











 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
PermalinkIntroduction
Proprioception was first explained as the result of specific sensorial receptors located in deep body tissue. In the present study, proprioception will be approached through an integrated account that considers the conjoint operation of different neuroanatomical structures and complex executive command. The use of perceptual illusions has helped to shape the path for this integrated view (e.g. Ehrsson, 2007; Guterstam, Bjõrnsdotter, Gentile, & Ehrsson, 2015). In the specific case of proprioception, the Rubber Hand Illusion (RHI) experiment (Botvinick & Cohen, 1998) clearly conveys the notion of multiple processes acting conjointly to produce proprioception. This paper will be developed in three sections: (1) a general description of the experimental conditions required to produce the RHI; (2) a brief review of neurocognitive and physiological evidence supporting the integrated account of proprioception in the RHI; and (3) the use of actions within the RHI setting that help to elucidate the multisensory integrated account.
The Rubber Hand Illusion - General experimental conditions of occurrence
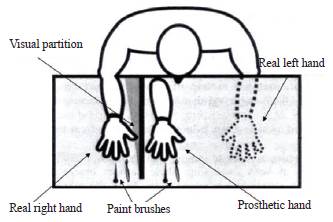
Botvinick and Cohen (1998) carried out an experiment called the Rubber Hand Illusion (RHI) to evaluate intermodal proprioceptive integration by producing tactile sensations and synchronous visualization of touch in the limbs (figure 1). They produced a perceptual illusion by simultaneously stroking subjects' real hands and prosthetic rubber hand in the view of subjects. Participants recognized the rubber hand as their own hand after approximately half a minute of synchronous stroking. Although Botvinick and Cohen's results did not provide evidence regarding which brain areas were activated during intermodal correlation, they indicated that simple stimuli pairing may be sufficient to create self-attribution of prosthetic body parts.
The Rubber Hand Illusion was first explained as a recalibration of real hand proprioception to the false hand as a consequence of a distortion in the interaction of visual, tactile, and proprioceptual sensation (Botvinick & Cohen, 1998). Propriocep-tion has long proved to play an important role in guiding body representation and is considered the dominant sensory input to the on-line sef-represen-tation of the body in space (Shenton, Schwoebel & Coslett, 2004). The RHI model has been used since 1998 as a tool to investigate the basis of proprioception and space perception overall, especially in the conjunction of visual and tactile systems. Alternative explanations for the extent of proprioceptive recalibration observed in rhi have recently been invoked, however, including the role of socio-emotional processes (Van Stralen et al., 2014) and previous interoceptive sensitivity regarding body ownership (Suzuki, Garfinkel, Critchley, & Seth, 2013). These investigations have demonstrated that the proprioceptive recalibration process observed in RHI cannot be regarded as the product of exteroceptive pairing of visual and tactile inputs alone. Other sources of sensory information such as cardiac feedback and affective processing may lead to a better understanding of proprioceptive recalibration.
Ehrsson et al. (2008) investigated the RHI among subjects who had undergone hemilateral upper limb amputation. Their research sought to determine if the illusion created among this population would be similar to the effect produced among non-amputees. Their research hypothesis was that the somatosensory cortex would be greatly activated during RHI in the amputee group. Taking into account the phantom limb syndrome usually observed in amputees, the researchers thought that having an amputated limb could result in an even more realistic representational replacement of the arm through the RHI. Their results corroborated the stronger illusion hypothesis among amputees compared to the control group. When comparing the illusion effect between preserved arms and amputated arms among amputee subjects, however, the results did not support the existence of significant differences. In fact, the RHI was weaker in amputated limbs. Interestingly, results have shown that the more recent the amputation, the stronger the illusion. This specific finding suggests a progressive adaptation of body schema to the new post-amputation body condition.
In another experiment with amputated subjects called "mirror illusion" (Ramachandram & Rog-ers-Ramachandram, 1996), the effect of replacing a phantom limb with a mirror reflex of the preserved limb is explained as the main result of a visual overlap rather than a tactile effect. Mirror illusion findings suggest a synesthesia outcome -a perception of sensorial mixing resulting from conflict between different sensory channels- in which visual orientation can produce a specific sort of tactile sensation. In the context of the RHI experiment, the addition of mirrors rather than a prosthetic hand to produce a recalibration of ownership did not by itself prove to be a reliable variable in producing a typical RHI effect (Ber-tamini, Berselli, Bode, Lawson, & Wong, 2011). Mirrors induced recalibration, but not feelings of ownership towards false hands as in earlier RHI experiments. This indicated that tactile input, not visual information alone, remained a crucial factor for producing the illusion.
Ehrsson, Spence and Passinham (2004) found evidence that the occurrence of the RHI was conditioned by synchronous stroking of the real hand and the rubber hand. Overall, 80 % of participants reported the expected illusion within an interval of 15 seconds of synchronous stroking (Ehrsson, Holmes, & Passingham, 2005). Asynchronous stroking diminishes the effect or even eliminates the proprioceptive illusion as a consequence of the time delay between feeling and seeing the touch (Shimada, Suzuki, Yoda, & Hayashi, 2014). While visuotactile synchronicity in stimulation is a preponderant factor in the illusion, it cannot by itself explain the proprioceptive recalibration.
Tsakiris and Haggard (2005) demonstrated that the illusion effect is significantly diminished or even eliminated, despite synchronous stroking, when the position or laterality of the rubber hand are incompatible with the orientation of the real hand being synchronously stimulated by stroking. The illusion effect is extinguished, for example, when the real right hand and a prosthetic left hand are stroked simultaneously. Holmes, Snijder and Spence (2006) corroborated this result, demonstrating that minimally incongruent positions of the rubber hand compared to the real hand being stroked reduced the strength of the illusion (e.g. by turning the false hand 15° or more to the left or right side of the body). In addition, the RHI is not produced if a rubber hand in front of the body crosses the body midline (an imaginary vertical division between the left and right sides of the body) toward the non-stimulated hand (Cadieux, Whitworth, & Shore, 2011). This evidence indicates that previous representations and expectations of body image can also have a significant effect on proprioceptive recalibration (Constantini & Haggard, 2007).
Haans, Ijsselsteijn and Kort (2008) found that the resemblance between the artificial hand and the real hand is equally important to the strength of the illusion. According to these researchers, the visually perceived skin texture of the rubber hand is the most important independent variable in producing the RHI. They found that variables such as skin color, perceived gender-specific features of the hand, or hand size did not directly or significantly interfere with the production of the illusion. On the other hand, prosthetic hands manufactured from wooden or metallic materials did not efficiently reproduce the typical propriocep-tive drift. Synthetic materials resembling human skin, especially those manufactured from rubber derivatives, are the ideal prosthetic materials for this purpose. Tsakiris, Carpenter, James, and Fo-topoulou (2010) reached the same conclusion by varying stroking conditions and controlling the materials from which false hands were produced. These researchers used a plain block of wood; a wooden hand; and a prosthetic hand with visual features similar to human skin. The prosthetic hand was the only one of the three that produced the expected illusion. In more recent research, Kalckert and Ehrsson (2012) showed that placing surgical gloves on both rubber and real hands produces the same proprioceptive illusion as in traditional RHI experiments.
An innovation in recreating the illusion was the use of an online video projection of the subject's own hand being stimulated. Tsakiris, Prabhu, and Haggard (2006) used online projections of participants' own real hands over a plain black surface as the "rubber hand" variable. The embodiment of the subjects' own real hands through video projections opened up the possibility of testing the RHI in virtual reality contexts. The effectiveness of the paradigm has been attested through different experiments (Ijsselsteijn, DeKort, & Haans, 2006; Slater, Perez-Marcos, Ehrsson, & Sanchez-Vives, 2008) showing that the feeling of ownership is replicated in virtual reality since the body's spatial references are respected, as discussed above.
Blefari, Cipriani, and Carrozza (2011) have reported that today's challenge for neuroprosthet-ics is to produce artificial limbs with "ownership feeling," that can be recognized and felt as naturally as preserved limbs. To meet this goal, it is necessary for prosthetic limbs to appear very similar to real limbs, a condition that favors stable sensorimotor feedback in synchrony with the brain's dynamic patterns. Marasco, Kim, Colgate, Peshkin, and Kuiken (2011) have shown that the rubber hand effect is produced even among amputees with robotic prostheses. Robotic prostheses are connected to the innervated skin of the residual limb, and when induced so do so through rhi experiment procedures, subjects feel the rubber hand to be their own, perceiving the rubber hand to be their robotic hand with the same vivacity as observed in non-amputee samples. The researchers also measured this effect with a variable temperature of the residual innerved limb, finding that real limb temperature significantly and proportionally correlated with the intensity of the illusion effect (Moseley et al., 2008).
These findings controverted the hypothesis that a feeling of ownership can be induced in any neutral object (e.g. a table surface), as suggested by Armel and Ramachandram (2003). This hypothesis inferred that the illusion was the result of Bayesian perceptual learning. In this sense, it suggested that the RHI would result solely from bottom-up mechanisms that link visuotactile events exclusive to stimulation synchronicity. This alternative explanation excluded previous representational knowledge of the body (top-down processes). In the Bayesian hypothesis, psychological concepts such as embodiment or selfhood would be misleading because Bayesian principles of statistical correlation alone should be sufficient to explain why objects extraneous to the body could be embodied regardless of their aesthetics. If so, the RHI would be resistant to top-down knowledge of the body such as self-conscious body representations. This discussion was partially resolved when researchers observed the brain areas involved in manifestations of the RHI and refuted the Bayesian hypothesis, as will be described in the following section.
Neurocognitive and Physiological Evidence in the RHI
Ehrsson et al. (2005) pioneered the investigation of brain areas involved in the rhi. Their results first demonstrated that the illusion effect increases ventral premotor cortex activity, which they interpreted as the feeling of ownership of the rubber hand. They also observed increased activity in the bilateral intraparietal cortex. This region is linked to the proprioceptive recalibration processing of the real hand towards the rubber hand. Another brain structure affected and identified was the cerebellum. Activity in the cerebellum increased proportionally to the intensity of the reported illusion during RHI. These findings corroborated the multisensory hypothesis on proprioception, though it was still not explained how the brain temporally integrates different lobe activations. Nevertheless, the observation of activity in multiple brain regions associated with ownership and pro-prioception during RHI contradicts the thesis that the RHI effect is the simple result of visual pairing interference based on synchronic visual and tactile input, independent of previous body-action representations, i.e. the Armel and Ramachandram (2003) hypothesis. Ehrsson et al. (2005) concluded that RHI encompasses the activity of three neural networks: 1) the multisensory integration of parieto-cerebellar areas; 2) the recalibration of proprioceptive representations for upper limbs in the same circuit as a reach-to-grasp action occurring in the premotor cortex; and 3) a mechanism of body ownership, also in the premotor cortex.
Tsakiris (2010) reviewed the literature on rhi to formulate a neurocognitive model hypothesis based on cumulative neurological findings. The review showed that first, there seems to be a previous representational body model that distinguishes objects that can and cannot be part of the body. Second, the literature indicates that instantaneous anatomical and postural representations of the body modulate the integration of multisensory information and consequently lead to the recalibration of the visual and tactile coordination systems. Third, the referred result of tactile feeling of the rubber hand will lead to the subjective experience that the prosthesis is part of the body. Tsakiris (2010) posits that these processes imply a neural network composed of (a) the right temporo-parietal junction, which tests the non-corporeity of external objects; (b) the secondary somato-sensorial cortex, which sustains an online representation of the body; (c) posterior parietal and ventral premotor cortices that encode information to recalibrate the coordination system of the hand position; and (d) the right posterior insula, which underlies the subjective experience of rubber hand ownership.
The multiple cortical areas explanation is not always clear as to whether the RHI can be understood as completely independent from subcortical activation. Recent research applying variations of the RHI have demonstrated, for example, that the posterior cingulate cortex is involved in body ownership and self-location of objects external to the real body (Guterstam et al., 2015). In addition, Ehrsson, Wiech, Weiskopf, Dolan, and Passing-ham (2007) have shown that physical threats to the rubber hand prosthesis, such as hammering the rubber hand or threatening it with a knife, significantly increase subcortical activity related to anxiety and interoceptive consciousness. Results obtained through functional magnetic resonance imaging (FMRI) indicated that threatening situations increased de activity in the insula and anterior cingulate gyrus. In a similar vein, Novaes, Gama, Melo, Araújo, and Franco (2011) used the experiment to compare the power of the illusion in conditions involving painful stimuli and a control consisting of regular stimulation. They found that the presence of painful stimuli increases the illusion effect in comparison to regular stroking with a paintbrush. This result are parallel to the findings of Ehrsson et al. (2007) on increased insula and cingulate gyrus activity when the rubber hand is threatened.
Although FMRI studies have shown different brain areas related to body ownership and body schema codification, temporal contiguity between tactile and visual stimulation remained an important factor in explaining the RHI effect. Shimada, Fukuda, and Hiraki (2009) demonstrated that the criteria for synchronous and asynchronous stroking follow specific temporal discrepancies. Syn-chronicity of visual and tactile stimulation below 300ms induces stronger feelings of ownership of the rubber hand, whereas a temporal discrepancy beyond 300ms induces progressively weaker ownership towards the rubber hand. As a result, the definition of synchronous and asynchronous stroking must respect specific temporal contingencies. Studies applying electroencephalography (EEG) to RHI pioneered the investigation of temporal contiguity between visual and tactile inputs (Press, Heyes, Haggard, & Eimer, 2008; Sambo & Forster, 2009). The main contribution of these studies beyond the comprehension of temporal discrepancies was the elucidation that proprio-ceptive integration does not rely exclusively on previous representations of body, as suggested by fMRI studies based on the activation of cortical structures. Somatosensory event-related potentials are present in synchronous stimulation before the activation of cortical areas associated with body representation, which means that RHI comprises early stages (somatosensory activation) and later stages (preexisting body representations) of tactile processing.
Using EEG, Blefari et al. (2011) sought to map the electrical channels activated by the illusion that were not studied in previous research using fMRI. The results demonstrated that the frequency of brain electrical activity measured by potential spectral density (PSD), was compatible and proportional to the occurrence of illusion as reported by participants. Specifically, a multisensory activation of electrodes in the frontal, parietal, and central areas of the premotor cortex was registered, corroborating the areas described in some fMRI studies (Ehrsson et al., 2005; Ehrsson et al., 2008). In the same study, no differential electrical activity was found in the referred areas when testing for the asynchronous stroking condition, corroborating subjective reports of no feelings of illusion in this specific condition (Lewis & Lloyd, 2010).
In addition to stimulating increased activity in some brain areas, RHI also affects body temperature. Moseley et al. (2008) observed decreased temperature of the real hand being stimulated as participants 'embodied' the rubber hand, indicating proprioceptive drift and a selective decrease of blood flow in the region. It is important to note that reduced temperature was specific to the limb or hand that was being replaced by the rubber hand. The same did not occur in the non-stimulated real hand, nor in the ipsolateral foot. The authors concluded that rubber hand ownership decreased the tactile processing of the stimulated real hand, an event also observed among patients who report disembodiment of specific body regions after a stroke. Rohde, Wold, Karnath, and Ernst (2013) added evidence regarding the limb cooling effect observed in RHI. They found that if stimulation was applied by a robot arm, the cooling correlate of RHI effect was not observed. The cooling effect was observed only when stimulation was synchronously and manually administered by a researcher, which opens the discussion to other factors of RHI production such as theories of mind and affective processing.
Similarly, Barnsley et al. (2011) demonstrated increased histamine production in the real hand being stimulated during RHI. Histamine is an enzyme associated with the immunological system, the production of which is an innate immune response and is involved in autoimmune disorders like multiple sclerosis. The researchers observed that during RHI, the stimulated real hand produced vasodilatation reactions and reddish papules as a combined reaction to previous histamine injections. In the experiment, histamine injections were administered previously to both stimulated and non-stimulated hands. The observed vaso-dilatation and skin reddening exclusively in the stimulated hand are typical reactions of increased histamine production in the area. The authors concluded that these reactions resulted from increased histamine reactivity due to decreased natural histamine metabolism (RHI direct effect) in the region, a compensation mechanism that also occurs under conditions of immunological defense reaction. Another possible interpretation is the antagonist effect of increased histamine in response to decreased production of compounds responsible for vascular integrity, such as adrenalin. Either way, the findings are consistent with the hypothesis of a preconscious representational matrix in the brain that modulates homeostatic perceptual and immunological mechanisms.
RHI experimental settings evolved toward the investigation of hand-action effect in the proprioceptive drift. In this scenario, the multi-sensory integration account is strengthened as outlined in the following section.
RHI in Action: Active and Passive Movements in Experimental Settings
According to Jones and Lederman (2006), David Katz (1884-1953), Geza Révész (1878-1955), and James Gibson (1904-1979) were the main researchers in the first half of the 20th century to work on the critical role of hand movements in the development of human global perception. Katz offered important evidence on tactile perception and its functional contiguity to visual and auditory perception. Révész investigated shape perception through the hands, studying blind subjects and their manipulation of objects. This field of research came to be known as haptics in the 1990s. Haptics has been described as the study of touch and the human interaction with the external environment through touch (Jütte, 2008). Guided by the work of Katz and Révész, Gibson reinforced the evidence that hands have simultaneous perceptive and executive functions leading to instantaneous recalibration of action and perception. The evolution of this field opened up a broad range of research, from action intention to the motility of hand control and proprioceptive recalibration in reaction to sensory conflict.
In relation to haptics, RHI represents a fertile experimental setting to test associations between proprioception and action control. Tsakiris et al. (2006), for example, argue that the tactile sensation caused by rhi is fragmented and localized, normally restricted to the passive index being stimulated. The authors replicated the experiment in an action setting to evaluate if the distortion produced by RHI is modified when induced by active index finger movements. They wanted to ascertain if putting a stimulated finger into action would extinguish, diminish, or increase the illusion effect, or if the illusion effect would be maintained as in conventional RHI. Participants were exposed to three conditions: (1) voluntary movement of the index finger during stroking; (2) involuntary movement of the index finger during stroking; and (3) a passive, static finger (the control condition). The results indicated that the illusion was restricted to the index finger when stimulation patterns two and three were performed. In stimulation pattern one, the feeling of ownership of the rubber hand spread to the whole hand (active action condition), indicating that motor agency may integrate different parts of the hand in a coherent sense, including non-stimulated regions of the hand.
Kammers et al. (2009) also tested RHI in an action setting. Participants were instructed to provide verbal judgment of the position of their felt index finger after stroking, and point with their non-stimulated hand to the felt position of the stimulated hand. In addition, participants were asked to perform alternate movements with the stimulated hand during stroking, to evaluate the impact of action on their final positional judgment either for pointing with the non-stimulated hand, or their verbal judgment. The main idea of the experiment was to create noise with intervening action on the usual main effect of RHI. Using kin-esthetic equipment on both hands, researchers found that the kinesthetic noise created by pointing movement eliminated the main illusion effect, while only moving the stimulated hand and asking for verbal judgments did not affected the usual rhi. This specific result demonstrates that body movement can either work antagonistically or as an integrator of the illusion, depending on how and where the action performance occurs.
In that sense, DeCastro (2013) illustrated that producing synchronous stimulation when the real hand and the rubber hand are continuously squeezing a tennis ball is not sufficient to create RHI. This researcher had originally used the rhi to understand how proprioceptive recalibration affects numerical estimation in visually tracking peripersonal distances. The research focused on the relation between space perception, active representation of space, and body proprioception. Results showed that synchronous stimulation was the sole independent variable predicting changes in both numerical space estimates and body proprioception. Interestingly, numerical space estimates followed the non-numerical space recalibration of body schema after passive RHI. When participants reported stronger effects of the illusion, space estimation distances were closer to the body midline (rubber hand position).
Kalckert and Ehrsson (2012), also working with an action RHI, tested the distinction between ownership and agency of the rubber hand by putting the real index finger and the rubber hand index finger in motion. Their findings first indicated that asynchronous finger movement on the rubber hand and the real hand extinguished both the feeling of ownership and the feeling of agency of the rubber hand, but this was not the case when the index finger was put into active motion during the experiment. Second, when the fingers were put into motion mechanically (passive action), there was proprioceptive illusion in addition to synchronous moving of the rubber index finger and the real index finger, but there was no feeling of agency of the rubber hand. Finally, when finger movements were both synchronous and voluntary, the observed result was a robust feeling of ownership and a strong feeling of agency of the rubber hand.
They then retested the same setting (Kalck-ert & Ehrsson, 2014) and found that the illusion occurred whether it was elicited by an active or passive index finger movement. The strength of the illusion was not significantly different and the proprioceptive drift was equally strong across the conditions. The observation that the active movement did not improve the illusion does not support the hypothesis that efferent signals associated with voluntary motor commands play a differential role in ownership feelings during rhi. Although other studies (Dummer, Picot-Annand, Neal, & Moore, 2009; Riemer, Kleinbõhl, Hõlzl, & Trojan, 2013) have found stronger proprioceptive drifts in active movement, this could be due to experimental setting designs, such as individual differences in between-group comparisons or manual pointing procedures. Kalckert and Ehrsson (2014) concluded that considering the earlier literature and the present data, active and passive movements elicit equally vivid RHI, and this illusion is as vivid as the classical version induced by passive stroking. On the other hand, even though efferent signals and voluntary motor command do not play a differential role in the ownership illusion, they do play a significant role in the feeling of agency over the rubber hand.
Active manual movements led to some different conclusions compared to previous RHI experiments, when real hands were passively stimulated. Features such as prosthesis size, which were insignificant for the main illusion effect, acquired relevance in action settings. Haggard and Jundi (2009) showed that the bigger the rubber hand presented, the heavier the object being held by the real hand seemed. The research demonstrated that regardless of the real weight of objects being held by rubber hands and real hands, the perception of weight is directly proportional to the size of the rubber hand in action, if within the visual field. Heed et al. (2011) corroborated these findings with research showing that the bigger the prosthesis size, the greater the grasping effort to hold a neutral object. They explained that this correlation was the result of enhanced confidence in proprioceptive information due to distorted visual information represented by wrong hand size. It seems that the brain tries to rely on proprioceptive information, balancing distorted large hand image with stronger grasping. Interpreting this effect, Haggard and Jundi (2009) affirmed that body self-representation provides references for comparison to compensate for illusory perceptions of objects outside the body.
In line with proprioceptive drift studies, Honma et al. (2014) tested whether subjective feelings of ownership and proprioceptive drift measured by active reaching movements were resistant to sleep. They assessed learning indexes of participants after routine and repetitive daily exposure to RHI. Their results indicated that subjective ownership remained stable and proprioceptive drift increased with daily training, showing increased performance in reaching movements. Proprioceptive drift -but not subjective ownership- was significantly attenuated after sleep. These researchers concluded that although repetitive RHI training facilitates multi-sensory integration and physiological habituation to an incongruent multisensory environment, sleep corrects illusional integration and habituation of proprioceptive drift. Subjective ownership of a rubber hand seemed to be a stable and resistant process, unlike the active use of non-stimulated effectors to incorporate incongruent multisensory environments. Still, current findings in sensory feedback demonstrate a promising line of research in the active use of prosthetic hands by upper limb amputees (Antfolk et al., 2013). The challenge in this field is to translate sensory feedback systems between tactile sensation and action control into routine long term use.
Concluding Remarks
Even though RHI is just a perceptual illusion, it illustrates that body and brain interact to create a consistent and coherent sense of body integrality. Our review has shown that RHI was first created as a simple tool to demonstrate the relationship between visual and tactile systems. It has developed over the last decade, however, into a useful experimental setting for investigating complex brain networks and the interplay between action and perception. It has evolved into a central site for a broad theoretical discussion about underlying body representation, the empirical basis for pro-prioception, and the extension of brain plasticity.
Repercussions of RHI applications in clinical neuroscience are well described in a review by Ramakonar, Franz, and Lind (2011). Their study compares effects observed in RHI to similar conditions of paresthesia resulting from strokes, or temporary paresthesia resulting from drug and alcohol abuse. The rehabilitation of amputees is also a focus of the review, which discusses how knowledge of RHI mechanisms can be useful in the adaptation to prosthetic limbs. Nicolelis (2011) has mentioned rhi as a breakthrough experiment, of great relevance to the machine-human rehabilitation field, especially because it has provided descriptions of brain networks associated with different sensory processes.
Christ and Reiner (2014) also shed light on possible applications of rhi in non-invasive rehabilitation, emphasizing the need for technological evolution in order to exploit information derived from RHI experiments to meet the demands of immersive virtual rehabilitation. In this sense it is important to note that rhi assessment offers potential new avenues for developing effective rehabilitation and stimulation programs.
RHI experimentation may be applied to purposes ranging from the teaching of basic psychological processes to neuropsychological and clinical rehabilitation contexts. Its richness resides in the unexpected implications that a simple experiment can bring to the mainstream discussion regarding the nature of mind and body relationships. In this case, the postulation of an integrated account for proprioception including brain, body, and perceptual space recalls current debates over the definition and study of embodied cognition (Wilson & Golonka, 2013) in which RHI is directly involved (e.g. Longo, Schüür, Kammers, Tsakiris, & Haggard, 2008). Recent technology and new methods for the study of embodied cognition and the action-perception axis may benefit from the use of rhi experiments and should be addressed specifically in a future review.

