










Services on Demand
Journal
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkRevista Lasallista de Investigación
Print version ISSN 1794-4449
Rev. Lasallista Investig. vol.12 no.1 Caldas Jan./June 2015
Behavior-based connectivity control for robot networks*
Control de conectividad basado en comportamientos para redes de robots
Controle de conectividade baseado em comportamentos para redes de robôs
Andres Felipe Acosta Gil**, Gustavo Alonso Acosta Amaya***, Jovani Alberto Jiménez Builes****
* Artículo Original derivado de investigación de tesis de maestría "Modelo de navegación colaborativa en escenarios estructurados" de la Universidad Nacional de Colombia. Lugar y fecha de la investigación: Medellín, junio de 2012.
** Estudiante de Maestría. Sistemas. Universidad Nacional de Colombia. Medellín, Colombia.
*** Magíster en Ingeniería. Sistemas. Docente de la Facultad de Ingeniería. Politécnico Jaime Isaza Cadavid. **** Doctor en Ingeniería Sistemas. Docente de la Facultad de Minas. Universidad Nacional de Colombia. Medellín, Colombia.
Autor para correspondencia: Jovani Alberto Jiménez Builes, e-mail: jajimen1@unal.edu.co
Artículo recibido: 15/07/2013; Artículo aprobado: 15/05/2015.
Abstract
Introduction. In this article, we address the problem in which a Multi-robot System (MRS), conforming a Mobile Ad-hoc Network (MANET), has to reach a given goal while maintaining a connected topology with a fixed Base Station (BS). Objective. To design a connectivity control reactive algorithm for a MRS in a goal seek mission. Materials and Methods. Based in the work proposed in (Antonelli, Arrichiello, Chiaverini, & Setola, 2006), an algorithm is proposed that incorporates a Depth First Search (DSF) and implements a set of behavior-based task functions. Moreover, robots can take the role of explorers or relays. Results. The algorithm is validated through computer simulations in a scenario like the one found in (Antonelli, Arrichiello, Chiaverini, & Setola, 2006), but varying the position of the goal. Results show the affectivity of the proposed algorithm. Conclusions. Improvements included in the proposed algorithm provide better flexibility and robustness by allowing the robots to take different roles. Furthermore, the MRS connectivity is maintained even if the goal is farther than the distance it can reach.
Key words: artificial Intelligence, robotics, simulation.
Resumen
Introducción. En el presente artículo se aborda el problema en el cual un sistema de múltiples robots (MRS), que conforma una Red Ad-Hoc Móvil (MANET), debe llegar a un punto determinado, mientras mantiene una topología conectada con una estación base (BS) fija. Objetivo. Diseñar un algoritmo reactivo de control de conectividad para un MRS en una misión de llegar a la meta. Materiales y métodos. Con base en el trabajo propuesto en (Antonelli, Arrichiello, Chiaverini, & Setola, 2006), se propone un algoritmo que incorpora una búsqueda en profundidad (DSF) e implementa una serie de funciones de tarea basadas en comportamientos. Además, los robots pueden tomar el rol de exploradores o repetidores. Resultados. El algoritmo es validado por medio de simulaciones en un escenario similar al encontrado en (Antonelli, Arrichiello, Chiaverini, & Setola, 2006), pero variando la posición de la meta. Los resultados muestran la efectividad del algoritmo propuesto. Conclusiones. Las mejoras incluidas en el algoritmo propuesto permiten una mayor flexibilidad y robustez al permitir que los robots puedan tomar diferentes roles. También, la conectividad del MRS se mantiene aún si la meta está más allá de la distancia que éste puede alcanzar.
Palabras clave: inteligencia artificial, robótica, simulación.
Resumo
Introdução. No presente artigo se aborda o problema no qual um sistema de múltiplos robôs (MRS), que conforma uma Rede Ad-Hoc Móvel (MANET), deve chegar a um ponto determinado, enquanto mantém uma topologia conectada com uma estação baseie (BS) fixa. Objetivo. Desenhar um algoritmo reativo de controle de conectividade para um MRS numa missão de chegar à meta. Materiais e métodos. Com base no trabalho proposto em (Antonelli, Arrichiello, Chiaverini, & Setola, 2006), propõe-se um algoritmo que incorpora uma busca em profundidade (DSF) e implementa uma série de funções de tarefa baseadas em comportamentos. Ademais, os robôs podem tomar o papel de exploradores ou repetidores. Resultados. O algoritmo é validado por meio de simulações num palco similar ao encontrado em (Antonelli, Arrichiello, Chiaverini, & Setola, 2006), mas variando a posição da meta. Os resultados mostram a efetividade do algoritmo proposto. Conclusões. As melhoras inclusas no algoritmo proposto permitem uma maior flexibilidade e robustez ao permitir do que os robôs possam tomar diferentes papéis. Também, a conectividade do MRS se mantém ainda se a meta está além da distância do que este pode atingir.
Palavras chaves: inteligência artificial, robótica, simulação.
Introduction
There has been an increasing interest in cooperative multi-robot systems (MRS) since they can offer several benefits over a single robot including performance, fault tolerance and flexibility (Cao, Fukunaga, & Kahng, 1997). As investigations advance in this field, more complex tasks and application scenarios come up.
Particularly, we are interested in MRS to support search and rescue missions, which associated scenarios are characterized by:
- Unstructured and highly dynamic environments.
- Telecommunication infrastructure is damaged and unavailable due to natural disasters like earthquakes and fires.
- The rescue team is established in a central point (Base Station) where victims are attended and from which agents start to look for victims with the requirement of frequently communicating with it. Furthermore, some agents are equipped with a video camera and need a constant video stream to the BS where other members help to identify possible victims or places where potential ones can be found.
This scenario imposes several research challenges, e.g, navigation in unstructured environments, distributed coordination and task allocation, which must be intended to find victims in an effective and efficient fashion. An interesting method to accomplish it aimed to find an optimal solution is through coordination, which can be defined as: "cooperation in which the actions performed by each robotic agent take into account the actions executed by the other robotic agents in such a way that the whole ends being a coherent and high-performance operation" (Farinelli, Iocchi, & Nardi, 2004).
Most investigations show that coordination can be achieved through explicit communication, which needs a dedicated device to exchange information with other individuals of the team (Iocchi, Nardi, & Salerno, 2001). Therefore, a wireless ad-hoc network is a good option to establish an explicit communication scheme in a MRS, which additionally can extend the wireless coverage offered by the BS through message multi-hop delivery, allowing searching victims in farther locations. Moreover, other research topics like distributed task allocation can benefit when an ad-hoc network is established among the robots (Gerkey & Matarić, 2001).
It's more viable to implement a MANET nowadays than some years ago due to recent advances and associated cost reductions in energy-efficient wireless technologies including devices like MEMS, protocols like zigbee and algorithms like topology control. Taking these technologies properly to the multi-robot field represents a new research challenge. Topology control algorithms, for instance, are specially designed for wireless sensor networks (WSN), and a significant number of publications are dedicated to fixed ones, while in mobile ones it's often assumed that, due to applications like vehicle networks, the node's movement is uncontrollable and is modeled as a random variable (Santi, 2005).
In this article, a topology control algorithm aimed to maintain the connectivity in a multi-robot MANET (robot network) is presented. The algorithm builds a depth-search tree from the Adjacency matrix of the communications graph of the MRS, and uses it to impose a constraint in the movement of the robots to maintain at least one descendant inside the coverage area of its ancestor and vice-versa. To control the movement of the MRS, a reactive approach, the null-space-based behavioral control (NSB) (Antonelli et al., 2008) is used. Working with a general graph instead of a virtual chain (Antonelli et al., 2006), provides flexibility and robustness, being the chain a particular case of the graph when the robots are spread along a line. Furthermore, any robot can dynamically take the role of an explorer or a relay in such a way that, sometimes, there are some idle robots which turn into explorers and start to move converging to the same goal, allowing extended coverage for the MRS and favoring connectivity maintenance. The algorithm is validated in Matlab® simulations where the MRS has to reach one or several goals, starting from pre-defined or random-connected topologies.
Materials and methods
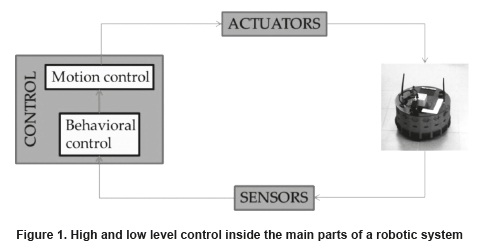
Connectivity control in a MRS can be carried out by movement control, i.e, the controller module of any single robot must compute its movement to accomplish some specific task and satisfy global connectivity of the robot network. Due to the dynamic and unpredictable nature of rescue scenarios, reactive control can be a proper architecture for the MRS (Arkin, 1998). This control architecture can be divided in a high level control and a low level control. The former is related to behavioral coordination or, in computer science, the action selection problem. It is in charge of combining single behavioral functions following some given policy to obtain an emergent behavior which can take the form of a reference velocity. The later, adapts this velocity to the specific locomotion system of the robot.
Therefore, the high-level control system can be designed independently of the actuator's properties of the mobile robot. Based in (Sciavicco & Villani, 2009) motion planning and mobile robots too! Robotics provides the basic knowhow on the foundations of robotics: modelling, planning and control. The text develops around a core of consistent and rigorous formalism with fundamental and technological material giving rise naturally and with gradually increasing difficulty to more advanced considerations.The theory of manipulator structures presented in the early part of the book encompasses:• the fundamentals: kinematics, statics and trajectory planning; and• the technology of actuators, sensors and control units.Subsequently, more advanced instruction is given in:• dynamics and motion control of robot manipulators;• mobile robots;• motion planning; and• interaction with the environment using exteroceptive sensory data (force and vision, figure 1 shows high (behavioral) and low (motion) control as part of the main components of a robotic system.
Regarding the policy carried out by the behavioral coordinator, there are two main approaches (Antonelli et al., 2008): competitive, in which tasks (behaviors) are sorted by priority depending on the environment context, and only the one with the highest priority is selected as the emergent behavior; and cooperative, in which the emergent behavior Is comprised of the linear combination of the single behaviors, the weight factor can be selected depending on the priority of the task.
Particularly, our connectivity control algorithm is built on a high-level behavior-based scheme known as the Nullspace-based behavioral control (NSB) (Antonelli et al., 2008), which main theoretical equation 1 is:

The previous equation illustrates the case of three behavioral task functions, each one con-tributes with the velocities v1, v2 and v3. The NSB dynamically sorts these velocities in a context-dependent priority, so that sub-indexes denote the degree of priority, i.e. v1 denotes the velocity associated to the highest priority task (which could be, for instance, an obstacle avoidance task) and so on. These task functions are combined in such a way that, before adding its contribution, the lower priority tasks are projected into the nullspace of the higher priority ones using the N1 operator. It can be noticed that the NSB can be considered as a hybrid between the cooperative and competitive behavioral coordination methods.
Our NSB implementation considers the following assumptions:
- Every robot is modeled as punctual and holonomic
- Every robot knows its position
- Position of obstacles is known
- There's no noise sources or errors that affect control outputs
Additionally, the connectivity control algorithm assumes:
- An initially-connected robot network
- An ad-hoc network protocol established among the robots and the BS
- Communication among robots and the BS runs without time delays or bandwidth issues
- The graph representing the robot network is modeled as an unit-disk graph (UDG)
- Thus, every robot can communicate its position to the base station, where an adjacency-matrix can be built and a depth-first search can be performed to obtain a depthsearch tree (DST), which in turn can be sent to the robots. Therefore, robots can know the ancestor-descendant relationships from the DST and task functions for connectivity preserving among them can be developed. It is worth noticing that these relationships can change over time as well as the DST due to the dynamic nature of a MANET in which links can appear or disappear.
Task functions
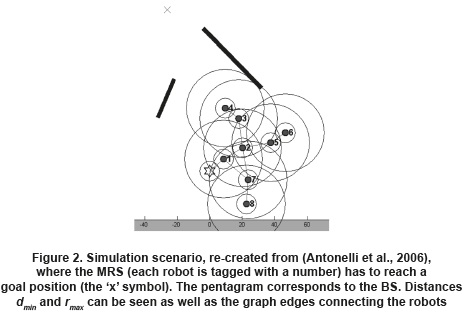
Based on the scenario showed in figure 2, where the MRS has to reach a goal position, the purposed algorithm should incorporate the tasks: move to goal, obstacle avoidance and those needed to maintain the connectivity in the MRS. We found in the work (Antonelli et al., 2006) that a dynamic virtual chain is established in the MRS, so that tasks aimed to maintain connectivity are "keep the previous antenna in the comfort zone" (KPA) and "keep the next antenna in the comfort zone" (KNA), being the first antenna the closest robot to the BS, the second antenna the closest robot to the first one and so on. Moreover, there is an "agent" which is in charge of reaching the goal while covered by the antennas.
The comfort zone, showed in figure 3a, is a disk whose center is a robot, and is bounded by two radii: dmin and dmax, the former represents the minimum distance allowed among robots so they do not collide, and the later represents the maximum distance among robots so they do not lose connectivity. Additionally, rmax represents the real radius from which robots lose connectivity, a shorter distance dmax is selected to implement the task functions to counteract fading and other propagation phenomena in experimental implementations.
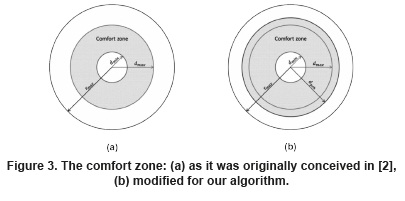
We modified the comfort zone as showed in figure 3b. To explain the distance dpch, consider the situation in which robots have to reach a goal farther from the maximum range of theMRS, i.e. n*dmax, if tasks are statically prioritized in such a way that KNA is always on top of KPA then, pulled by the "move to goal" task performed by the agent, the MRS will move until it forms a line so that the velocity outputs of KNA and KPA on each antenna will form 180° and, according to figure 1, the nullspace of KNA will nullify the KPA velocity causing, in this case, the first robot to move by the sole action of the KNA task and therefore disconnecting it from the BS. Therefore, we introduced the distance dpch, from which task's priority can be dynamically changed. Having into account the same situation, when the first antenna surpasses the distance dpch, a priority change takes place, being the task KPA on top of KNA. It causes the antenna to go back until it is at a distance dpchfrom the BS, where the task's priority change again so that the process ends in an oscillation behavior around , preventing in this way the loss of connectivity. We found that if dpch coincides with dmax, the oscillation behavior occurs around dmax, causing the agent to get stuck. On the other side, if d>dmax, any antenna that moves out from dpch changes its priority order while its previous antenna doesn't, so the agent and the antennas oscillate by pulling and covering, but their net movement is not null.
Following the same mathematical model, we generalized the tasks KPA and KNA into "cover ancestor" and "cover descendants". It is worth noting that differing from (Antonelli et al., 2006), where each antenna has only a previous and a next one; an ancestor could have several descendants. Moreover, the "move to goal" and "obstacle avoidance" tasks were carried out following the behavior-based theoretical formulae found in (Antonelli et al., 2008) with the contributions regarding to the obstacle avoidance activation found in (Gil, Reyes, & Amaya, 2011)"container-title": Revista Avances en Sistemas e Informática", "page": "165-172", volume": 8", issue: 3", source": http://www.redalyc.org", abstract": En este articulo se presenta el analisis y simulacion del modelo de control reactivo conocido como Null-Space-Based Behavioral Control (NSB.
Results
Simulations were performed on the scenario showed in figures 2 starting from pre-defined and random-generated graphs and considering the parameter values showed in table 1. Moreover, the parameters owned to the NSB like the inverse kinematics gain matrix, were established as in (Antonelli et al., 2006).
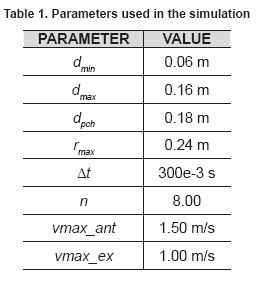
The algorithm was tested based on several configurations including: i) one goal and random- connected topology, ii) one goal and predefined topology, and, finally, iii) several goals and random connected-topology. Some of the future investigation issues came up from these simulations and will be discussed in the conclusions section.
Discussion
For sake of space, we will explain only the case i) described in the previous section, which can be seen in figure 4. Black nodes show typeone robots (vertex with no descendants), which correspond to the 'tails' of the DST's branches and take the role of explorers.
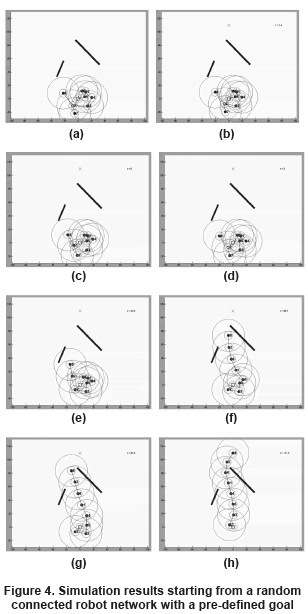
White nodes show type-2 robots (vertex with several descendants) and gray nodes, type-0 ones (vertex with one descendant), these take the role of relays. Figure 4a, shows the initial position of the MRS where robots 7 and 8 are explorers. Note that the function to generate the random graph takes into account the distance instead of, so robots 8 and 2 are close to the limit of losing communication, the same situation holds for robots 2 and 3. Hence, as it can be seen in figure 4b, task functions make these robots to get closer, casually causing the robot 2 to approach the BS and, because the DST is distance-based, changing ancestordescendant relationships in such a way that robot 4 turns into explorer, as showed in figure4c. Subsequently, robot 8 starts to move toward the goal pulling its ancestor (robot 2) away from the BS again and making a new change in the DST (figure 4d). At this point, there is a chain DST is distance-based, changing ancestordescendant relationships in such a way that robot 4 turns into explorer, as showed in figure 4c. Subsequently, robot 8 starts to move toward the goal pulling its ancestor (robot 2) away from the BS again and making a new change in the DST (figure 4d). At this point, there is a chainlike configuration in the DST, which is maintained until robot 7 is the closest to the BS; another chain-like configuration takes place which is preserved until the end of the mission, as showed in figure 4e. Finally, figures 4f and 4g show the obstacle avoidance performed by robot 8 before it reaches the goal in figure 4h.
Conclusions
In this paper, an algorithm aimed to maintain the connectivity in a multi-robot MANET was presented. Based on the article (Antonelli et al., 2006), where a dynamic virtual chain is established in the MRS and a set of behaviorbased tasks to maintain it were developed, we generalized the chain into a Depth-Search Tree (DST) obtained from a general graph, and made the proper modifications to the task functions. Furthermore, we modified the approach so the robots can dynamically take the role of explorers or relays, depending on their position in the DST.
To validate the algorithm, several simulations were performed, in some of them, investigation issues to be addressed in future research came up. One of the most important issues is related to local minima, which can be found when a distance limits two tasks whose associated velocities form 180°, e.g., when the goal is behind an obstacle, as it can be seen in figure 5a. We purpose to counteract this issue by adding a "wall following" task function to the approach, and incorporating in simulations the addition of noise to the final velocity.
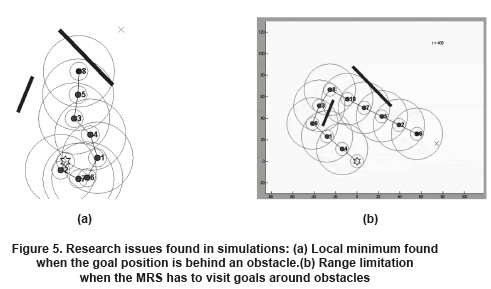
Another situation arises when the MRS results positioned in such a way that it cannot reach a goal although its range is enough to do it. In figure 5b, for instance, the MRS has to visit a goal (not showed) behind the wall from the left and after, visit the goal showed in the figure 5. A short-term solution to this issue could consist on identifying this situation and including a "move-to-BS" task function so the MRS can re-arrange and resume the move-to-goal task. A long-term solution could be the modification of the control architecture into a hybrid deliberative-reactive one so the MRS can predict the situation and plan the correct path to the goals.
Acknowledgements. Authors would like to give special thanks to the teachers of GIDATI research group who helped us with their support and assistance, particularly, to PhD. Roberto Hincapié, for contributing with key ideas, without which the research problem couldn't be solved they way it did, like algorithmic policies and simulation best practices. We also want to thank teacher Oscar Cardona, for kindly advising us with some geometric issues.
References Bibliographic
Antonelli, G.; Arrichiello, F. & Chiaverini, S. (2008). The null-space-based behavioral control for autonomous robotic systems. Intelligent Service Robotics, 1(1), 27-39. doi:10.1007/s11370-007-0002-3. [ Links ]
Antonelli, G.; Arrichiello, F.; Chiaverini, S. & Setola, R. (2006). Coordinated control of mobile antennas for ad hoc networks. International Journal of Modelling, Identification and Control, 1(1), 63-71. [ Links ]
Arkin, R. C. (1998). Behavior-based Robotics. MIT Press. [ Links ]
Cao, Y. U.; Fukunaga, A. S. & Kahng, A. (1997). Cooperative Mobile Robotics: Antecedents and Directions. Auton. Robots, 4(1), 7-27. doi:10.1023/A:1008855018923. [ Links ]
Farinelli, A.; Locchi, L. & Nardi, D. (2004). Multirobot systems: a classification focused on coordination. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 34(5), 2015-2028. doi:10.1109/TSMCB.2004.832155. [ Links ]
Gerkey, B. P. & Matarić, M. J. (2001). Principled Communication for Dynamic Multi-Robot Task Allocation. In P. D. Rus & D. S. Singh (Eds.), Experimental Robotics VII (pp. 353-362). Springer Berlin Heidelberg. Retrieved from http://link.springer.com/chapter/10.1007/3-540-45118-8_36. [ Links ]
Gil, A. F. A.; Reyes, R. C. H. y Amaya, G. A. A. (2011). Análisis de un esquema de control de comportamientos basado en sub-espacios nulos para roborts móviles. Revista Avances en Sistemas e Informática, 8(3), 165-172. [ Links ]
Iocchi, L.; Nardi, D. & Salerno, M. (2001). Reactivity and Deliberation: A Survey on Multi-Robot Systems. In Balancing Reactivity and Social Deliberation in Multi-Agent Systems (pp. 9-32). Springer Berlin Heidelberg. Retrieved from http://link.springer.com/chapter/10.1007/3-540-44568-4_2. [ Links ]
Santi, P. (2005). Topology Control in Wireless Ad Hoc and Sensor Networks. ACM Comput. Surv., 37(2), 164-194. doi:10.1145/1089733.1089736. [ Links ]
Sciavicco, L. & Villani, L. (2009). Robotics: Modelling, Planning and Control. Springer. [ Links ]
