










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkEarth Sciences Research Journal
versão impressa ISSN 1794-6190
Earth Sci. Res. J. vol.19 no.2 Bogotá jul./dez. 2015
https://doi.org/10.15446/esrj.v19n2.51218
http://dx.doi.org/10.15446/esrj.v19n2.51218.
GEODESY
Performance of Single Base RTK GNSS Method versus Network RTK
Desempeño de un Método de Navegación Cinética Satelital en Tiempo Real (RTK) de una Sola Base en Comparación de un Sistema RTK
Nedim Onur Aykut*1, Engin Gülal1, Burak Akpinar1
1 Yıldız Technical Univesity, Department of Geomatics Engineering, Esenler, Istanbul, Turkey
Record
Manuscript received: 12/06/2015 Accepted for publication: 28/07/2015
How to cite item
Aykut, O.A., Gülal E., and Akpinar B. (2015). Performance of Single Base RTK GNSS Method versus Network RTK. Earth Sciences Research Journal, 19(2) 135 - 139. http://dx.doi.org/10.15446/esrj.v19n2.51218.
ABSTRACT
After the late 1990s, GNSS/GPS network RTK technology has become the preferred technique in the world, today widely used in various applications such as monitoring, early warning systems, and mapping and engineering applications. By the end of 2008, the CORS-TR network was being used for engineering applications to determine 3D positions across the whole of Turkey. On the other hand, single base RTK stations are being operated in Turkey. The YLDZ is one of these types of stations. It was established at the Yıldız Technical University by the Department of Geomatic Engineering in 2012. In this paper, the performance of the YLDZ station is examined by use of measurements in 5 Istanbul GPS Triangulation Network (IGNA) benchmark points, with five repeatability measurements up to 50 km from the station. The CORS-TR network RTK solution is used at the same points, and the results are compared. The measured coordinates produced by the two RTK solutions are compared with the IGNA point coordinates. Satellite geometry, initialisation time and the standard deviation of repeatability are also determined. The differences between measured and known coordinates are calculated as 1-2 cm horizontally and close to 3 cm vertically using the YLDZ single base RTK method.
Keywords: RTK GNSS, CORS, Single Base RTK
RESUMEN
Después de la década de los 90, el Sistema Global de Navegación por satélite/Sistema de Posicionamiento Global (GNSS/GPS, en inglés), basado en tecnología de Navegación Cinética Satelital en Tiempo Real (RTK, del inglés Real Time Kinematic) se convirtió en la técnica preferida en el mundo y que todavía se utiliza en varias aplicaciones como el monitoreo, sistemas de alerta temprana y mapeo e ingeniería de aplicativos. Para finales de 2008, los aplicativos de ingeniería utilizan la red de Estaciones de Referencia de Funcionamiento Continuo (CORS-TR, un proyecto establecido en Turquía) para determinar posiciones en tres dimensiones a lo largo del territorio turco. Por otro lado, las estaciones RTK de una sola base han funcionado en Turquía. La YLDZ es una estación de este tipo que fue establecida en la Universidad Técnica de Yildiz por el departamento de Ingeniería Geomática en 2012. En este trabajo se examina el desempeño de la estación YLDZ a través de la medición de cinco puntos de referencia del Sistema de Triangulación GPS de Estambul (IGNA, en inglés) con cinco mediciones repetitivas a más de 50 km de la estación. Similares medidas RTK se hicieron con la red CORS-TR y se compararon los resultados. Las dos mediciones producidas por las soluciones RTK se compararon con los puntos de coordenadas IGNA. También se determinó la geometría satelital, el tiempo de inicialización y la desviación estándar de la repetibilidad. Las diferencias entre las coordenadas medidas y las coordenadas conocidas se calcularon en un rango de 1-2 centímetros horizontalmente y cerca de 3 centímetros verticalmente para la estación YLDZ con el método RTK.
Palabras clave: Navegación Cinética Satelital en Tiempo Real, Sistema global de Navegación por Satélite, estaciones de referencia de funcionamiento continuo, base única RTK.
Introduction
Global Navigation Satellite Systems (GNSS) provides various kinematic and post processing methods of positioning solutions (Feng and Wang 2008). Different real-time kinematic (RTK) GNSS methods have been used for determining the position of any point on the globe. The differential GNSS method has been used since 1980, although rather for navigation applications, using pseudo-range data with the position accuracy of sub-metres. Carrier phase data has been used in real time kinematic applications since 1990 to increase the position accuracy at a centimetre level (Langley 1998). Both of these methods require at least two receivers. One receiver is the reference, the other is the rover. The correction data is transmitted by radio wave or satellite communication. A typical RTK GPS accuracy may be given as 8 mm + 1 ppm horizontally and 15 mm + 1 ppm vertically (Spectra Precision, manual). This accuracy varies depending upon the distance between the reference and moving receiver. The limitation of RTK is due to distance-dependent biases, such as orbit bias, ionosphere bias and troposphere bias (Rizos and Han 2003). This restricts the distance to 10 kilometres or less. The Network RTK (NRTK) - or Continuously Operating Reference Stations (CORS) - has been developed to overcome the distance dependency by using a network of GNSS reference stations spread over a wide area (Rizos 2003). In Turkey, the CORS TR Network has been used in the operation of 150 reference stations since 2008.
Single Base RTK GNSS
At least two receivers are required for classical or single base RTK survey. The first receiver is the base receiver, which is fixed to a point with known coordinates. The other receiver is the rover, used for measuring the unknown coordinates of the points in real time. There is a communication link between both receivers to send corrections from base to the rover receiver by radio waves or GSM links.
The real time kinematic GNSS employs a method of carrier phase differential GNSS positioning, whereby users can obtain centimetre level position accuracy in real time (Langley 1998). The number of full waves between the receiver and satellite cannot be accounted for at the initial signal acquisition (Xu 2007). The ambiguous number of these waves in carrier phase measurement is resolved by on-the-fly (OTF) techniques in real time (Hu et al. 2003). The pseudo-range phase is measured at the base station A at epoch t0 may be represented by the equation given below (Hoffmann et al. 2008):

 is the geometric range,
is the geometric range,  is the satellite-receiver dependent bias, is satellite dependent only,
is the satellite-receiver dependent bias, is satellite dependent only, is receiver dependent only.
is receiver dependent only.  is the phase ambiguity.
is the phase ambiguity.

Described in equation 2 are the results for corrected phase ranges where  is the difference of phase ambiguities. The point positioning at the rover site B is performed with the corrected pseudo-range phase (Hoffmann et al. 2008).
is the difference of phase ambiguities. The point positioning at the rover site B is performed with the corrected pseudo-range phase (Hoffmann et al. 2008).
The YLDZ single base RTK station is operated by the Department of Geomatic Engineering, located in Yildiz Technical University in Istanbul, Turkey. The AERAT1675_120 SPKE GNSS antenna is located on the roof of the Civil Faculty. GNSS data is collected by the Ashtech Proflex PF800 receiver located in the Geodetic Metrology Laboratory of the department. The Proflex web server is used for the NTRIP caster and for monitoring the base station. The corrections are sent for real time applications via internet communication. The YLDZ single base RTK system IP is 193.255.212.232 and a 2101 port. Users can access the web page of the station using the http://www.ggntr.com/ link. On the other hand, as of August 2014, the YLDZ station is a EUREF proposed station with a 20815M001 number.
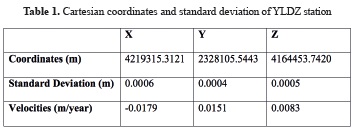
The coordinates of the YLDZ station are determined by processing the GNSS data by GAMIT/GLOBK software in IRTF2008 datum, using 38 reference stations in the IGS network. The velocities of these points are millimetre sensitive for calculating orbit information and earth rotation parameters spread over a 1000 km diameter of the YLDZ point.
In this data process, the IGS final ephemeris data was used to calculate precise coordinates and velocities. The coordinates and standard deviation of YLDZ station were then transformed to ITFR96 datum for national applications (Table 1).
Network RTK
The limitation of the single base RTK technique is the distance between the base receiver and the rover receiver due to distance-dependent biases; namely, orbit bias, ionosphere bias and troposphere bias. Techniques have been developed to overcome this distance dependence using a network of GNSS reference stations spread over a wide geographic area (Hu et al. 2003; Rizos and Han 2003).
The aim of Network RTK (NRTK) is to compute network corrections from the observations of several reference stations and send them to the user (Wegener and Wanninger,2005). NRTK requires an ambiguity resolution 'engine' which will fix the integer ambiguities between the static multiple reference receivers, located at stations of known position, and so make up the network (Rizos and Han 2003). The reference station separation is usually restricted to less than 100 km to allow for quick and reliable ambiguity resolution. As the number of stations increases, better corrections can be attained (Ahmed El-Mowafy 2012).
There are several correction computing solutions, such as the VRS (Virtual Reference Stations), MAC (Master Auxiliary Concept), PRS (Pseudo Reference Stations) and FKP (Flächenkorrektur parameter) methods. The VRS technique is currently the most popular and efficient method of transmitting corrections through a data link to the network users for RTK positioning (Hu et al., 2003). The basic theory of the VRS method is to transform measurements made at real reference stations to the location of the VRS and, therefore, to a different location at the same epoch. The pseudo-range phase is described by equation 3 after considering a substitution of f s=c/λs.
On the left side, is the measured carried phase which is modeled by
is the measured carried phase which is modeled by  , the geometric distance between receiver and satellite, integer ambiguity
, the geometric distance between receiver and satellite, integer ambiguity  and
and  , the combined receiver and satellite clock bias (Hoffmann et al. 2008).
, the combined receiver and satellite clock bias (Hoffmann et al. 2008).

The terms and are changed in accordance with varying locations in this equation. The receiver r is once located at the real reference station A, represented by the coordinate factor XA, and once at the VRS, represented by XV. The results of these two locations from (3) are the two following equations (Hoffmann et al. 2008).


Satellite orbit errors, ionospheric and tropospheric refraction errors are included in  term, which is modelled or solved by all baselines of the reference network. Calculating the differences of these equations gives the following result.
term, which is modelled or solved by all baselines of the reference network. Calculating the differences of these equations gives the following result.

Turkey has had all of the covered network, named CORS-TR or TUSAGA Active, which currently has 150 reference stations (4 of them are located in North Cyprus) providing 24/7 RTK positioning applications, geodetic/cadastral surveys, modelling the atmosphere researches, monitoring plate tectonics, earthquake prediction early warning systems and GIS applications (Gülal et al., 2013) in ITRF96 datum and 2005.0 epoch. The positioning accuracy of real-time measurements is under 3 cm horizontally and 5 cm vertically (Eren et al. 2009). The Master and Auxiliary Control Centres broadcast the coordinate correction using VRS CMR+, VRS RTCM 3.1, SAPOS FKP 2.3, RTCM3Net (MAC) and DGPS techniques (Yildirim et al. 2011).
The CORS-TR network was established at the end of 2008 with the support of the TUBITAK (The Scientific and Technological Research Council of Turkey) project. The Istanbul Kültür University has taken over the responsibility of making the network fully operational under the supervision of the General Command of Mapping and General Directorate of Registration and Cadastre. This network was built with the benefit of some TUTGA (Turkish National Fundamental GPS Network) points which serve as a reference to geographic information, established with the cooperation of the General Command of Mapping and General Directorate of Land Registry and Cadaster (Kurt and Cingoz 2013).
Performance Test of the YLDZ Single Base RTK Station
The performance tests of the YLDZ station were carried on in two stages. In the first stage, the coordinates of YLDZ station were determined in the CORS-TR network by real-time measurements using the VRS method. As a result of this measurement, the precision of coordinates and standard deviations of the YLDZ point was calculated in the CORS-TR network system datum.
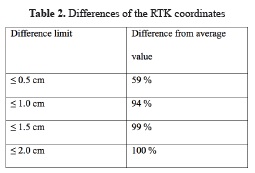
The Ashtech Proflex 800 GNSS receiver and AERAT1675_120 SPKE geodetic antenna were used. In total, 6500 epoch by epoch coordinate data with an interval of 10 seconds was collected in approximately 18 hours. The average value of the measured coordinates and standard deviations was calculated. The differences in these coordinates are given in Fig. 1, while the differences percentage of all the surveyed epochs are given in Table 2.
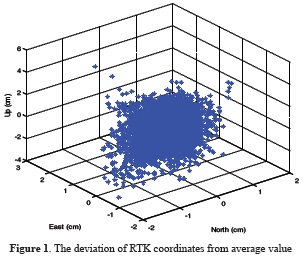
The average value of YLDZ coordinates of 6500 epochs is determined by the CORS-TR network, while the differences between North East Up coordinates are calculated from static and real-time observations.
The post processed coordinates of YLDZ station were entered into the Ashtech web server software to be used in real-time measurements in order to determine the coordinates of benchmark points in the next stage. On the other hand, the YLDZ point was determined by CORS-TR network in real time to calculate the coordinate differences between these two systems for precision of the YLDZ single base RTK solution versus the CORS-TR solution. The differences between the North, East and Up coordinates are close to 2 cm.
In the second stage, test surveys were carried out in 5 pillar-constructed benchmarks with a 5 repeatability up to 50 kilometres from YLDZ single base station, in distances of 10, 15, 25, 40 and 50 kilometres respectively. Real-time surveys were carried out with the Spectra Precision SP80 GNSS receiver, which has an 8 mm + 1 ppm horizontal, 15 mm + 1 ppm vertical accuracy.
At each benchmark point, the coordinates were determined by the YLDZ single base RTK method, the CORS-TR network and the VRS method. An average of 5 epochs of North, East, Up coordinates, initiation time, measuring time, PDOP, observed satellite numbers, Horizontal RMS and Vertical RMS values of coordinates were recorded at all 5 benchmark points with 5 repeatability in order to determine the precise coordinates and standard deviation between the sessions.
Benchmark points are Istanbul GPS Triangulation Network (IGNA) points which are in the ITRF96 datum 2005.0 epoch. The IGNA network was constituted in 2005 by processing GNSS data through the fixing of 11 TUTGA points close to Istanbul city.
RTK measurements were carried out in the ITRF96 and 2005.0 beginning epoch at the benchmark points with 5 repeatability in order that the standard deviation values between sessions be calculated. The coordinate differences between known and measured coordinates are examined in Fig. 2 for two RTK solutions.

In figure 2 (a), the deviation between known and measured coordinates by the CORS-TR network was under 4 cm both horizontally and vertically. The CORS-TR solution is not due to the distance from YLDZ single base station but the CORS-TR network points are far away from the measured points. The distance from reference points to measured benchmarks is about 50 km. In particular, the last of two test results have high coordinate differences from the known values, perhaps due to the distances from the reference points of CORS-TR network.
In Fig.2 (b), the results of the YLDZ single base solution are given. The deviation of the coordinates is under 2-3 cm horizontally and vertically up to 50 km from the YLDZ station.
During the test survey, the repeatability of the RTK solutions was also tested. Five sets of RTK measurements were attempted.
At each of the benchmark points, the GNSS receiver was initiated to the CORS-TR and YLDZ casters one by one. When the GNSS receiver was initiated to CORS-TR, measurements were taken by calculating the mean value of 5 surveyed epochs. This constituted a first set of RTK measurements. The GNSS receiver was then initiated to the YLDZ caster and the first set of the measurements was completed. This operation was continued until 5 sets of RTK measurements were completed.
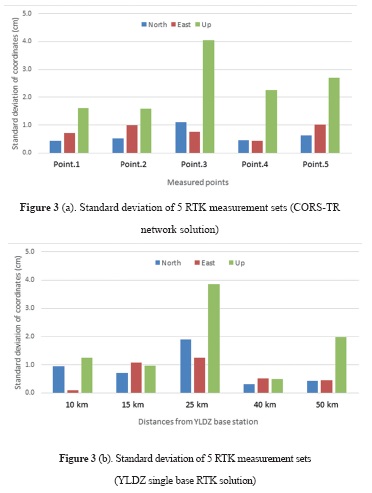
We now had 5 by 5 North, East and Up coordinates of each benchmark points solved by the CORS-TR and YLDZ solutions. The standard deviation between these measurements was calculated to describe the measurement differences in respect to their average value. If the deviation of the sets were at a high value, it showed us that the measurements were far from the average value. If the standard deviation value was then small, the measurements were close to the mean value and so the measurements were coherent in relation to each other.
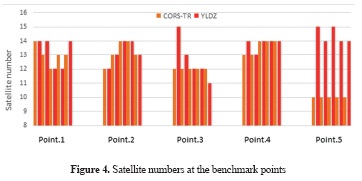
Looking at figure 3, it can be said that the standard deviation of the coordinates is small and close to zero value. Hence, the measurement quality was good. Only in the third benchmark point were the values higher in contrast to others, but still under 4 cm for both CORS-TR and YLDZ solution. The reason might be poor satellite geometry. Figure 4 shows the satellite numbers which were observed by both the CORS-TR and YLDZ solutions during benchmark tests with 5 repeatability.
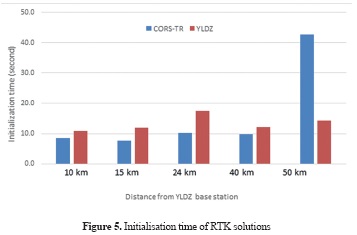
Initialisation time is another important criterion in network RTK solutions (Eren 2009). Fig. 5 shows the average of the initialisation times of 5 RTK sets for all the benchmarks. The YLDZ RTK solution initialisation time was sometimes close to the CORS-TR solution.
Conclusion
Network RTK solutions are useful across the world for real time positioning. In Turkey, the CORS-TR RTK network has operated since 2008 for real time applications in ITRF96 datum. As a result of the measurements carried with the CORS-TR network at the benchmark points, the differences between the known and measured coordinates are under 3-4 cm horizontally and vertically (Fig. 2a). The results of the measurements with 5 repeatability are close to each other at the same benchmark points. The standard deviations of these are near/under 1 cm horizontally and 3-4 cm vertically (Fig. 3a).
The coordinate differences of 4 and 5 points are higher than the others. At the 4th point, the observed satellites are 13-14 numbers. The measurements made at the 4th point are the same because the standard deviation of these measurements is 0.5 cm horizontally and almost 2 cm vertically (Fig.3a). At the 5th point, the observed satellite numbers are 10 (Fig. 4). Besides, the initialisation time of this solution is approximately 40 seconds; therefore higher than the other values. Satellite geometry may be a reason for dropping positioning accuracy. In addition to these, at the 3rd point, the differences of North, East and Up coordinates are under 2 cm but the standard deviation of the Up coordinates is 4 cm (Fig. 3a). The observed satellites are 12.
CORS-TR network positioning accuracy, which was tested at 5 benchmark points, was calculated as 3-4 cm horizontally and vertically (as given in the literature). This value depends on satellite geometry and therefore on the initialisation time and the distances to reference points.
When examining the YLDZ single base RTK solution, the coordinate differences of known and measured are both near and under 1-2 cm horizontally and near 3 cm vertically (Fig. 2b). The standard deviations of 5 repeatability of the measurements are an average of 1 cm horizontally and 3 cm vertically. The higher value is 4 cm with the 3rd test point at the Up coordinate, just as with the CORS-TR network solution. However, at the benchmark points 4 and 5, the coordinate differences calculated by YLDZ solution are under 1 cm and 2 cm respectively (Fig. 2b). The observed satellites in these points 14 and 15 (Fig. 4). The average initialisation time of YLDZ single base solution is under 20 seconds.
The differences of known and measured coordinates change from 0.5 cm to 2 cm horizontally and from 0.5 to 3 cm vertically. The distance between base and rover receiver does not change perceptibly for the coordinate differences up to 50 km. However, at the 5th point, the differences of North coordinates are about 2 cm and higher than the other points (Fig. 2b). Judging from this result, it may be said that the distance between the receivers is important for coordinate precision. In addition to this claim, the initialisation time (Fig. 5) is changed with the distance between the base and the rover receiver.
The coordinate differences determined by the two RTK solutions were under 1.5 cm with 99% of measured epochs (Table 2). Going by these measurements, it can be said that the YLDZ single base RTK solution is a choice for users up to 50 km away from base station. The distance among base and rover receiver may therefore be efficient for coordinate accuracy. In addition to this conclusion, the satellite geometry has been shown to be important for RTK measurements when determining precise coordinates. Being that the initialisation time is dependent on the satellite geometry, this is important for the accuracy of positioning.
Acknowledgments
This research has been supported by the Yildiz Technical University Scientific Research Projects Coordination Department (Project Number: 2012-05-03-KAP01). The authors wish to thank Geomatics Ankara-Turkey for GNSS equipment and technical support.
References
Ahmed El-Mowafy 2012. Global Navigation Satellite Systems - Signal, Theory 162 and Applications, part 7, Precise Real-Time Positioning Using Network RTK, pages 161-164. [ Links ]
Eren, K., Uzel, T., Gülal, E., Yıldırım, Ö, Cingöz, A. 2009. Results from a Comprehensive Global Navigation Satellite System Test in the CORS-TR Network: Case Study, JOURNAL OF SURVEYING ENGINEERING © ASCE / FEBRUARY 2009, pages 10-18. [ Links ]
Feng, Y. and Wang, J. 2008. GPS RTK Performance Characteristics and Analysis, Journal of Global Positioning Systems (2008) Vol. 7, No. 1, pages 1-8. [ Links ]
Gülal, E., Erdoğan, H., Tiryakioğlu, İ. 2013. Research on the stability analysis of GNSS reference stations network by time series analysis, Digital Signal Processing 23 (2013) pages 1945-1957. [ Links ]
Hofmann-Wellenhof, B., Hoffmann, et al,, H., Wasle, E. 2008. GNSS - Global Navigation Satellite Systems, GPS, GLONASS, Galileo, and more, Springer Wien New York, ISBN 978-3-211-73012-6. [ Links ]
Hu, G.R., Khoo, H.S., Goh, P.C., Law, C.L. 2003. Development and assessment of GPS virtual reference stations for RTK positioning, Journal of Geodesy (2003) 77: pages 292-302. [ Links ]
Kurt, A.İ, Cingöz, A. 2013. Birlikte Çalışabilirlik Kapsamında Türkiye Ulusal Sabit GNSS İstasyonları Ağı (TUSAGA-AKTİF), TMMOB COĞRAFİ BİLGİ SİSTEMLERİ KONGRESİ, Ankara. [ Links ]
Landau, H., Chen, X., Kipka, A., Vollarth, U. 2007. Network RTK, Getting Ready for GNSS Modernization, GPS World, April 2007, pages 50-55. [ Links ]
Langley 1998. RTK GPS, GPS World; Sep 1998; 9, 9; ProQuest Science Journals, pages 70-76. [ Links ]
Rizos C. and Han, S..2003. Reference Station Network Based RTK Systems-Concepts and Progress, WUHAN UNIVERSITY JOURNAL OF NATURAL SCIENCES Vol. 8 No. 2B, 2003, pages 566-574. [ Links ]
Rizos, H. 2003. Network RTK Research and Implementation - A Geodetic Perspective. [ Links ]
Spectra Precision SP-80 GNSS Receiver Manual. [ Links ]
Volker WEGENER And Lambert WANNINGER 2005. Communication Options For Network RTK / SAPOS® Realization, Proceedings of the 2nd Workshop on Positioning, Navigation and Communication (WPNC'05) & 1st Ultra-Wideband Expert Talk (UET'05), Pages 115-118. [ Links ]
Yildirim, Ö., Salgin Ö., Bakici, S. 2011. The Turkish CORS Network (TUSAGA-Aktif), FIG Working Week 2011, Bridging the Gap between Cultures, Marrakech, Morocco. [ Links ]
Xu, G. 2007. GPS, Theory, Algorithms and Applications, 2nd Edition, Springer, ISBN:978-3-540-72714-9. [ Links ]
