










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería y Ciencia
Print version ISSN 1794-9165
ing.cienc. vol.6 no.12 Medellín Jan./June 2010
Atractividad local en la bifurcación de zip
Atração local na bifurcação da zip
Local atractivity in zip bifurcation
Carlos Mario Escobar-Callejas1, José Rodrigo González-Granada2 y Abel Enrique Posso-Agudelo3
1 Magíster en Matemáticas, ccescobar@utp.edu.co, profesor, Universidad Tecnológica de Pereira, Pereira-Colombia.
2 Doctor en Matemáticas, jorodryy@utp.edu.co, profesor, Universidad Tecnológica de Pereira, Pereira-Colombia.
3 Doctor en Matemáticas, posssoa@utp.edu.co, profesor, Universidad Tecnológica de Pereira, Pereira-Colombia.
(Recepción: 17-mar-2009. Modificación: 26-ago-2009. Aceptación: 28-ago-2009)
Resumen
En el presente trabajo se estudia la atractividad local del segmento de equilibrios que se forma en el fenómeno de la bifurcación de zip para un sistema tridimensional de ecuaciones diferenciales no lineales. Este trabajo puede ser considerado como una generalización de un resultado de Farkas en bifurcación de zip de modelos en competición.
Palabras claves: bifurcación zip, k-estratega, r-estratega, respuesta funcional, dinámica población, principio de exclusión competitiva.
Resumo
Este trabalho estuda o segmento local de atracção contrapesos que faz sobre o fenômeno da bifurcação da zip de três sistema bidimensional de equações diferenciais não-linear. Este trabalho pode ser considerado como uma generalização de um resultado na bifurcação Farkas zip modelos competención.
Palavras chaves: bifurcação zip, k-estrategista, r-estrategista, a resposta funcional, dinâmica populacional, princípio de exclusão competitiva.
Abstract
In this paper the local segment attractiveness equilibrium that forms on the phenomenon of zip bifurcation for a three-dimensional system of differential equations nonlinear is studied. This work may be regarded as a generalization as a result on Farkas's zip bifurcation in competition models.
Key words: zip bifurcation, k-strategist, r-strategist, functional response, dinamical population, competitive exclusion principle.
1 Introducción
En el estudio del problema concerniente a la validez del principio de la exclusión competitiva, para el caso de dos especies predadoras, compitiendo por una presa que se regenera, el modelo (1) ha sido ampliamente considerado por varios autores [1].
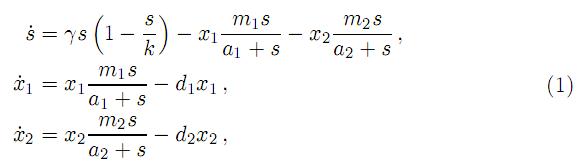
donde x1, x2 y s son los tamaños de la población de los dos predadores y el de la presa que se regenera; y se supone que en ausencia del predador existe un crecimiento logístico de la presa. La respuesta funcional es saturada de acuerdo con la cinética de Michaelis-Menten, donde γ > 0 es la rata de crecimiento intrínseca de la presa, k > 0 es la capacidad de carga del medio con respecto a la presa, mi> 0, di> 0 y ai> 0 son la rata de nacimiento maximal, la rata de muerte y la constante de saturación media, respectivamente, del predador (i = 1, 2).
Considerando [1], las constantes en este modelo son
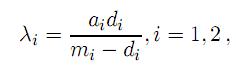
que se introducen teniendo el siguiente significado: xi se incrementa si y sólo si s > λi, según sea xi positivo, llegando a ser cero en s = λi. Los autores de [2] han mostrado que las soluciones del sistema (1), correspondiente a valores iniciales positivos, son acotadas y permanecen en el octante positivo y que la especie predadora i-ésima puede sobrevivir únicamente si 0 < λi < k, lo cual implica que mi > di. También han estudiado el caso genérico con λ1 ≠ λ2, en [2] y [3] se demuestra que, para algunos valores de los parámetros, algunas soluciones periódicas pueden obtenerse en el octante positivo significando que la coexistencia es posible. En [4] se ha probado (usando teoría de bifurcación) que, en el caso 0 < λ1< λ2, existen soluciones periódicas en el octante positivo para valores suficientemente pequeños de | λ1 λ2 | y k (a1 + 2λ1). En [5] se ha tratado el caso λ1 = λ2 = λ. Se ha establecido, en el caso a1 = a2 = a, que si k a + 2λ entonces hay un segmento de línea de equilibrio estable, mientras que, si k > a + 2λ entonces "todas las tres especies sobreviven en un ciclo límite permanentemente". También ha probado que, en el caso a1> a2, si k > a1+ 2λ entonces x2 va a cero, s y x1 permanecen en un ciclo límite, si k = a1 + 2λ entonces x2 va a cero, s y x1 tienden al equilibrio, si k < a1 + 2λ entonces las tres especies sobreviven y la solución tiende a un punto de equilibrio del segmento de la línea de equilibrio.
En [6] se ha mostrado que la mayoría de resultados concernientes al modelo de Hsu y otros pueden ser investigados para toda clase de modelos del tipo dos predadores y una presa, modelo cuya característica común es que la tasa de desarrollo de la presa y la respuesta funcional del depredador son funciones arbitrarias que satisfacen ciertas condiciones naturales.
En [7] se ha estudiado el modelo de Hsu y otros bajo la hipótesis especial de que: cierto valor de un parámetro umbral es igual en las dos especies predadoras; este parámetro puede inteRpretarse como la cantidad de presa necesaria para alcanzar una tasa de crecimiento intrínseca igual a la tasa de muerte natural del predador. Esta hipótesis, en el caso de los modelos naturales, hace posible la identificación de uno de los predadores como un r-estratega y el otro como un k-estratega. Los términos r-estratega y k-estratega tienen un significado semejante al asignado en la teoría de la dinámica de poblaciones, es decir, un r-estratega es un predador cuya rata maximal de nacimiento y muerte es alta, por lo cual necesita una gran cantidad de alimento para incrementar su rata de nacimiento, mientras un k-estratega significa un predador con una rata de nacimiento y muerte relativamente baja, pero con la habilidad de mantener la tasa de nacimiento relativamente alta aún cuando pequeñas cantidades de alimentos le sean posibles lograr.
En [8] se ha introducido el concepto de bifurcación zip para denotar el siguiente fenómeno: "a bajos valores de la capacidad de carga k del ecosistema con respecto a la presa, una línea de equilibrio es un atractor del sistema, ella representa coexistencia estable de las tres especies. Si k es incrementado, los equilibrios son continuamente desestabilizados, empezando por aquellos que representan la dominancia del k-estratega sobre el r-estratega. Arriba de cierto valor de k, el sistema no tiene más equilibrios estables que representen coexistencia, sin embargo, un ciclo límite permanece representando la oscilación de coexistencia del k-estratega y la presa". Recientemente, en [9] se ha generalizado el fenómeno de zip a un sistema ODE cuatro dimensional con respuesta funcional generalizada tipo Holling III. En [10] se ha tratado la ocurrencia de la bifurcación zip en un sistema predador-presa (n+1)-dimensional con respuesta funcional tipo Holling II.
En este artículo se generalizan resultados sobre la atractividad local desestabilizados en el fenómeno de la bifurcación de zip [7] y global del conjunto de equilibrios los cuales son continuamente para el sistema (1). Por último, se ha simulado por computador, mediante los programas Phaser y Mathematica, algunos casos particulares [11] que muestran la actractividad del segmento de equilibrios.
2 Atractividad local en la bifurcación de zip
2.1 Preliminares
En el presente trabajo de investigación se estudia la atractividad local y global del conjunto de equilibrios Lk en la bifurcación de zip, en la clase de sistemas EDOs que modela la competición entre dos especies predadoras por una presa singular, y se generalizan los resultados sobre atractividad local de recubrimiento tubular  [7] para el sistema (2). éste es modelado por el siguiente sistema de ecuaciones diferenciales, en el cual se nota el punto encima de la letra como diferenciación con respecto al tiempo
[7] para el sistema (2). éste es modelado por el siguiente sistema de ecuaciones diferenciales, en el cual se nota el punto encima de la letra como diferenciación con respecto al tiempo
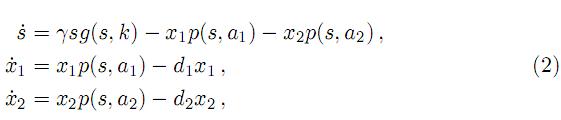
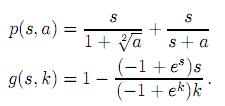
donde s(t) representa la población de especie de la presa y x1(t), x2(t) describen las poblaciones de las especies predadoras que compiten por la presa s(t); p(s, ai) representa la tasa de nacimiento o respuesta funcional del predador i, y g(s, k) significa la resistencia ambiental del medio al crecimiento de la presa. Las constantes γ, di > 0 son, respectivamente, la tasa de crecimiento maximal de la presa y la tasa de muerte de la especie predadora i. Por último, ai > 0, (i = 1, 2) representan los parámetros de escala en la respuesta funcional del predador i. Se asume, además, que el modelo (2) satisface las condiciones [6] y [12] siguientes:
La función g satisface las condiciones:
A la función  se le imponen condiciones de uniformidad en [δ, S0] para cualquier δ, 0 < δ < S0 y la integral, posiblemente impropia,
se le imponen condiciones de uniformidad en [δ, S0] para cualquier δ, 0 < δ < S0 y la integral, posiblemente impropia,  (s, k)dS debe ser uniformemente convergente en [k0, ∞), para cualquier valor k0 > 0. Por último se impone la condición sobre g
(s, k)dS debe ser uniformemente convergente en [k0, ∞), para cualquier valor k0 > 0. Por último se impone la condición sobre g

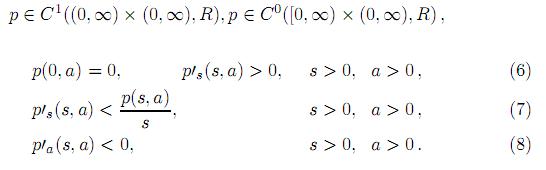
La función que representa la respuesta funcional del predador i, p(s, ai) con ai constante, (i = 1, 2) satisface las condiciones:
Las condiciones (3) a (8) son condiciones apropiadas. éstas coinciden aproximadamente con las hechas por [6]. La condición (3) significa que la rata de crecimiento específica máxima de la presa es alcanzada en s = 0, x1 = 0, x2 = 0 y es γ > 0; la rata de crecimiento decrece si la cantidad de presa se incrementa, y la rata de crecimiento de (s, k) se incrementa con la capacidad de carga k. La relación (4) establece que para altos valores de k, el cambio en la cantidad de presa tiene un efecto despreciable en la rata de crecimiento. La desigualdad (5) significa que (en ausencia del predador) la rata de crecimiento de la presa es positiva si s está abajo de la capacidad de carga k, y es negativa si s está arriba de ésta. Es claro que las condiciones (3) y (4) implican

La condición (6) significa que la rata de nacimiento per capita p de los predadores (también llamada la rata de predación o respuesta funcional) es cero en ausencia de la presa y es una función que se incrementa con la cantidad de presa. La condición (7) es una condición de concavidad débil, algunas veces llamada condición Krasonselskij. Si p es una función estrictamente cóncava de s (para cualquier a > 0), (7) implica que ésta se tiene, salvo puntos aislados donde se tiene un signo de igualdad. La desigualdad (8) establece que la rata de depredación decrece con el parámetro a (entre más alto sea el parámetro a, más alimento es necesario para mantener la misma tasa de nacimiento de la especie predadora). En el modelo original de Hsu y otros, a es la constante media de saturación. En el caso en que p es una función acotada para un valor a dado, se tiene que
es la rata maximal de nacimiento del predador i. Claramente

Para el caso en que los parámetros a1, a2 son distintos, sin pérdida de generalidad se supone:

En correspondencia con esta última condición, a un nivel de presa dado, la rata de nacimiento del predador dos es mas alta que la del predador uno, en otras palabras, el predador uno necesita más alimento para llegar a la misma tasa de nacimiento que el predador dos.
Ahora bien, si d1 es más grande que d2, la condición (11) implica que

es decir, la rata de crecimiento del predador dos es más alta que la del predador uno. Se puede mostrar en este caso que el predador dos saca de competencia al predador uno. Se supone por lo tanto que

Tal como consecuencia de (11), ahora esta condición no implica necesariamente que la tasa de crecimiento neta del predador dos excede la del predador uno. Si en la respuesta funcional del predador i, para un valor del parámetro de escala ai, se satisface la desigualdad mi > di, por la continuidad de p, existirá un nivel de presa s = λi, en la cual se tiene la relación

A λi se le llamará parámetro umbral del predador i; éste puede inteRpretarse como la cantidad de presa necesaria para alcanzar una tasa de nacimiento intrínseca, igual a la tasa de muerte natural del depredador i. En general no se tiene que λ1 = λ2, pero para una clase importante de modelos se puede suponer que λ1 = λ2. Dados d1 y d2, existen λ, a1, a2, tales que p(λ, ai) = di para los modelos que satisfacen la condición

Para el modelo hallado, la condición (14) se reduce a la desigualdad
m2 ≥ d2 ,
ya que bajo el supuesto inicial de d1< d2 y la forma específica de la función p se satisface la condición  p(s, a) = 0 para todo s ≥ 0.
p(s, a) = 0 para todo s ≥ 0.
Los parámetros ai, i = 1, 2, son parámetros de escala del modelo y el parámetro λ actúa como ajustador o seleccionador del tipo de modelo, por esta razón la condición λ1= λ2= λ no es tan restrictiva como parece a primera vista.
En lo que sigue se supone que las dos especies poseen igual parámetro umbral de la presa, es decir, m2 ≥ d2, por lo tanto existe un λ > 0 tal que se tiene (13).
La clase de modelos bajo consideración serán divididos en tres subclases de acuerdo con la siguiente definición.
Definición 2.1. Se dice que el modelo (2), bajo las condiciones (3) a (8) y (11) a (13), es natural, artificial, o degenerado si

respectivamente.
La primera desigualdad de (15) significa, por continuidad, que el cociente de las ratas de nacimiento (la cual es, por (11), más grande que la unidad) decrece en un entorno de s = λ, es decir, la ventaja de la especie dos sobre la uno expresada por (11), decrece a medida que la presa se incrementa; que es lo que usualmente se espera que suceda. La segunda desigualdad de (15) significa que la ventaja de la especie dos sobre la uno expresada por (11) se incrementa a medida que la presa se incrementa.
Especial caracterización puede hacerse en el caso en que el modelo es del tipo natural ya que, teniendo en cuenta las relaciones (11)-(13) se tiene que:
Por lo tanto, para s > λ, aplicando la primera condición de (15), se tiene que:
La última condición muestra que, en este caso, el predador uno tiene mayores tasas de crecimiento relativo que el predador dos. En [7] se ha caracterizado a la especie uno como un r-estratega, ya que su estrategia de supervivencia se basa en el mantenimiento, a lo largo del tiempo, de altas tasas de crecimiento relativo. Mientras en la especie dos, de las condiciones(6)-(8), se deduce fácilmente que hace un uso más eficiente e inteligente de la energía, pues requiere menos cantidad de presa para mantener iguales tasas de nacimiento que la especie uno, por esto Farkas ha llamado a este predador un k-estratega.
2.2 Puntos de equilibrio del sistema
El sistema (2) tiene los puntos de equilibrio: Q1 = (0, 0, 0), Q2(k, 0, 0) y los puntos del segmento de línea recta Lk,

Mediante la linealización del sistema (2), se determina que Q1 es inestable y Q2 es asintóticamente estable para k < λ, e inestable para k > λ; pero la condición 0 < λ = λ1 = λ2 < k es necesaria para la supervivencia de cada predador. Por lo tanto, se asumirá en lo que sigue: si k < λ, por la condición (5), entonces Lk es vacío, y si k = λ, el único punto de equilibrio es el origen Q1. A continuación se verifica la estabilidad de los puntos Q1 y Q2 por linealización del sistema.
Sea J (s, x1, x2) la matriz Jacobiana que representa la linealización del sistema (2) en el origen e I3 la matriz identidad de orden tres, las cuales están dadas tal como sigue
donde F1, F2, F3 son funciones dadas por las expresiones:
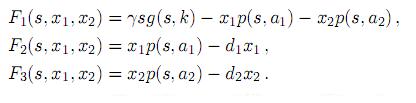
Teniendo en cuenta las condiciones para las funciones p y g en el origen:
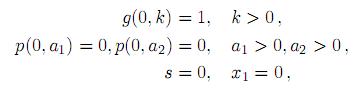
se obtiene
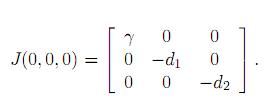
El polinomio característico de J(0, 0, 0) está dado por D(µ) = Det[J µI3]

cuyos valores propios están dados por µ = d1, µ = d2 y µ = γ, por lo tanto, el origen es inestable. En forma semejante se considera la linealización J (s, x1, x2) del sistema (2) en el punto Q2, por lo tanto, se obtienen las condiciones para la función g:
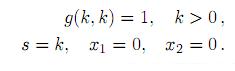
Entonces la matriz J = J (k, 0, 0) adopta la forma

El polinomio característico de J = J (k, 0, 0) es
cuyos valores propios son dados por:
De la expresión anterior y las condiciones (6) y (13), claramente se tiene que el punto Q2 es inestable para k > λ, y asintóticamente estable para k < λ.
2.3 Coexistencia y extinción por bifurcación zip
En esta sección se trata la estabilidad del conjunto Lk. Los elementos del conjunto Lk son denotados con (λ, ξ1, ξ2). Sea J = J (s, x1, x2) la matriz Jacobiana que representa la linealización del sistema (2) en un punto arbitrario (λ, ξ1, ξ2 ) de Lk. Aplicando las condiciones p(λ, a1 ) = d1 , p(λ, a2) = d2 y s = λ para la función p, se tiene

El polinomio característico de J = J (λ, ξ1, ξ2), está dado por

Así que µ = 0 es siempre un valor propio. El polinomio cuadrático entre corchetes es estable, es decir, los dos valores propios tienen parte real negativa, si y únicamente si

ya que el término lineal es siempre positivo por la condición (6). Se escribe la desigualdad anterior así

Multiplicando por λ, y adicionando al lado derecho de la desigualdad el término

se puede re-escribir la desigualdad de la forma

Tomando en cuenta el hecho de que (ξ1, ξ2) satisface (16), se obtiene la desigualdad

En vista de la condición (7), el lado izquierdo es positivo para todo (λ, ξ1, ξ2 ) 2 Lk. Teniendo en cuenta las condiciones (4) y (5), el lado derecho es positivo, decreciente y tiende a cero para k → ∞. Al considerar el segmento de línea recta Bk, tomando el signo de igualdad en la desigualdad dada por (18):

Fijando k, se puede determinar un punto de intersección entre las dos rectas Lk y Bk. Se denota dicho punto de intersección por (x1(k), x2(k)). Resolviendo el sistema de dos ecuaciones lineales determinado por rectas Lk y Bkse tiene, para (x1(k), x2(k)),
Como una preparación al teorema siguiente, se mostrará que el denominador de x1(k) y x2(k) es positivo, negativo o cero si el modelo es natural, artificial o degenerado, respectivamente. Desarrollando la expresión (15) se tiene que

De la expresión anterior claramente se concluye lo deseado. Igualmente se puede mostrar que las funciones x1(k), x2(k) son estrictamente creciente y estrictamente decreciente, respectivamente, si consideramos que el modelo es natural; y estrictamente decreciente y estrictamente creciente, respectivamente, si consideramos que el modelo es artificial. Por la simetría entre x1(k) y x2(k) basta demostrar que x1(k) es estrictamente monótona. Derivando x1(k) con respecto a k, se tiene

El numerador de x´(k) es positivo por (3), (7) y

El denominador será positivo o negativo si el modelo es natural o artificial, respectivamente. Por lo tanto, x1(k) es estrictamente creciente si el modelo es natural y estrictamente decreciente si el modelo es artificial; igualmente se tiene que x2(k) es estrictamente decreciente si el modelo es natural y estrictamente creciente si el modelo es artificial.
Teorema 2.1. Si el sistema (2) es natural y satisface las condiciones (3) a (8) y (10) a (13), existen k1, k2 únicos, tal que si λ < k1< k2< 1, entonces para todo k 2 (λ, k1) todos los puntos del segmento Lk son estables en el sentido de Liapunov y Lk es un atractor del sistema. Para k ∈ (k1, k2 ) el punto (λ, x1(k), x2(k)) divide Lk en dos partes (una de las cuales puede ser vacía). Los puntos de Lk a la izquierda de este punto son inestables, los puntos a la derecha son estables, en el sentido de Liapunov y la parte del lado derecho de este punto es un atractor del sistema. Para k ∈ (k2, 1), el sistema no tiene puntos de equilibrios estables en el octante positivo del espacio cerrado s, x1, x2 .
Prueba: Por hipótesis, este modelo es natural. Evaluando x1(λ) y x2(λ), se observa que:
Claramente las expresiones x1(λ) y x2(λ) son negativa y positiva, respectivamente, bajo las condiciones impuestas a las funciones p y g. Igualmente se tiene que  x1(k) > 0 y x2(k) < 0 teniendo en cuenta que:
x1(k) > 0 y x2(k) < 0 teniendo en cuenta que:
y las condiciones (4) a (8) y (9). Así, por continuidad, por ser la función x1(k) estrictamente creciente y, además, por presentar variación de signo en el intervalo (λ, 1), existe un único k1 > λ, en el cual x1(k1) = 0. Sin embargo, dado que la línea Lk intercepta el eje x2 en un punto de coordenada positiva con k = k1> λ, se tiene que x2(k1) es mayor que cero. Similarmente, existe un k2 > k1 en el cual x2(k2) = 0. En conclusión, para k ∈ (λ, k1), las líneas Lk y Bk se interceptan en el segundo cuadrante y el conjunto Lk se encuentra debajo del segmento de línea Bk, es decir, la condición (18) se tiene en cada punto de Lk. Sin embargo, (18) implica que estos puntos del sistema linealizado tienen dos valores propios con parte real negativa, y en cada punto de Lk se tiene una variedad estable bidimensional por el teorema de Harman sobre la existencia de variedades estables e inestables. Para k ∈ (k2, ∞) el conjunto Lk está arriba del segmento de línea Bk, es decir, la condición (18) con signo opuesto en la desigualdad se tiene para cada punto de Lk. Esto significa que los puntos son inestables. Si k ∈ (k1, k2), Lk se divide en dos partes: en la parte izquierda la condición (18) se tiene con signo invertido en la desigualdad, por lo tanto se tiene que la parte izquierda del segmento de línea Lk queda arriba de la parte izquierda del segmento de línea Bk, esto significa que los puntos son inestables, eso mismo implica que en la parte derecha (18) es válida la desigualdad (18), es decir, en cada punto de Lk se tiene una variedad estable bidimensional. Se resalta en esta parte como g(λ,.) es una función no decreciente y x2(.) es una función monótona decreciente; como una consecuencia de ello, si k es incrementado de k1 a k2, los puntos (λ, x1(k), x2(k)) se mueven constantemente a lo largo de Lk del extremo del lado izquierdo al extremo del lado derecho, mientras el segmento Lksufre un desplazamiento paralelo hacia arriba. En este proceso los puntos detrás del lado izquierdo con (λ, x1(k), x2(k)) llegan a ser desestabilizados; Farkas llama a este fenómeno una bifurcación de zip y se concluye la prueba.
A continuación se presentan, sin prueba, algunos resultados que se utilizan en la prueba de la atractividad del segmento derecho de Lk, si k ∈ (k1, k2). Definición 2.2. La variedad diferenciable M es orientable si puede encontrarse un atlas tal que para dos entornos arbitrarios Vi = V y Vj =  , si Vi ∩ Vj ≠ ∅ ;, entonces para todo punto de la intersección se tiene que
, si Vi ∩ Vj ≠ ∅ ;, entonces para todo punto de la intersección se tiene que
A continuación se define el conjunto invariante del flujo. Un sistema dinámico puede ser considerado a lo largo de una vecindad de un punto de equilibrio bajo un sistema de ecuaciones diferenciales autónomo. Se supone, sin pérdida de generalidad, que el equilibrio está en el origen y que el sistema es de la forma

donde A es una matriz constante de orden n X n, g ∈ C1(Rn), g(0) = 0,  = 0, (0) es la matriz derivada de g en x = 0. El flujo generado por el sistema se denota por φt, es decir, φt(x) = φt(t, x) es solución de (22) que satisface las condiciones iniciales φ(0, x) = x. Se supone que la solución está definida para t ∈ R.
= 0, (0) es la matriz derivada de g en x = 0. El flujo generado por el sistema se denota por φt, es decir, φt(x) = φt(t, x) es solución de (22) que satisface las condiciones iniciales φ(0, x) = x. Se supone que la solución está definida para t ∈ R.
Definición 2.3. La variedad diferenciable M, pasando a través del origen x = 0, es llamada variedad invariante local del sistema (22), o del flujo φt, si existe un ε > 0 tal que para x ∈ M , | φ(t, x) < ε implica φ(t, x) ∈ M.
El sistema variacional del sistema (22), con respecto a la solución φ(t, x), es

Se denota la matriz fundamental del sistema como Φ(t, x); se supone que Φ(0, x) = I. Además,

Se muestra que Φ(t, x) =  (t, x). En particular, si x = 0 entonces φ(t, 0) ≡ 0. También (φ(t, 0)) = (0) = 0 y (23) toma la forma
(t, x). En particular, si x = 0 entonces φ(t, 0) ≡ 0. También (φ(t, 0)) = (0) = 0 y (23) toma la forma

por lo tanto, Φ(t, 0) = (t, 0) = exp(At). Esto significa que el flujo φt es

donde

De (25) se puede asumir, sin pérdida de generalidad, que la matriz de coeficiente A tiene s ≥ 0, valores propios con parte real negativa, 0 ≤ c valores propios con parte real cero y 0 ≤ u, valores propios con parte real positiva contando la multiplicidad en el polinomio característico de A, se tiene por lo tanto que s + c + u = n.
Se denota con Rs, Rc y Ru los subespacios propios s-dimensional, c-dimensional y u-dimensional, correspondientes a los valores propios positivos, cero y negativos, respectivamente. Entonces Rn es la suma directa de estos subespacios propios
los cuales son invariantes con respecto al sistema lineal (24). Las restricciones de las proyecciones de (24) en estos subespacios propios generan tres sistemas lineales independientes. Uno de ellos, Rs, es asintóticamente estable. Todas las soluciones tienden a cero exponencialmente cuando t tiende a infinito; Rc puede tener algunas soluciones acotadas y también puede tener soluciones que tienden a infinito cuando t tiende a infinito, y Ru es completamente inestable, es decir, todas las soluciones no triviales tienden exponencialmente a infinito cuando t tiende a infinito.
En otras palabras, existe una transformación de coordenadas lineal regular que lleva (24) a la forma

siendo à = diag[S, C, U], donde S es una matriz estable de orden s X s, C una matriz cuyos valores propios tienen parte real cero de orden c X c, y U una matriz inestable de orden u X u.
Considérese el vectorc η ∈ Rn como suma directa de vectores ηs ∈ Rs, ηc ∈ Rc y ηu ∈ Ru
El sistema (26) puede ser llevado a la forma

Una pregunta importante que surge es si (22) permite una estructura similar. La respuesta es positiva. Para una prueba véase [13], página 243.
Teorema 2.2. Se supone que la matriz A tiene la forma del sistema (22), que existe un entorno Vx del origen x = 0 de Rn y una transformación de coordenadas regular de orden C1, r : Vx → Vx de esta vecindad, en la vecindad Vx del origen z = 0 de tal manera que r(0) = 0. El flujo (25) es transformado en el flujo ψt(z) := (r ο φt ο r-1)(z) de la forma

donde, para un T > 0 arbitrario, la matriz exp(ST) es de orden s X s con todos sus valores propios en módulo menores que uno, exp(CT), es de orden c X c con sus valores propios en módulo iguales que uno, exp(UT), es de orden u X u con sus valores propios en módulo mayores que uno, la función vectorial  es la suma directa de la función vectorial s, c, y u de dimensión s, c y u respectivamente, es decir, = s ⊕ c ⊕ u, es decir,
es la suma directa de la función vectorial s, c, y u de dimensión s, c y u respectivamente, es decir, = s ⊕ c ⊕ u, es decir,
donde z = zs ⊕ zc ⊕ zu ∈ Rs, zc ∈ Rc, zu ∈ Ru; la misma transformación de coordenada tranforma (22) en:
donde S es una matriz estable, C una matriz con la parte real de sus valores propios iguales a cero, y la matriz U de orden u X u con sus valores propios con parte real positiva:

Se necesitan algunas generalizaciones a los teoremas propuestos por [13] (Capítulo IX, lema 5.1, corolario 5.2).
Lema 2.1. Para s ∈ [0, s0], s0 > 0, sea P(s) una matriz estable p X p y Q(s) una matriz cuyos valores propios tienen parte real no negativa para todo s ∈ [0, s0]; se supone que P, Q ∈ C0[0, s0], y el mapeo T1: Rp x Rq x [0, s0] → Rp x Rq definido por:

para (y, z, s) ∈ Rp x Rq x [0, s0] donde Y, Z,  ,
,  ,
,  ,
, , ∈ C0, Y (0, 0, s) ≡ Z(0, 0, s) ≡ 0 y para las matrices Jacobianas ∂(y,z)Y(0, 0, s) ≡ 0, ∂(y,z)Z(0, 0, s) ≡ 0. Entonces existe una vecindad del origen Wp ⊂ Rp y una función g : Wp x [0, s0] → Wq(un recubrimiento en el origen de Rq) tal que g, g´ ∈ C0, g(0, s) ≡ 0, g´ (0, s) ≡ 0, y la transformación de coordenadas
, ∈ C0, Y (0, 0, s) ≡ Z(0, 0, s) ≡ 0 y para las matrices Jacobianas ∂(y,z)Y(0, 0, s) ≡ 0, ∂(y,z)Z(0, 0, s) ≡ 0. Entonces existe una vecindad del origen Wp ⊂ Rp y una función g : Wp x [0, s0] → Wq(un recubrimiento en el origen de Rq) tal que g, g´ ∈ C0, g(0, s) ≡ 0, g´ (0, s) ≡ 0, y la transformación de coordenadas

transformando (30) a la forma

donde

Se observa que las últimas identidades significan que si (u, v) = (u, 0), entonces su imagen, con el mapeo (32), es tal que (u1, v1) = (u1, 0). Esto significa que en el origen de coordenadas z = g(y, s), por (30), también se tiene que z1= g(y1, s), es decir, el conjunto {(y, z) ∈ Rp x Rq: z = g(y, s)} es una variedad invariante de T1 para cada s ∈ [0, s].
Prueba: La prueba coincide paso a paso con la prueba de [13] (capítulo IX, lemma 5.1).
Lema 2.2. Para s ∈ [0, s0], s0 > 0 sean las matrices P(s) y Q(s) como en el lema anterior, sea la familia de sistemas dinámicos T: [0, ∞] x Rp x Rq [0, s0] → Rp x Rq dependiente de un parámetro s definido por:

para t ∈ [0,∞], y0 ∈ Rp, z0∈ Rq, s ∈ [0, s0] donde
y con
si g es la función construida por el lema anterior para T1, entonces (31) transforma (34) a la forma

donde

Si y ≠ 0, z, |y0| es suficientemente pequeño y z0 = g(y0, s), entonces se tiene que, z(t, y0, z0, s) = g(y(t, y0, z0, s), s) para todo t ∈ [0, ∞],

Éste es consecuencia del lema anterior.
Se considera ahora la atractividad del segmento derecho de Lk, si k ∈ (k1, k2). Sea el segmento de línea Ls el conjunto

y la relación

Se considera el subconjunto propio cerrado de Lsdado por

Sea M una superficie suave interceptando Lk transversalmente en (λ,  1, 2) ∈ Lk. Se denota como Tm y se denomina recubrimiento tubular de al conjunto compacto y acotado con la parte de M dentro de la superficie que define el conjunto
1, 2) ∈ Lk. Se denota como Tm y se denomina recubrimiento tubular de al conjunto compacto y acotado con la parte de M dentro de la superficie que define el conjunto

con ρ > 0 y d la distancia Euclidiana y la parte de la superficie de (40) entre M y el plano s, x1 y la parte del plano s, x1 dentro de la superficie (40). Claramente, si ρ > 0 es suficientemente pequeño, la intersección de M y la superficie (40) es una curva de Jordan simple, Ls ⊂ Tm y el interior del segmento de línea Ls está en el interior de Tm. Teniendo en cuenta la notación introducida se tiene el teorema
Teorema 2.3. Para cualquier k tal que k1 < k < k2, y k1, k2 solución de las ecuaciones x1(k) = 0 y x2(k) = 0, respectivamente, con x1(k) y x2(k) dados por las expresiones (19) y (20), y para cualquier 1 que satisface (38), el segmento de recta dado por (39) es un atractor del sistema (2) en el siguiente sentido: tiene un recubrimiento tubular Tm tal que las trayectorias con condiciones iniciales en Tm tienden a cuando t tiende a infinito.
Prueba: Parametrizando Ls de la forma:
si s = 0, se obtiene el punto extremo en Lk en el plano s, x1; si s = 1, se consigue el punto (λ, ξ1s(k), ξ2s(k)) = (λ, x1(k), x2(k)) con x1(k), x2 (k) dados por (19) y (20). Sea ξ1correspondiente a un valor de 0 < s0< 1, es decir,

Así, Ls, dado por (37), corresponde al intervalo [0, s0]. Para cada s ∈ [0, s0], un sistema de referencia puede ser introducido de la siguiente manera: el origen está en (λ, ξ1s(k), ξ2s(k)), dos vectores de la base pueden ser fijados en el subespacio generado por los vectores propios correspondientes a los dos valores propios con parte real negativa del sistema (2), linealizado en (λ, ξ1s(k), ξ2s(k)) y el tercer vector puede ser fijado en la dirección del vector de la línea Lk dado por (41), el cual es el valor correspondiente al valor propio cero. En el sistema (41), ξ1s, ξ2s dependen continuamente de s, como una consecuencia de ello las raíces del polinomio característico (17) dependen continuamente también de s. Claramente, los dos vectores en el subespacio bidimensional de vectores propios correspondiente a las raíces con parte real negativa pueden ser escogidos como funciones continuas de s en el intervalo [0, s0], dado que la dirección del plano varía continuamente. Se concluye que la familia uniparamétrica de transformación de coordenadas dependiente de s ∈ [0, s0] descrita arriba puede ser representada por
donde y = (y1, y2) denota las coordenadas en el subespacio bidimensional de vectores propios, z es la coordenada en Lk, y R(s) es una matriz tres por tres regular, R ∈ C0[0, s0]. Bajo la transformación de coordenadas, el sistema (2) toma la forma:

donde P es una matriz estable de orden dos por dos, F un vector de dimensión dos y G un escalar, P, F;  ,
,  ,
,  ,
,  ∈ C0 en un recubrimiento del origen (y1, y2, z) = (0, 0, 0) y para todos los s ∈ [0, s0], F (0, 0, s) = G(0, 0, s) = 0, ∂(y,z)F(0, 0, s) = 0, ∂(y,z)G(0, 0, s) = 0. El sistema dinámico generado por (44) es de la forma (35) con Q(s) = 0, y satisface todas las condiciones del lema 2.2. Así la función g : W [0, s0 ] → R del lema 2.1 existe donde W es un recubrimiento de (y1, y2) = (0, 0), g ∈ C0 y para cada s ∈ [0, s0] la superficie
∈ C0 en un recubrimiento del origen (y1, y2, z) = (0, 0, 0) y para todos los s ∈ [0, s0], F (0, 0, s) = G(0, 0, s) = 0, ∂(y,z)F(0, 0, s) = 0, ∂(y,z)G(0, 0, s) = 0. El sistema dinámico generado por (44) es de la forma (35) con Q(s) = 0, y satisface todas las condiciones del lema 2.2. Así la función g : W [0, s0 ] → R del lema 2.1 existe donde W es un recubrimiento de (y1, y2) = (0, 0), g ∈ C0 y para cada s ∈ [0, s0] la superficie

es localmente una variedad invariante de (44). Realizando la transformación inversa de (43) al sustituir la función g por z se tiene

Para s fijo, s ∈ [0, s0], (45) es la ecuación paramétrica de la variedad invariante estable del sistema (2) pasando a través del punto de equilibrio en el espacio(λ, ξ1s, ξ2s) ∈ . El mapeo (y1, y2, s) → (S, x1, x2) del cilindro W [0, s0] s, x1, x2, definido por (45), es continuo y uno a uno (por la unicidad de la solución y la regularidad de la matriz R-1(s)). Por lo tanto, este mapeo es un homeomorfismo y esto prueba que para cada ξ1 que satisface (38), sus variedades invariantes correspondientes a los puntos de sen (39) llenan un recubrimiento tubular de . Por el teorema 2.1 se tiene que, a través de cada punto de , pasa una variedad local bidimensional invariante tal que todas las trayectorias en esta variedad tienden a (λ, ξ1, ξ2) exponencialmente cuando t tiende a infinito. Claramente, (λ, ξ1, ξ2) es asintóticamente estable con respecto a la restricción del sistema (2) a la variedad invariante bidimensional; por la argumentación anterior se tiene que estas variedades llenan un recubrimiento de y por lo tanto se concluye la prueba del corolario.
Un resultado análogo al teorema 2.3 se tiene para el caso de los modelos artificiales.
Un modelo artificial se comporta de forma similar a un modelo natural, excepto que la dirección del zip es diferente. La prueba del siguiente teorema es análoga a la del teorema 2.1, por lo tanto sólo se presenta su enunciado.
Teorema 2.4. Si el sistema (2) es artificial y satisface las condiciones (3) (8) y (10) a (13), existen k2, k1 únicos, tal que si λ < k2 < k1 < ∞, entonces para todo k ∈ (λ, k2) todos los puntos del segmento Lk son estables en el sentido de Liapunov; y Lk es un atractor del sistema. Para k ∈ (k2, k1), el punto (λ, x1(k), x2(k)) divide Lken dos partes, una de la cual puede ser vacía. Los puntos de Lk a la izquierda de este punto son estables, los puntos a la derecha son inestables en el sentido de Liapunov, y la parte del lado izquierdo de este punto es un atractor del sistema. Para k ∈ (k1, 1), el sistema no tiene puntos de equilibrio estables en el octante positivo del espacio cerrado s, x1, x2.
3 Modelos numéricos del tipo exponencial algebraico
3.1 Generalidades
En este sección se exponen los resultados numéricos de un modelo de tipo natural. Para este modelo se presenta los retratos de fase para el caso de competición interespecífica λ1 = λ2 = λ, a1 > a2.
En la selección del modelo se definen los parámetros de manera natural, es decir, eligiendo las propiedades intrínsecas que lo definen desde el punto de vista de la dinámica de poblaciones. Es así como se eligieron las tasas de mortalidad dide los predadores, i = 1, 2, la tasa de nacimiento maximal de la presa γ, y el parámetro umbral λ de los predadores. Respecto al parámetro λ, aunque no resulta evidente que la cantidad de presa λ necesaria para que la especie i alcance tasa de natalidad igual a la tasa de mortalidad di, i = 1, 2; es claro que λ es una característica intrínseca del predador. En el modelo se supone la mismas característica del medio respecto al crecimiento de la presa definidas por la resistencia ambiental g(s, k). Una vez elegidos los parámetros básicos de las especies en el sistema, éstos definen la escala de respuesta funcional de los predadores a1, a2, mediante la siguiente ecuación

La ecuación (46) define en el modelo hallado la expresión
Para la presentación de los cambios cualitativos de los retratos de fase de los diferentes modelos, conforme avanza el parámetro de bifurcación k en el caso a1 > a2 (bifurcación de zip), se evalúa el valor de k para valores menores de k1, entre k1 y k2, y mayores de k2.
3.2 Modelo natural
Los siguientes son los parámetros del modelo natural:
la resistencia ambiental g de la presa y la respuesta funcional p de los predadores adoptan la forma:
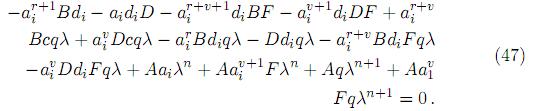
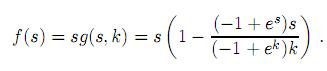
Se define la función f, la cual simplifica la presentación de la fórmula de Bautin para el cálculo de la constante de Poincaré-Liapunov, como sigue
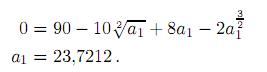
La ecuación (47) para a1 es de la forma
La ecuación (47) para a2 es de la forma
3.3 Caracterización del sistema tridimensional, caso a1> a2
En esta parte se hallan los valores del parámetro de bifurcación donde se presenta la bifurcación zip. Además, se muestran las ecuaciones paramétricas de la línea de equilibrio Lk y la línea de intersección definida por la condición de estabilidad (18). Se representan los retratos de fase del sistema para los distintos valores del parámetro de bifurcación seleccionados a propósito, para mostrar los cambios cualitativos que ocurren. El parámetro k1 está definido por la condición

Resolviendo la ecuación anterior para k se tiene que k1= 14,0964, el cual coincide con el caso a1= a2= a con a = a2. Igualmente el parámetro k2 está definido por la condición
Resolviendo la ecuación anterior para k se tiene que el valor de k2 = 15,1131 que coincide con el obtenido en el caso a1= a2= a con a = a1. La intersección de las líneas de equilibrios Lk y la línea Bk está definida en forma paramétrica por (x1(k), x2(k)).
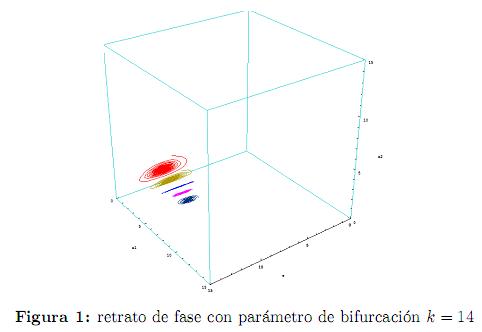
Condición para k = 14. Las ecuaciones paramétricas de los segmentos de línea Lk y Bk están dadas por

El segmento Bk está por encima del segmento de línea Lk en el plano coordenado x1, x2, por lo tanto, por la condición (18), el conjunto de equilibrios es asintóticamente estable para k = 14, como se observa en el retrato de fase correspondiente a un valor del parámetro de bifurcación de k = 14, figura 1.
Las trayectorias del sistema con condiciones iniciales en el octante positivo permanecen en éste y son acotadas y tienden asintóticamente hacia la línea de equilibrios Lk, por lo tanto, el segmento Lk es un atractor del sistema y su cuenca de atractividad es el octante positivo. Los equilibrios en este caso representan coexistencia estable entre el k-estratega, el r-estratega y la presa.
Condición para k = 14,5. Las ecuaciones paramétricas de los segmentos de línea Lk y Bk están dadas por

El segmento Bk y el segmento de línea Lk se interceptan en el cuadrante positivo, por lo tanto el punto de intersección divide el segmento Lk de tal manera que los puntos a su izquierda están por encima de los del segmento Bk, significando inestabilidad de dichos equilibrios; y los puntos a su derecha están por debajo del segmento Bk, representando estabilidad asintótica para k = 14,5. A medida que se incrementa el parámetro k, entre k1 y k2, se va presentando desestabilización del sistema de izquierda a derecha, iniciando por los puntos que representan dominio del k-estratega sobre el r-estratega. Como se aprecia en el retrato de fase para una valor del parámetro k = 14,5, figura 2, existe una zona localizada a la izquierda del punto (x1(k), x2 (k)) tal que los puntos situados en ellas son equilibrios inestables y los puntos situados a la derecha son equilibrios estables existiendo un segmento de recta dado por (39) que es un atractor del sistema (2) en el siguiente sentido: tiene un recubrimiento tubular Tmtal que las trayectorias con condiciones iniciales en Tm tienden a cuando t tiende a infinito. La coexistencia entre las tres especies es aún posible, a pesar de que existen zonas del segmento de la recta de equilibrios del sistema que ahora no son estable desde el punto de vista de Liapunov.
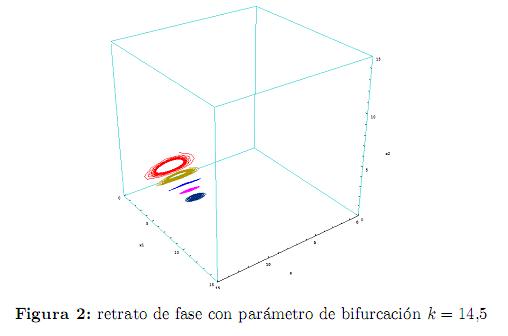
A medida que se aumenta el parámetro k, crece la inestabilidad del segmento Lk, significando la pérdida de terreno del k-estratega con respecto al r-estratega hasta su extinción a valores mayores del parámetro k2.
Condición para k = 15,2. Las ecuaciones paramétricas de los segmentos de línea Lk y Bk están dadas por

El segmento de línea Bk se encuentra por debajo del segmento de línea Lk en el cuadrante positivo, significando inestabilidad del conjunto de equilibrios Lk, como se observa en el retrato de fase correspondiente al valor del parámetro k = 15,2, figura 3.
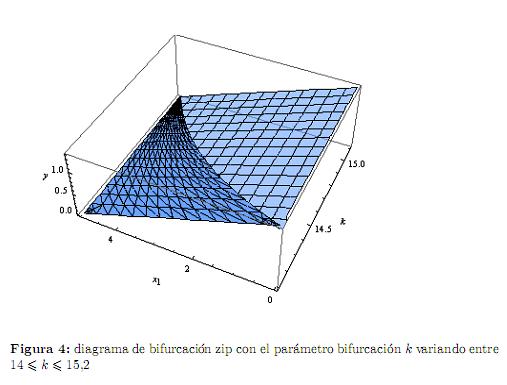
Diagrama de bifurcación. En la figura 4 se presenta el diagrama de la bifurcación zip con respecto al plano de los predadores x1, x2conforme el parámetro k es variado, el área más fina corresponde a los puntos de equilibrios en el octante positivo estables y los del área menos fina a los inestables.

Claramente se observa el fenómeno descubierto por [8]. "A bajos valores de la capacidad de carga k del ecosistema con respecto a la presa, una línea de equilibrio es un atractor del sistema, ella representa coexistencia estable de las tres especies. Si k es incrementado los equilibrios son continuamente desestabilizados, empezando por aquellos que representan la dominancia del k-estratega sobre el r-estratega. Arriba de cierto valor de k, el sistema no tiene más equilibrios estables que representen coexistencia; sin embargo, un ciclo límite permanece representando la oscilación de coexistencia del k-estratega y la presa ".
4 Conclusión
En el presente trabajo de investigación se estudia la atractividad local de una clase de modelos: del tipo dos predadores una presa los cuales exhiben la bifurcación zip, cuya característica común es que la tasa de desarrollo de la presa y la respuesta funcional del depredador son funciones que satisfacen ciertas condiciones naturales que coinciden con las planteadas por [6] y [7]. Se generalizan los resultados sobre atractividad local de recubrimiento tubular [7] para el sistema (2).
Agradecimientos
Al Profesor Miklós Farkas por su amable y acertada orientación en esta investigación.
Referencias
1. GJ. Butler, P. Waltman. Bifurcation from a limit cycle in a two predator- one prey ecosystem modeled on a chemostat. Journal of Mathematical Biology, ISSN 0303-6812, 12(3), 295-310 (1981). Referenciado en 12 [ Links ]
2. SB. Hsu, SP. Hubbel, P. Waltman. Competing predators. SIAM Journal on Applied Mathematics, ISSN 0036-1399, 35(4), 617-625 (1978). Referenciado en 13 [ Links ]
3. A. Koch. Coexistence resulting from an alteration of dendity dependent and density independent growth. Journal of Theoretical Biology, ISSN 0022-5193, 44, 373-386 (1974). Referenciado en 13 [ Links ]
4. HL. Smith. The interaction of steady state and Hopf bifurcations in a two- predator-one-prey competition model. SIAM Journal on Applied Mathematics, ISSN 0036-1399, 42(1), 27-43 (1982). Referenciado en 13 [ Links ]
5. DR. Wilken. Some remarks on a competing predators problem. SIAM Journal on Applied Mathematics, ISSN 0036-1399, 42(4), 895-902 (1982). Referenciado en 13 [ Links ]
6. GJ. Butler. Competitive predator-prey systems and coexistence, in Population biology proceedings (Edmonton 1982). Lecture notes in biomathematics, 52: Berlin: Springer-Verlag, 210-217 (1983). Referenciado en 13, 15, 39 [ Links ]
7. M. Farkas. Zip bifurcation in a competition model. Nonlinear analysis: Theory, Methods & Applications, ISSN 0362-546X, 8(11), 1295-1309 (1984). Referenciado en 13, 14, 19, 39 [ Links ]
8. M. Farkas. A zip bifurcation arising in population dynamics, in 10th Int. Conf. On, nonlinear oscilations, Varna 1984. Sofia: Bugarian Academy of Science, 150- 155 (1985). Referenciado en 14, 39 [ Links ]
9. M. Farkas, E. Sáez, Szántó. Velcro bifurcation in competition models with generalized holling functional response. Miskolc mathematcal notes, ISSN 1787-2413, 6(2), 185-195 (2005). Referenciado en 14 [ Links ]
10. JD. Ferreira, Luis A. Fernandes de Oliveira. Hopf and zip bifuration in an specfic (n + 1)-competitive system, matematics. Matemáticas: Enseñanza Universitaria, ISSN 0120-6788, XV(1), 33-50 (2007). Referenciado en 14 [ Links ]
11. C. Escobar. Modelo original de tipo exponencial algebraico que exhibe la bifurcación zip. Tesis de maestría, Universidad de Antioquia, 2003. Referenciado en 14 [ Links ]
12. M. Farkas. Competitive exclusión by zip bifurcation in "Dynamical Systems, IIASA Workshop 1985 Sopron". Lecture Notes in Economics and Mathematical Systems, ISSN 0075-8442, 287. Springer-Verlag, 165-178 (1987). Referenciado en 15 [ Links ]
13. Philip Hartman. Ordinary differential equations. John Wiley & Sons, New York, 61-63 (1964). Referenciado en 27, 28, 29. [ Links ]

