











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
Introducción
El diseño de control óptimo con base en restricciones en la entrada de comando ha sido por décadas un interesante problema. Este tipo de sistemas de control se diseñan para eliminar el sobre-impulso u oscilaciones en la respuesta de los sistemas. Se les conoce normalmente como conformadores de entrada de comando o generadores de comando (Input Shapers, aunque es más común Input Shaping) (Singhose, 2009). En adelante serán IS. La entrada de comando es lo que en control normalmente se conoce como entrada de referencia, consigna o set-point, se usarán de manera indistinta en este trabajo. Estas técnicas datan de los años 50. Originalmente se les denominaba Posicast, y su desarrollo inicial se le atribuye a Smith (1957). Desde el trabajo inicial de Smith, se han conseguido avances en el desarrollo de controladores IS. Los primeros generadores de comandos, tales como Posicast, se les conocía como IS de vibración cero (ZV, Zero Vibration), y sufrían problemas de robustez, los cuales se detallarán más adelante en este artículo (Singhose et al., 1997). Actualmente se han propuesto generadores de comando robustos, que proporcionan beneficios a los sistemas reales. Por ejemplo, IS que son robustos a los errores en el modelamiento de la frecuencia natural han sido desarrollados, el primero de los cuales es denominado conformador de vibración cero y derivativo (ZVD, Zero Vibration and Derivative) (Singhose et al., 1997). Han sido diseñados IS para sistemas multi-modo (Hyde & Seering, 1991). También hay técnicas de conformación adaptativas propuestas por diferentes autores como Cutforth & Pao, 2002, y Kojima & Singhose, 2007.
Este artículo tiene la intención de promover el uso de la técnica Posicast en el diseño y desarrollo de sistemas electrónicos para la solución de problemas de sobre-impulso que se presenta en algunos circuitos, como son los convertidores de potencia, los amplificadores operacionales y algunos filtros activos usados en instrumentación. Sin embargo, a pesar de estas escasas aplicaciones, existe un alto potencial para su uso en otros sistemas y diseños. Por lo anterior, se realiza una revisión descriptiva de Posicast, que apunta específicamente a su aplicación en el desarrollo de circuitos electrónicos de potencia y en sistemas microelectrónicos (amplificadores operacionales y filtros). El objetivo es explorar la aplicación a la construcción de circuitos electrónicos para evidenciar el potencial que tiene esta técnica en el diseño de otros sistemas. Este artículo no trata exclusivamente las aplicaciones, sino que también introduce los conceptos fundamentales de la técnica Posicast/IS, para sentar las bases. Posteriormente, se presenta de forma descriptiva las principales aplicaciones y sus resultados.
Se procede de la siguiente forma. Primero se clasifica literatura para luego seleccionar los enfoques que resultan pertinentes desde una perspectiva metodológica. Se estudian los principios generales de la conformación de entrada en sistemas de control mediante la extracción de conceptos fundamentales encontrados en las referencias más relevantes. Se procede entonces a desarrollar el conformador Posicast de una manera más detallada, y su versión moderna realimentada. A continuación, se presenta de forma descriptiva la aplicación de Posicast en los sistemas microelectrónicos y en sistemas de potencia, así como los resultados obtenidos. Finalmente se presentan las conclusiones.
Materiales y métodos
Este artículo es una revisión descriptiva acerca de la aplicación de la técnica Posicast en el diseño de sistemas electrónicos. Los principios que rigieron la búsqueda fueron muy simples. Se usaron las cadenas "Posicast" y "Input Shaping" en las bases de datos IEEEXplore y ScienceDirect. Igualmente se usaron las mismas cadenas de búsqueda en los buscadores Google y Google Académico, para evitar que cualquier documento relacionado con el tema global Posicast/IS quedará por fuera y así contar con todas las investigaciones al respecto. Se usaron los referenciadores Scopus y Web of Science para buscar los artículos hallados en las bases de datos con el fin de garantizar su calidad. La búsqueda arrojó 160 hallazgos.
Se llevó a cabo un primer filtro, el cual consistía en determinar la relevancia de la temática Posicast/IS en cada uno de los artículos. La primera clasificación es entre artículos "Relevantes" y "No Relevantes". Se consideran "No Relevantes" aquellos trabajos en donde Posicast/IS no era el tema central bajo estudio, pero estaba presente como un elemento más dentro del sistema/ solución general presentada, sobre el que no se daban más información que una mención y la justificación de su uso. 100 (62.5 %) de los artículos quedaron en esta categoría. Estos trabajos fueron descartados para su análisis en el presente artículo, pero contribuyeron a reafirmar las aplicaciones de Posicast/IS.
Fueron 60 (37,5 %) artículos los que resultaron "Relevantes" para la temática que se estudia. Es decir, aquellos en donde Posicast/IS era el tema central de estudio. Se trabajó principalmente con estos artículos. Estos artículos se clasificaron a su vez en dos subcategorías. "Artículos Conceptuales" y "Artículos de Aplicaciones". En la primera subcategoría están los artículos donde se estudia la esencia conceptual de Posicast/IS. Estos trabajos ocurren en tres momentos; en los años 50, donde se presenta el concepto original Posicast por Smith (1957) y Cook (1966). Luego en los años 70 y 80, desde la ingeniería mecánica, Singer, Singh, Seering y Sighose aportan mejoras al Posicast original mediante los IS de orden superior, los cuales permiten reducir las limitaciones de aquel (Singhose et al., 1997; Singh & Heppler, 1993). Finalmente, en el año 2002 Hung aporta la versión realimentada de Posicast (Hung, 2002; Feng, Hung, & Nelms, 2002), y de allí en adelante se han realizado uno serie de investigaciones interesantes sobre Posicast/IS, como el análisis de las incertidumbres en los sistemas LTI con retardo y su impacto en Posicast (Evesque et al., 2003; Yildiray Yildiz et al., 2010); uso de técnicas adaptativas para el manejo de las incertidumbres y retardos (Dydek et al., 2013; Yildiray Yildiz & Annaswamy, 2015); desarrollo en tiempo discreto de controladores Posicast adaptativos y robustos (K. Abidi et al., 2016; Khalid Abidi et al., 2017; Khalid Abidi & Xu, 2015; Khalid Abidi & Yildiz, 2015; Khalid Abidi & Yildizt, 2011); diseño de controladores Posicast PID usando un algoritmo de búsqueda gravitacional (de Moura Oliveira et al., 2015); la aplicación de Posicast a plantas/procesos de orden fraccional (González et al., 2013); la aplicación de Posicast/ IS de orden superior al problema del péndulo doble mediante un sistema de control basado en modelo de referencia (Fujioka & Singhose, 2018). También se realiza un interesante estudio sobre la aplicación de Posicast en casos en donde las condiciones iniciales son diferentes de cero (Esquivel & Tello, 2008).
En la subcategoría "Artículos de Aplicaciones", se puede encontrar que Posicast se ha aplicado como elemento central de estudio en 5 áreas específicas: las de tipo mecánico, las de tipo electromecánico, robótica, en electrónica de potencia y en microelectrónica. Posicast y sus versiones mejoradas han tenido aplicación relevante en problemas mecánicos y de control de movimiento en máquinas y herramientas (Singh & Singhose, 2002; Arolovich, 2014; Kucera & Hromcik, 2011a; Kucera & Hromcik, 2011b; Singh & Vadali, 1993; N. C. Singer & Seering, 1990; Y Yildiz et al., 2007; N. Singer, 1989; Jasper & Schaub, 2014; Cutforth & Pao, 2002; Peter Háuptle et al., 2011; Kojima & Singhose, 2007; Y Yildiz et al., 2007). Existen revisiones desarrolladas al respecto (Singhose, 2009). También se ha aplicado Posicast en el control electromecánico (P Háuptle et al., 2011; Masoudi & Feyzi, 2009; Morshed & Fekih, 2016; Nakano et al., 1989; K. Abidi et al., 2016; Duarte et al., 2016) y en robótica (K Abidi et al., 2015). Si bien se han citado la mayoría de los artículos hallados relevantes, no se han citado todos por cuestiones de espacio, sólo los que se consideraron más interesantes de cada aplicación.
Son 17 (10.6 % de todo lo hallado) los trabajos relacionados con las aplicaciones en microelectrónica y electrónica de potencia, que son las descritas en esta revisión, las cuales se presentarán en una sección posterior, buscando precisamente promover la aplicación de Posicast/IS en el diseño de sistemas electrónicos.
1. Conformación de entrada (INPUT SHAPING)
1. Conformación de Modo Simple (ZV)
Cuando un sistema tiene una única vibración idéntica como respuesta a un comando de entrada escalón unitario, esta puede ser eliminada por medio de la conformación de modo simple de la señal de entrada. Precisamente fue la primera forma de IS utilizada, y corresponde al control Posicast de Smith (1957), al cual se denomina Posicast clásico. La técnica consiste en dividir la señal de referencia en dos partes. El tamaño de los escalones y el retardo antes de introducir el segundo escalón son derivados de la dinámica del sistema. Singer propone la idea conocida como impulse shaping, que consiste en hacer la conformación con base en señales impulso. El objetivo buscado con esto es generar señales de comando que entreguen energía cero al sistema en las frecuencias a las cuales podría vibrar. A fin de asegurar la energía cero en las frecuencias de vibración, las señales comandos deben ser modificadas o conformadas antes de ser introducidas al sistema, de allí el nombre de Input Shaping. Una vez el comando correcto es conseguido, el resultado será un sistema que no tiene energía en las frecuencias de vibración, por tanto no vibra y no presenta sobre-impulso (Singhose et al., 1997).
El proceso consiste en la realización de una convolución de la señal de comando con señales impulsos. Se usa una serie de impulso, los cuales causan vibración cero en el sistema (Kojima & Singhose, 2007). La respuesta de un sistema de segundo orden a un impulso está dada por la siguiente ecuación (Singer & Seering, 1990):
Ecuación N° 1
Donde yi(t) es la salida del sistema, A i es la amplitud de los impulsos y t i es el tiempo de ocurrencia de los impulsos. La frecuencia de vibración o natural del sistema es ω, y α el coeficiente de amortiguamiento. Tratándose de un sistema lineal, la respuesta total a una serie de N impulsos puede ser expresada como una de las respuestas a cada impuso "i". La magnitud de la respuesta total inmediatamente después del impulso número N está dada por (Singh & Singhose, 2002):
Ecuación N° (2)
Un tren de impulsos apropiadamente ordenado puede suprimir la vibración residual forzando a que Amp sea igual a cero. Eso solo puede ocurrir cuando ambos términos, seno y coseno, son iguales a cero.
Un conformador de entrada ZV es el más simple y tiene la forma de amplitudes impulso A i y tiempo t i. Un conformador de este tipo es comúnmente usado en situaciones donde los parámetros del sistema son conocidos con un alto nivel de exactitud. En todo caso, si no se confía en esta aproximación de IS, su aplicación no aumentará las vibraciones del sistema más allá del nivel que ya tenían antes de realizar la conformación de la entrada. El principio de este IS gira en torno a dos condiciones: vibración cero y tiempo de respuesta mínimo, las cuales se expresan según las siguientes ecuaciones (Hyde & Seering, 1991):
Ecuación N° 3
Ecuación N° 4
La primera es simplemente una especificación de origen, y la segunda es una restricción de normalización.
Conformador de Orden Superior (ZVD y ZVDD)
Dentro de los conformadores de orden superior se encuentran ZVD y ZVDD. Un conformador ZVD es un esquema de generación de comandos diseñado para hacer el proceso de conformación de entrada más robusto al error en el modelamiento del sistema. Se introduce una restricción a la formulación del conformador que consiste en establecer la derivada de la vibración con respecto a la frecuencia también igual a cero. Esta condición se expresa matemáticamente mediante las siguientes ecuaciones (Hyde & Seering, 1991):
Ecuación N° 5
Ecuación N° 6
Si las inexactitudes del modelo no pueden ser controladas con un conformador ZVD, entonces se deben usar otras técnicas de conformación que se encuentran disponibles, que se comentarán a continuación.
Es posible generar un conformador más robusto usando una restricción adicional. Esta consiste en hacer la segunda derivada de la ecuación de vibración residual igual a cero. El conformador resultante de satisfacer esta restricción es llamado ZVDD (Zero Vibration and Derivative Derivative). Esta restricción adicional incrementa la robustez del sistema, pero también incrementa la duración de la conformación por medio periodo de la vibración (Singhose et al., 1997).
El conformador ZVDD consiste en 4 impulsos uniformemente espaciados que duran 1.5 periodos de vibración (Singhose et al., 1997). Se consigue con 3 conformadores ZV convolucionados. En la tabla N° 1 se condensan las ecuaciones que permiten determinar las amplitudes de las señales impulso y los tiempos de ocurrencia de los mismos (Singer, 1989).
Tabla 1 Ecuaciones para determinar los valores de las amplitudes y los tiempos de los impulsos.
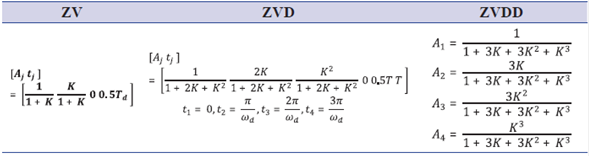
Fuente: elaborada por los autores con información de Singer, 1989.
En estas ecuaciones
2. Posicast clásico
Posicast fue originalmente propuesto por Smith (1957). Este autor demostró cómo un conocimiento exacto del amortiguamiento de un sistema y la frecuencia natural amortiguada podría ser utilizado para diseñar un compensador dinámico de lazo abierto que cancela el sobre-impulso en la respuesta al escalón unitario de los sistemas (Cook & Smith, 1966). Posicast corresponde al conformador ZV, explicado en la sección anterior, pero Smith maneja un enfoque diferente.
La estructura analítica de Posicast puede ser explicada usando la respuesta al escalón unitario, mostrada en la figura N° 2, y el diagrama de bloques mostrado en la figura N° 3.
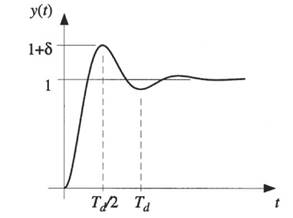
Fuente: Adaptado de Hung, 2003.
Figura 2 Respuesta al escalón unitario de un sistema ligeramente amortiguado.
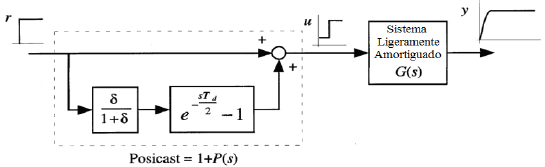
Posicast es la parte encerrada por la curva con líneas discontinuas, y está dada por la función 1 + P(s), donde P(s) es:
Ecuación N° 7
Los parámetros de la función P(s) son el sobre-impulso de la respuesta al escalón δ y el periodo de la respuesta amortiguada T d. El sistema Posicast 1 + P(s), básicamente divide la señal de referencia escalón en dos partes, que corresponden con los 2 impulsos del conformador ZV.
Un Posicast es equivalente a un filtro todo-cero, con un conjunto infinito de ceros espaciados en los múltiplos impares de la frecuencia natural amortiguada (Cook, 1966). Resolviendo para las raíces del polinomio 1 + P(s) = 0, s = σ + j ω con se obtienen las siguientes relaciones (González et al., 2013):
Ecuación N° 8
Ecuación N° 9
El primer par de ceros cancelan el par de polos dominantes en el sistema ligeramente amortiguado G (s). La efectividad de Posicast se basa en la cancelación de polos y ceros, por lo que un conocimiento inexacto de los polos dominantes de la planta dará lugar a la oscilación residual. Esta es la razón por la cual, Posicast no ha sido ampliamente usado en la práctica. Sin embargo, Posicast no es lo mismo que la cancelación de polos por medio de inversión de modelo, por ello, Singer y Seering (1990) propusieron un método para reducir la sensibilidad; este método ha sido interpretado como una versión extendida o de alto orden de Posicast, teniendo más de un paso. Esto fue explicado en la sección anterior como conformadores ZVD y ZVDD.
3. Posicast Realimentado
A partir de una revisión bibliográfica, Hung (2002) advierte que Posicast y sus variaciones han sido utilizadas exclusivamente como compensación de lazo abierto para sistemas ligeramente amortiguados. Por tanto, propone combinar Posicast con esquemas de control realimentado clásicos, específicamente PID. De allí surge un esquema de control hibrido que tiene la ventaja del desempeño de amortiguamiento superior de Posicast, mientras reduce la sensibilidad paramétrica y de carga a través de la realimentación. El bloque Posicast se coloca entre el controlador PID y el sistema a controlar. Mientras aplicaciones previas colocan Posicast antes del sistema ligeramente amortiguado, la propuesta de Hung (2002) sugiere usarlo dentro de un sistema realimentado.
El método de control propuesto es una desviación significativa del Posicast clásico. Se debe destacar que las características polinómicas del sistema general usando Posicast clásico se encuentran removiendo los polos dominantes ligeramente amortiguados de G (s). En el método hibrido de Hung, las características polinómicas de lazo cerrado están dada por 1+C(s) [1+P(s)]G(s). La propuesta primaria de la función Posicast es cancelar los polos indeseables de la planta, minimizando por tanto el efecto de los polos ligeramente amortiguados en la respuesta de lazo cerrado. Los polos del sistema de lazo cerrado podrían ser determinados por los polos y ceros remanentes de lazo abierto. Un compensador C(s) apropiadamente diseñado reduce el efecto de compensación Posicast imperfecta.
El método de diseño para el sistema hibrido tiene dos pasos. El primero, es el diseño de la función P(s) para el sistema G (s), ligeramente amortiguado. Para Posicast clásico son requeridos dos parámetros de la respuesta al escalón unitario de lazo abierto: el sobre-impulso δ y el tiempo de ocurrencia del primer pico T d . El segundo paso, es el diseño del controlador realimentado C(s) basado en el modelo combinado [1+P(s)]G(s).Hung sugiere usar técnicas clásicas del dominio de la frecuencia. Finalmente, Hung (2003) realiza un análisis de sensibilidad de Posicast a los parámetros del sistema, para demostrar su robustez.
Aplicaciones de Posicast en el diseño electrónico
2. Microelectrónica
Rasoulzadeh & Ghaznavi-Ghoushchi (2009) y Rasoulzadeh (2010) presentan el desarrollo de un Input Shapers de tipo Posicast clásico y su implementación en un circuito de tecnología CMOS. Como ya es sabido, los bloques esenciales de Posicast son un elemento de escalamiento y retardo, y un sumador. En el artículo se presenta una propuesta de diseño de cada uno de estos elementos a nivel de circuito, en tecnología CMOS.
En Posicast el escalamiento y el retardo dependen del sistema en particular al cual se le va a aplicar. Para el caso, el sistema objetivo es un amplificador operacional de dos etapas en tecnología CMOS, el cual se comporta como un sistema ligeramente amortiguado, presentando sobre-impulso en su respuesta a la entrada escalón, y presenta distorsión cuando trabaja con señales de pulsos. Como el objetivo buscado es mejorar la estabilidad del operacional cuando es realimentado, así como su rapidez de respuesta, se miden antes y después de usar Posicast tanto el sobre-impulso como el tiempo de establecimiento. Los resultados en la tabla N° 2, cuando se ha aplicado una señal de pulso (con flanco positivo y negativo).
Tabla 2 Sobre-impulso y tiempo de establecimiento de amplificador operacional.
| Para una entrada pulso | Flanco Positivo | Flanco Negativo |
| Sin Posicast | Sobre-impulso: 25 % Tiempo de establecimiento: 205 ns. | Sobre-impulso: 24 % Tiempo de establecimiento: 253 ns. |
| Con Posicast | Sobre-impulso: 1 % Tiempo de establecimiento: 34 ns. | Sobre-impulso: 1 % Tiempo de establecimiento: 99 ns. |
Fuente: elaborado por los autores con datos de Rasoulzadeh y Ghaznavi-Ghoushchi, 2009.
Los mismos autores toman el Posicast implementado y lo aplican a un par de amplificadores operacionales CMOS, uno de dos etapas y otro de tres etapas (Rasoulzadeh, 2009). En la tabla N° 3 se presentan los resultados para una entrada escalón unitario. Además, los autores estudian el efecto que tienen las imperfecciones de los dispositivos electrónicos con los que se implementan los elementos de Posicast, en la respuesta del sistema, tales como variaciones en las características de los transistores, efectos parásitos, entre otros.
Tabla N° 3. Sobre-impulso y tiempo de establecimiento de amplificadores operacionales.
| Para una entrada escalón | Amp. Op. de dos etapas | Amp. Op. de tres etapas |
| Sin Posicast | Sobre-impulso: 23 %. Tiempo de establecimiento: 286 ns. | Sobre-impulso: 39 %. Tiempo de establecimiento: 52 ns. |
| Con Posicast | Sobre-impulso: 1 %. Tiempo de establecimiento: 62 ns. | Sobre-impulso: 1 % Tiempo de establecimiento: 8 ns. |
Fuente: elaborado por los autores con datos de Rasoulzadeh, 2009
Los resultados obtenidos por los autores evidencian como la efectividad de Posicast, eliminando el sobre-impulso y mejorando el tiempo de establecimiento, se ve reducida en la medida en que el bloque Posicast se aleja del comportamiento ideal. Los efectos más severos ocurren cuando las variaciones se dan en el bloque de escalamiento. Los menos severos cuando las variaciones están en el bloque de retardo (Rasoulzadeh, 2009).
Finalmente, se introduce un Posicast programable (Rahimi, 2012). Se trata de una solución en las que los niveles del comando Posicast (determinados por), así como el tiempo relativo de ocurrencia de las dos partes del comando (determinado por), los establece el usuario del sistema mediante unas palabras de código, según sus necesidades de aplicación correspondiente con las características del sistema ligeramente amortiguado. Se trata de un dispositivo hecho de tecnología CMOS.
Siguiendo esta misma línea, Simancas-García et al. (2019) aplicaron Posicast al diseño de filtros activos usados en los sistemas de acondicionamiento de señal en aplicaciones de instrumentación en donde se trabaja con señales de pulsos, tales como los Encoders utilizados en la detección de movimiento y medición de velocidad en motores eléctricos (Maloney, 2004). Los filtros que tienen la respuesta en frecuencia más selectiva tienden a distorsionar las señales pulsadas con sobre-impulsos. Esto tiene implicaciones negativas en el funcionamiento de los sistemas/circuitos involucrados. Lo anterior obliga a los diseñadores a utilizar filtros menos selectivos. La solución aportada mediante el uso de Posicast en los filtros más selectivos, elimina las distorsiones introducidas por estos, y libera a los diseñadores de la obligación de usar filtros menos selectivos.
3. Electrónica de Potencia
Posicast ha encontrado su principal aplicación, dentro de la electrónica de potencia, en los convertidores CC-CC. Estos circuitos permiten tomar un valor de voltaje CC y convertirlo en otro valor CC, sea este último mayor o menor que el original. Las aplicaciones de los convertidores son: control de motores eléctricos, en sistemas de grúas, trenes y montacargas (Valderrama & Vega, 2013). Cuando el voltaje de salida es menor que el voltaje de entrada, se trata de un convertidor CC reductor o tipo Buck. Si el voltaje de salida es mayor que el original, se trata de un convertidor CC elevador o tipo Boost.
Los convertidores de potencia son sistemas no lineales en los cuales la frecuencia natural amortiguada es fuertemente dependiente de la carga. Cuando se modelan estos convertidores y se realiza su simulación en Matlab®, se puede observar su comportamiento como sistemas críticamente amortiguados, que exhiben un comportamiento con múltiples oscilaciones antes de alcanzar el estado estable (Kumar & Jeevananthan, 2011). De hecho, controlar este comportamiento es uno de los desafíos relevantes en el diseño de convertidores.
Las técnicas de control convencional, por ejemplo, PID, logran mitigar ligeramente estas oscilaciones, exhibiendo el comportamiento de un sistema ligeramente amortiguado. Los resultados muestran sobre-impulsos en la salida del convertidor CC-CC para diferentes voltajes de entrada, usando un controlador PID convencional. Hung (2002) encontró la manera de eliminar este comportamiento mediante el controlador hibrido con Posicast, aplicado tanto a convertidores reductores como elevadores, realizando pruebas al sistema para diferentes parámetros de carga y condiciones de operación.
Posteriormente, Feng, Hung, y Nelms (2003) realizan dos implementaciones digitales del controlador hibrido; fue aplicado a un convertidores elevadores y reductores (Feng et al., 2006). Las implementaciones se materializaron mediante el uso de Procesadores Digitales de Señales (DSP, Digital Signal Processors). En estos trabajos no hubo una preocupación exclusiva por el sobre-impulso, sino que se investigaron también los efectos de la variación de los parámetros del controlador clásico () en la respuesta de los convertidores. Para los casos, el controlador es un integrador con función de transferencia. En los resultados de ese artículo se observa la respuesta del convertidor para diferentes valores de K, y se evidencia como aparecen sobre-impulsos en el voltaje de salida a medida que aumenta K.
También estuvieron interesados en investigar los efectos que tienen las variaciones en los parámetros del sistema Posicast sobre la respuesta del convertidor CC-CC, y. La sensibilidad observada es mínima. La respuesta se mantiene aceptable cuando se compara con la respuesta obtenida sin el uso de Posicast.
Finalmente, observaron los efectos de los cambios en la carga del convertidor CC-CC, para inspeccionar la sensibilidad del sistema variaciones en la carga, una situación normal durante la operación de cualquier sistema de potencia como el estudiado en estos trabajos. Esto último permite evidenciar un mejor desempeño ante variaciones de carga cuando se le compara con su contraparte basada en PID convencional. Se puede concluir de lo observado que el convertidor usando el controlador hibrido de Hung es más sensible a variaciones en el controlador-integrador que a los parámetros Posicast o a la carga misma.
Adicional a todo lo dicho, ventajas adicionales se han observado experimentalmente entre las que se incluyen mejora en la respuesta en frecuencia de los controladores PID y mejora en el margen de ganancia de los mismos (Feng et al., 2003).
Cuando se requiere que el voltaje de salida del convertidor no sea exclusivamente mayor o menor que el voltaje de entrada, entonces se utiliza uno tipo SEPIC (Single Ended Primary Inductor Converter), el cual permite obtener una salida mayor, menor o igual a la entrada, según las necesidades de la aplicación (Kalantar, 2010).
Al igual que en los convertidores convencionales, los SEPIC tienen el comportamiento oscilatorio en principio, que se va amortiguando con el paso del tiempo. También es compensado mediante controladores PID convencionales, que no suprimen el comportamiento ligeramente oscilatorio. Por lo anterior, son también aptos para aplicar controladores híbridos con Posicast. En Kalantar (2010) los autores compensan un SEPIC con controlador hibrido con Posicast. Sin embargo, sólo se concentran en la eliminación del sobre-impulso, y al análisis comparativo con convertidores compensados con PID convencional.
Conclusiones
Los conformadores de entrada en sus múltiples versiones se han utilizado por años en sistemas mecánicos y electromecánicos, en donde se requiere control de movimiento, para eliminar las vibraciones propias de los mecanismos cuando son sometidos a señales de control con cambios abruptos, teniendo en cuenta que existen múltiples sistemas que tienen un comportamiento ligeramente amortiguado. En este trabajo se presentan los más representativos, ZV (Posicast), ZVD y ZVDD. Las desventajas de ZV dieron lugar al surgimiento de ZVD y ZVDD.
En el año 2002 aparece una versión mejorada del conformador Posicast en un sistema electrónico de potencia, específicamente, convertidores CC-CC. Se utiliza Posicast en el interior del lazo de realimentación PID que normalmente se usa en estos circuitos de potencia. Esta solución permite salvar algunas de las desventajas que ha presentado Posicast, y que dio origen al desarrollo de conformadores de orden superior. Lo anterior motivó a otros autores a utilizar Posicast para mejorar sus convertidores.
Para el año 2009, ya había investigadores desarrollando versiones microelectrónicas de Posicast, con bloques funcionales analógicos que realizan la función de escalamiento y retardo de las señales de control, e implementándolas para solucionar problemas en sistemas microelectrónicos.
Dados los buenos resultados de utilizar la conformación de entrada para mejorar los sistemas electrónicos que presentan vibraciones en sus salidas, se establece una senda para explorar nuevas aplicaciones que resulten de interés para los investigadores en diseño de sistemas electrónicos.

