero con una considerable disminución en su tamaño), las aplicaciones crecen potencialmente, porque sin tener modificaciones importantes en su estructura funcional, conservan la movilidad y anatomía del modelo inicial. Una de estas, es la movilización de autómatas a través de cavidades corporales con el objeto de ejecutar procedimientos que antes parecían imposibles sin una laceración (Dario et al., 2000; Mack, 2001). En el futuro se espera que la evolución de estos dispositivos permita ejecutar funciones más complejas en múltiples intervenciones quirúrgicas.
La incidencia de una cápsula endoscópica en el diagnóstico gastrointestinal es un claro ejemplo de robótica aplicada. El reemplazo de la manguera por una píldora que contiene una cámara diminuta, ha disminuido considerablemente el trauma que sufren los pacientes con este incómodo procedimiento. Avances futuros apuntan a que la píldora incluya un mecanismo de recolección de tejido a partir de muestras, procedimiento conocido como biopsia, que sustituya completamente el método convencional (Menciassi et al., 2007).
A pesar de estar en una etapa de desarrollo muy temprana, con los micro robots ya se visualizan varios procedimientos médicos, entre ellos la administración objetiva de fármacos (Woods & Constandinou, 2013), concentrando la cantidad de medicamento necesario sobre cierta área del cuerpo, optimizando el uso de la substancia y evitando efectos secundarios no deseados (Lai et al., 2014). En tratamientos de braquiterapia, será posible irradiar células cancerígenas desde adentro, posicionando un emisor cerca de las células no deseadas, como un tumor (Phillip & Devlin, 2015). El beneficio frente a otras técnicas como la quimioterapia, es que el posicionamiento sería relativamente sencillo y no varía con el movimiento del paciente, disminuyendo considerablemente la exposición sobre otras áreas no deseadas. Actualmente los métodos más destacables para llevar a cabo dichos procesos usan campos magnéticos de alta frecuencia (Andrä & Nowak, 2007), y resonancia ultrasónica (D.-H. Kim et al., 2004).
La remoción de material también se muestra con un panorama alentador, limpiando caminos, realizando cortes o en la obtención de muestras de tejido (Qiu et al., 2012). Debido a que el micro robot no es lo suficientemente grande para llevar herramientas, él en sí es la herramienta. La ablación (eliminación de un órgano o tejido mediante una intervención quirúrgica), es posible con motores rotatorios similares al funcionamiento de un taladro, por ejemplo en la remoción de grasas acumuladas en las vías circulatorias (Qiu et al., 2012). O también el uso de ondas de ultrasonido haría resonar mecánicamente el micro robot, destruyendo objetos determinados como un cálculo (Watson et al., 2009). Con el diseño adecuado, las biopsias (muestras de tejido) se extraerían del paciente para un posterior análisis (Menciassi et al., 2007). Futuras y más complejas tareas apuntan a que esos análisis puedan realizarse directamente en el ambiente donde se toma la muestra, apoyando la tarea con sensores y comunicación inalámbrica (Shah et al., 2009).
Utilizados como estructuras móviles, existe la capacidad de controlar el movimiento y ubicación de un puente entre células, tejidos o arterias, mediante el uso de viaductos microscópicos guiados por un micro robot (Luechinger et al., 2010; Zhang et al., 2005). El micro robot podría moverse a lo largo de un canal hasta posicionar una endoprótesis vascular, que son dispositivos tubulares que se colocan temporalmente sobre algún ducto, ayudando a sanar el tejido o manteniendo el canal libre de obstáculos (Saito et al., 2003); o bien realizando la oclusión intencional en una vía, de forma temporal o permanente, como una vena que alimenta un tumor (Ergeneman et al., 2008; Park et al., 2010). Finalmente un micro robot que pueda ubicarse de forma temporal o permanente en el cerebro para su estimulación (Chatzipirpiridis et al., 2015), podría capturar una señal de interés para transmitirla de forma inalámbrica, o hacer llegar un delgado cable hasta dicho punto; lo cual revolucionaría sin duda los actuales sistemas de electrodos.
Incluso un micro robot capaz de transmitir información desde un lugar específico a través de diferentes canales (radio, ultrasonido, etc.), podría mejorar la calidad de la información disponible sobre un paciente. En un punto remoto se dispondría del historial de comportamiento de la región de interés (por ejemplo la concentración de oxígeno en una arteria) (Cui et al., 2007), mientras que la ubicación del robot permitiría hallar un fenómeno interno (como un sangrado), informar dicha posición y realizar tareas de medición del fenómeno y su posterior transmisión de alerta (Kim et al., 2007).
En esta tecnología uno de los principales retos existentes es cómo mover al micro robot. Debido a su dimensión, la complejidad de instalar medios de locomoción internos crece exponencialmente a medida que disminuye su tamaño. Es por esto que los sistemas de navegación externos son cada vez más utilizados como solución al problema de navegación. En especial, sistemas electromagnéticos controlados a partir de una corriente de entrada, que modifica los campos magnéticos generados. Uno de ellos, el “OctoMag”, es un sistema de cinco grados de libertad que permite manipular un micro robot en su espacio de trabajo a través de campos magnéticos producidos por ocho bobinas (Kummer et al., 2010). Este sistema es utilizado actualmente para estudiar la movilidad y manipulación de un micro robot dentro del humor vítreo de un conejo (Ullrich et al., 2013).
El uso de electroimanes da como ventaja el control directo de los campos magnéticos y gradientes generados, y por ende, un control más preciso del micro robot en el medio. Pero en cambio la desventaja se presenta en la cantidad de energía necesaria para alimentar dichos sistemas, requiriendo equipos dedicados, manejo de altas corrientes y derivado a esto último, alto consumo de potencia y generación de calor, lo cual podría afectar el rendimiento esperado (Dauge et al., 2007; Hagiwara et al., 2011).
La necesidad presente da lugar finalmente al desarrollo de sistemas de arreglos de electroimanes de menor consumo con un control satisfactorio sobre el dispositivo. En este artículo en particular se describe un sistema de navegación magnética basado en el arreglo Helmholtz-Maxwell (Yesin et al., 2006), junto con una técnica de fabricación de micro robots, llevados a cabo en el Instituto de Biorobótica de la Scuola Superiore Sant’Anna, Italia. Igualmente se presenta una herramienta de simulación por software desarrollada para determinar los requerimientos del sistema en diferentes escenarios. Al final se comparan los resultados producto de la experimentación y la simulación para determinar el valor de la herramienta software diseñada.
2. Materiales y métodos
Los medios externos de navegación magnética facilitan enormemente el control de posición de los micro robots, con la manipulación directa del campo magnético y el gradiente a través de las corrientes que fluyen por las bobinas. Esto permite modelar matemáticamente el movimiento del micro robot a través de las fuerzas que lo gobiernan y definir su posición a partir de las corrientes de entrada de las bobinas.
Modelado matemático
Por medio de las ecuaciones de Maxwell es posible definir la navegación magnética de un micro robot a través de la generación de una fuerza F y un torque T que se expresan a continuación (Jiles, 2015):
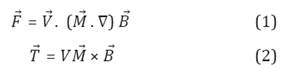
Donde B es el campo magnético,  el gradiente, V el volumen del robot y M la magnetización presente en el mismo.
el gradiente, V el volumen del robot y M la magnetización presente en el mismo.
Estas fuerzas son utilizadas en la mayor parte de los sistemas de navegación para micro robots, utilizando generalmente arreglos de bobinas tipo Helmholtz y Maxwell detallados en la Figura 1 (Choi et al., 2009). Una configuración tipo Helmholtz consiste en dos bobinas circulares idénticas, situadas a lo largo de un eje, separadas por una distancia d
h
que es igual a su radio r
h
. Aplicando la misma corriente, en la misma dirección, se genera un campo magnético altamente uniforme, que produce un torque sobre el micro robot. En la configuración Maxwell en cambio, la separación de los electroimanes d
m
es  , siendo r
m
el radio de las bobinas, con el flujo de las corrientes en sentidos opuestos. Esto permite generar un gradiente magnético casi uniforme a lo largo del eje, que se usa para aplicarle una fuerza magnética al robot.
, siendo r
m
el radio de las bobinas, con el flujo de las corrientes en sentidos opuestos. Esto permite generar un gradiente magnético casi uniforme a lo largo del eje, que se usa para aplicarle una fuerza magnética al robot.
La densidad del flujo magnético y su gradiente, asociados al arreglo de bobinas Helmholtz y Maxwell a lo largo del eje principal, pueden ser aproximados a un valor constante. Por tanto dichas cantidades van a depender directamente de la corriente aplicada al sistema, por las siguientes ecuaciones:
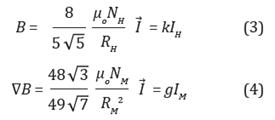
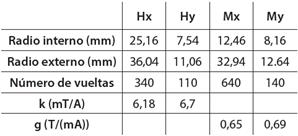
Donde k y g son coeficientes proporcionales, definidos por μ o la permeabilidad magnética en el vacío, N H y N M el número de vueltas y R H , R M el radio de las bobinas para Helmholtz y Maxwell respectivamente.
Con el fin de simplificar el modelo, se asume que el robot es un disco sólido, sumergido en un líquido con un número de Reynolds pequeño (flujo laminar casi estático), perpendicular a su eje. Con esa consideración, la fuerza de arrastre en un espacio cerrado puede ser aproximada por (Kim et al., 2001):
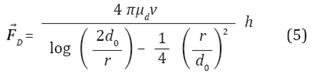
Donde μd es la viscosidad dinámica del fluido, v, h y r la velocidad, el grosor y el radio del robot respectivamente, y d0 la distancia desde el centro del microrobot hasta el espacio donde está confinado. En el plano, las fuerzas presentes sobre el micro robot se resumen a continuación:

Donde  y
y  están definidas por (1) y (5) respectivamente, m es la masa del micro robot y a la aceleración en el plano xy.
están definidas por (1) y (5) respectivamente, m es la masa del micro robot y a la aceleración en el plano xy.
Magnetización
El desarrollo de materiales compuestos de polímetros embebidos de polvos ferromagnéticos, es una interesante aproximación al desarrollo de micro robots que ofrezcan una buena controlabilidad magnética, al tiempo que se reduce el impacto secundario sobre las células en la región de operación. Es por ello que han sido propuestos varios micro objetos producto de mezclas de polímeros y NdFeB (iman de neodimio) para la fabricación de sus componentes MEMS (Pawlowski & Töpfer, 2004).
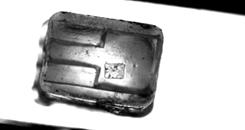
Para el sistema actual en particular, los micro robots son fabricados a partir del polímero PDMS, por su biocompatibilidad, alta viscosidad (favorable durante la fabricación) y con diferentes concentraciones de polvo de NdFeB. Iacovacci et. al., describen el proceso de fabricación para obtener una delgada película del compuesto, en el rango de 15-35 µm (dependiendo de la concentración del polvo), siendo luego cuidadosamente cortados de forma manual en dimensiones cercanas a los 500 µm.
La caracterización para cada concentración de polvo magnético en el polímero se realiza de manera experimental, aplicando un campo de excitación H, para obtener la magnetización M del compuesto. La variación en la concentración de NdFeB, describe diferentes curvas en el comportamiento magnético, la susceptibilidad y saturación magnética (Iacovacci et al., 2015).
Experimentación y desarrollo
El proceso de experimentación se llevó a cabo en el laboratorio del Instituto de Biorobótica de la Scuola Superiore Sant’Anna, ubicado en Pontedera, Pisa, Italia. Durante la estancia llevada a cabo por el autor principal de este artículo, se tuvo acceso al sistema de electroimanes presente (Figura 6), recogiendo suficiente información para comparar el modelo de simulación, complementando con la elaboración de nuevos micro robots realizando el procedimiento mencionado anteriormente.
Unity3D es un motor gráfico ampliamente utilizado para videojuegos. Incluye un motor de físicas decente y es muy versátil al incluir nuevas funciones de trabajo. A pesar de no ser una herramienta ideal para realizar simulaciones físicas, resulta bastante interesante evaluar las capacidades de modelamiento matemático a la vez que ofrece un resultado gráfico bastante llamativo. Dentro de los objetivos de este trabajo, se deseaba evaluar igualmente el potencial de la herramienta, con el fin de aprovechar la facilidad de manipulación de objetos 3D, que aportarán sin duda más datos a investigaciones de este tipo.
Dentro del plan propuesto, la comparación se realizaría con la respuesta del sistema a través de la velocidad obtenida por las distintas concentraciones de polvo magnético presente en el micro robot. Esto permitiría definir si la herramienta tiene el potencial esperado para dichos experimentos y posteriormente, ser capaz de simular escenarios más complejos, haciendo símil a un ambiente real de aplicación médica. El enfoque en estos nuevos escenarios supone determinar nuevas características físicas y técnicas necesarias para utilizar un sistema de navegación electromagnético en el cuerpo humano, con el fin de encontrar los requerimientos y limitaciones de energía para la navegación del robot.
Modelado del sistema para simulación
Para la simulación del sistema se utilizó el arreglo de bobinas Helmholtz y Maxwell presente en el laboratorio (Figura 2), con las características resumidas en la Tabla 1. En ella se encuentran las dimensiones para las bobinas tipo Helmholtz y tipo Maxwell en los ejes X e Y, número de vueltas y el cálculo de las constantes k y g de acuerdo a las Ecuaciones (3) y (4).

Adicionalmente para llevar a cabo el experimento está presente un PC, una cámara de video (BASLER scA1390-17gc), una tarjeta de adquisición de datos (NI DAQ USB-6259), el sistema de alimentación de las bobinas, y un micro ambiente para contener el líquido (aproximadamente 7 µL), léase arena. El control, la interfaz y recopilación de datos se realiza con LabVIEW©.
3. Resultados
El proceso de experimentación consistió en introducir el micro robot en la arena y efectuar pruebas de movimiento a través de la inyección de la corriente necesaria para obtener un campo magnético y gradiente máximo de 8 mT y 0.6 T/A respectivamente, generando el torque y la fuerza magnética necesaria para el desplazamiento controlado del micro robot. La cámara realiza registros (fotos) 100 veces por segundo, similares al mostrado en la Figura 3, que son almacenados en el PC. Dichos registros son posteriormente analizados con el fin de determinar las velocidades alcanzadas por el micro robot, a través de un algoritmo de imagen utilizando MatLab®. Esta variable fue utilizada para comparar la respuesta obtenida en el modelo de simulación.
El modelado 3D de las características físicas se realizó en el software CAD SolidWorks®, posteriormente fue exportado al motor gráfico Unity3D. La escena contiene las medidas exactas del modelo real con el fin de tener una mayor correspondencia en la física completa del sistema (Figura 2).
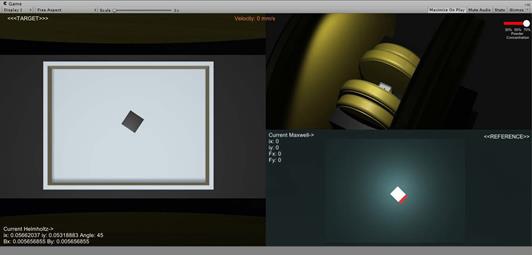
El comportamiento magnético del micro robot se modela a partir de dos scripts en C#, para el torque y la fuerza magnética presente, que corren simultáneamente. En la escena se presentan indicadores de las variables utilizadas en el sistema, leídas directamente de dichos scripts. Por último la variable de salida (velocidad) se almacena en un documento de texto para su análisis posterior. La escena queda dividida en tres cámaras (Figura 4), a la izquierda el comportamiento del micro robot, a la derecha arriba la vista general del sistema y a la derecha abajo la referencia u orientación. El control del sistema se realiza con un joypad, aunque también es posible utilizar el teclado.
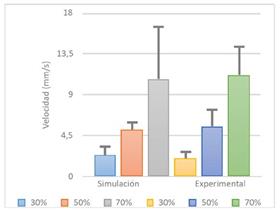
Efectuando repetidas veces el proceso de simulación, los datos se almacenan con el fin de compararlos con la respuesta de la experimentación. Para ello se utilizan tres concentraciones de polvo magnético (30%, 50% y 70%), obteniéndose sus respectivas curvas de magnetización (Figura 5), con el fin de variar los parámetros de entrada en la simulación, donde se observa su comportamiento y su fiabilidad al modelo real. La variable de salida analizada es la velocidad, que está directamente ligada a la concentración magnética de cada elemento.
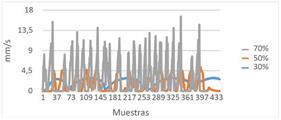
En la Figura 6 se comparan los resultados promedio obtenidos en la simulación (izquierda), con los valores promedio registrados en la experimentación (derecha), para cada concentración de NdFeB. Los resultados en la simulación varían conforme la cantidad de concentración presente en el material, mostrando una clara correlación entre la velocidad y la concentración magnética, tal como en el sistema real. De igual manera, una mayor concentración obtendrá mejores respuestas en desplazamiento, pero una mayor dificultad de control de posición.
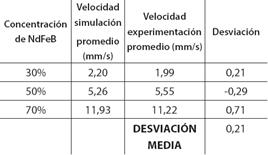
En la siguiente tabla se resumen los valores promedio de velocidad, obtenidos tanto en experimentación como en simulación. La desviación media obtenida en los resultados es de alrededor de 0.2 mm/s, un valor bastante bueno si se compara con modelos de simulación actuales en estos escenarios (Arcese et al., 2013).
4. Conclusiones
Los resultados obtenidos dan cuenta del potencial de la herramienta de simulación para la planeación de sistemas en escenarios diversos. Esto significa que a través de este modelo, es posible prever recursos y requisitos de funcionamiento en la navegación electromagnética de micro robots en un ambiente determinado. De igual forma, podría establecerse la base para el desarrollo de un sistema de planeación operativa de micro robots en un ambiente quirúrgico futuro, tales como el punto de inserción, el recorrido más favorable, etc.
Aunque el comportamiento físico está principalmente modelado matemáticamente en el código de la simulación, es posible que se presenten algunas limitaciones en casos especiales debido a las aproximaciones del modelo, restricciones de programación de máquina o del motor físico incluido en Unity3D. Aún con esto el rendimiento del sistema modelado mantiene una clara correlación a la variación de concentración magnética del micro robot observada en el proceso de experimentación, que a su vez coincide con los resultados de Iacovacci (Iacovacci et al., 2015).
Aunque hay un campo bastante interesante en el uso de Unity3D como plataforma de simulación para nuevos sistemas electromagnéticos, cabe destacar la necesidad emergente de sistemas de planeación para la navegación de micro robots en un entorno operativo de medicina. La versatilidad del motor gráfico y las propiedades del motor físico, facilitarían en gran medida el desarrollo de dichas aplicaciones, a la par que ofrecerían una visualización en tiempo real del comportamiento del micro robot. Igualmente es un campo bastante amplio en el que las herramientas de simulación tendrán un gran aporte en la operatividad de los micro robots para usos médicos. Todo esto hace parte de los futuros trabajos que serán abordados con esta herramienta.

