










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkIngeniería y Ciencia
versão impressa ISSN 1794-9165
ing.cienc. vol.9 no.17 Medellín jan./jun. 2013
ARTÍCULO ORIGINAL
Sistema de navegación tubular para vías digestivas altas
Navegation System for Tubular Upper Digestive Tract
Andrea Del Mar Casallas Mora1, Lerly Yulieth Amaris Serrato2 Cindy Lizeth Carvajal Gaitán3 y Camilo Andrés Rojas Cifuentes4
1 Estudiante de Ingeniería biomédica, andreitadelmar@gmail.com, Universidad Manuela Beltran, Bogotá, Colombia.
2 Estudiante de biomédica, lerly.amaris@gmail.com, Universidad Manuela Beltran, Bogotá, Colombia.
3 Estudiante de Ingeniería biomédica, cinlizcar.13@gmail.com, Universidad Manuela Beltran, Bogotá, Colombia.
4 Magíster en Ingeniería biomédica, camilo.rojas@umb.edu.co, Universidad Manuela Beltran, Bogotá, Colombia.
Recepción: 24-09-2012, Aceptación: 05-02-2013
Disponible en línea: 22-03-2013
MSC: 92C50 / PACS: 87.85.M - 87.85.Tu
Resumen
La endoscopia actual es una experiencia incómoda ya que su instrumental es de gran tamaño y magnitud, generando sensación de molestia al paciente durante el manejo que realiza el especialista de los dispositivos que se operan en el proceso. Se diseña un dispositivo a escala, que permita contrarrestar tal efecto mejorando el mecanismo de endoscopia; siendo éste un sistema más efectivo y ágil, comparado con la cápsula endoscópica y el equipo actual, por lo cual incluirá un sistema de toma de biopsias para analizar enfermedades gastroenterológicas o cánceres, con comunicación Bluetooth para la visualización del espacio digestivo en tiempo real.
Palabras clave: Biopsia, comunicación Bluetooth, cápsula endoscópica, endoscopia, robótica, sistemas de navegación tubular.
Aspectos relevantes
• El material Ecoflex permite una elasticidad y flexibilidad en el sistema de navegación, en el tracto digestivo. • Su diseño genera un movimiento más ágil, al transitar las vías digestivas. • Su características térmicas permiten que no se afecte la mucosa ni las paredes digestivas manteniendo estable la temperatura corporal tras su interacción con el cuerpo humano
Abstract
The present endoscopy is an uncomfortable experience because these instruments are great size and magnitude, generating feelings of discomfort to the patient during the operation. It's designed a device to scale, allowing counteract this effect improving the mechanism of endoscopy, being this a more effective and flexible, compared with capsule endoscopy and endoscopy equipment present because will include a biopsy system for analyzing gastroenterological diseases or gastric cancers, with bluetooth communication for visualization of real-time space tract.
Key words: Biopsy, Bluetooth communication, capsule endoscopy, endoscopy, soft robot, tubular navigation systems.
1 Introducción
La endoscopia es un procedimiento médico que usa un instrumento en forma de tubo llamado endoscopio, el cual se introduce en el cuerpo humano para observar el interior, y llevar a cabo ciertos procedimientos quirúrgicos. [1] Dicho proceso, ha presentado cambios y variaciones con el tiempo, fundamentados en los beneficios y complicaciones, a nivel instrumental y de funcionalidad, con el fin de generar mejorías para su desarrollo.
Tras el inicio de una nueva era en la tecnología, en que dispositivos electrónicos se pueden crear a escala pequeña, nano o micrométrica, surge un nuevo sistema endoscópico como avance del anterior mecanismo de endoscopia existente, llamado cápsula endoscópica el cual permite obtener imágenes de tramos hasta ahora inexplorables. Su sistema utiliza tecnología de comunicación inalámbrica pero no permite que ésta sea controlada por un operador externo o un sistema de control de navegación, haciendo que sus movimientos y orientaciones sean totalmente al azar, siendo impulsada exclusivamente por los movimientos peristálticos que se generan. [2]
Evidenciando la evolución de la endoscopia y el gran impacto que ha tenido ésta en la prevención y diagnóstico de enfermedades gastroenterológicas, desde la invención de sondas con cámaras y/o pinzas, hasta diminutas cápsulas endoscópicas consumibles que proporcionan imágenes o videos del recorrido realizado dentro del tubo gástrico como del intestino; e igualmente los avances a nivel del campo médico, los cuales demuestran que es mayor el índice o nivel de especialistas que utilizan sistemas o mecanismos cada vez más pequeños y más prácticos durante el desarrollo de procesos quirúrgicos, se realiza un nuevo sistema de navegación rápida a escala pequeña, que desarrolle un proceso endoscópico a nivel de las vías digestivas altas visualizando el espacio gástrico en tiempo real mediante la aplicación de sistemas mecánicos, neumáticos y electrónicos que permitan su desplazamiento en el tracto digestivo, y un sistema de toma de muestras para el análisis de biopsias con el fin de identificar enfermedades gastroenterológicas
2 Modelado del sistema de navegación
2.1 Determinación de parámetros y formación del sistema mecánico
Para el diseño del sistema de navegación endoscópica, se identifica la naturaleza como una fuente de caracterización (movimiento, dimensiones, material etc.) que satisfaga cada uno de los requerimientos y delimitadores que se encuentran en el aparato digestivo, como lo hace la biomimética aplicado a cualquier área o ciencia. La biomimética es un estudio que consiste en la aplicación de la naturaleza y su entorno en dispositivos, mecanismos y estructuras tecnológicas. Basados en este estudio, se observan los movimientos que realizan la mayoría de los animales en su hábitat; identificando su flexibilidad, agilidad y desarrollo práctico, de acuerdo a su funcionamiento y locomoción durante su desempeño. Debido al ambiente y espacio en donde se encuentre el animal, éste posee más ventajas o desventajas, en su movimiento mecánico con respecto a otros animales [3]. Gracias a ello, se analizan todos los factores y parámetros que identifiquen su movimiento en el entorno.
Los parámetros principales para el sistema de navegación que permitirán obtener capacidades y movimientos adecuados para el funcionamiento del dispositivo son Flexibilidad y Elongación.
Tras respectivos análisis de locomoción de varios animales, se seleccionó el de la lombriz, debido a que durante su desplazamiento este posee la capacidad de estirar y comprimir su cuerpo, gracias a sus anillos que se asemejan a los de un fuelle. Esta anatomía permite generar cualquier tipo de movimiento en todos los ejes, grados de curvatura y ángulos de libertad, haciendo que la observación sea total; una funcionalidad específica y primordial que posee el dispositivo durante su transición en el tracto digestivo (Ver Figura 6)
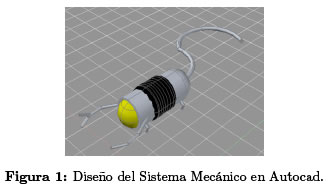
Con diferentes herramientas de software con formato CAD, se diseña el prototipo del sistema mecánico. El cuerpo principal ubicado en la región negra de la Figura 1 representa el fuelle, y las otras secciones, son los diferentes mecanismos que posee el sistema total de navegación (región amarilla: sistema de cámara; región de color gris: sistema de toma de biopsias ubicado en los laterales de la región amarilla).
Para la generación del movimiento del sistema, se realizó el diseño del fuelle exterior en Solidworks, software que permite la creación de prototipos en 2D-3D, el cual, mediante la implementación de fórmulas físicas/matemáticas o la aplicación de diferentes módulos, permite el movimiento del esquema hacia cualquier eje.
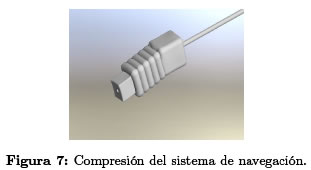
Para el diseño de la Figura 2 se utilizaron herramientas, que permitieran generar la elongación, compresión y curvatura del sistema hacia cualquier dirección, de tal manera que si el sistema necesita dirigirse hacia otro espacio del tracto digestivo, lo realice con gran facilidad; e igualmente, tenga un abarcamiento total del tracto digestivo (ver Figuras 7 y 8).

2.2 Sistema neumático para la generación del movimiento del sistema mecánico
Tal movimiento estará controlado por un sistema externo al paciente que permite la inyección y succión de aire, el cual es manejado por el especialista, de acuerdo a la necesidad que éste requiera. La inyección y succión del aire será emitido desde el control principal de un compresor y válvulas de regulación de caudal hacia el interior del paciente, donde se encuentre ubicado el sistema de navegación.
Dado los delimitantes que se presentan en las vías digestivas altas, como son la abertura de la sección posterior del esófago y el músculo que se encuentra ubicado entre la finalización de la región del esófago y el inicio del estómago llamado cardias [4] (válvula o anillo muscular que permite el paso o la entrada del bolo alimenticio al estómago [5]), se identifica que el sistema de navegación debe tener un mecanismo de inyección de aire, tanto para generar su movimiento respectivo, como para la abertura de tal sección posterior a transitar el sistema, ya que para cualquier tipo de alimento es más fácil al encontrarse la persona de pie o sentado cuando está comiendo, y por acción de la gravedad y los movimientos peristálticos del esófago, va dándose paso a su trayecto hacia el estómago; en cambio, para la realización de una endoscopia, el paciente se encuentra acostado, omitiendo la ayuda que ejerce normalmente la fuerza de gravedad para el paso de sustancias.
De tal manera, que a medida que va transitando el sistema, se va inyectando cierta cantidad de aire que promulgue el estímulo de abertura de la sección a recorrer; e igualmente, se generará tal inyección, al momento de encontrarse el sistema en la región del cardias, ya que éste anillo muscular es sensible a cualquier estímulo generado por la sustancia que llegue aquí [4](normalmente cualquier tipo de comida), indicando que debe abrirse para que pueda entrar al estómago y pueda seguir en el proceso de digestión.
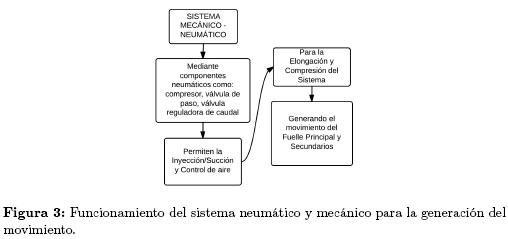
La Figura 3 indica el funcionamiento del sistema mecánico y neumático que prolonga el movimiento del sistema de navegación.
2.3 Sistema para toma de Biopsias
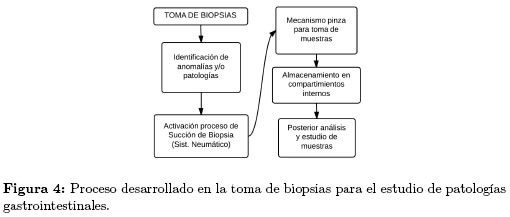
Este sistema se basa en la generación de cinco compartimientos en el interior del sistema para los cuales, mediante una pinza, se podrá obtener una muestra de cualquier región del espacio digestivo. A medida que éste va identificando alguna anomalía, va obteniendo la muestra y guardando en un compartimiento diferente para su posterior análisis y estudio; para identificar enfermedades gastroenterológicas o cánceres gástricos.
La Figura 4 establece el proceso y los pasos que acontecen el sistema para toma de biopsias, basado en el mecanismo de succión y control ejercido por el sistema neumático.
2.4 Sistema de cámara para la visualización del tracto digestivo
El sistema de visualización consiste en una cámara de tamaño adecuado y de alta resolución, la cual contribuirá a obtener imágenes detalladas del espacio gastrointestinal. Debido a que el cuerpo humano presenta humedad en su interior, después de un intervalo de tiempo, el lente de la cámara empieza a empañarse generando poca visibilidad; por tal motivo, se ubicará un sistema de inyección de lubricado con agua (H2O) para el lente de la cámara, que el especialista estará activando cada instante de tiempo en que empiece a identificar que el lente de la cámara se empaña, sin afectar el funcionamiento de la cámara y sistemas cercanos a éste.
Para la visualización del espacio digestivo recorrido por la cámara, se implementa un sistema de luz al costado de la cámara, con base en luces de xenón, la cual permitirá la iluminación adecuada del área durante el recorrido del sistema.
2.5 Sistema de comunicación Bluetooth
El Bluetooth es una tecnología de corto alcance de radio, de bajo potencia y bajo costo, que permite una comunicación inalámbrica estandarizada entre cualquier dispositivo eléctrico. Este concepto de una red de área personal revoluciona y estandariza la forma en que las personas interactúan con la tecnología e información que los rodea, siendo un subsistema de comunicación que no genera problemas en la comunicación entre dispositivos [6].
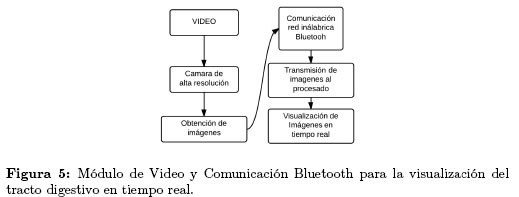
Dada su aplicación se emplea este sistema de comunicación, el cual mediante una tarjeta inalámbrica ubicada en la sección interna del diseño de navegación, permitirá al especialista visualizar y obtener en su procesador, la información necesaria sobre el estado del sistema digestivo superior en tiempo real.
La Figura 5 señala el proceso para la visualización de las vías digestivas altas en tiempo real en el ordenador, a través de la comunicación Bluetooth.
3 Estudio de biocompatibilidad, simulación del movimiento, cálculos de variables y prueba térmica
3.1 Estudio del material
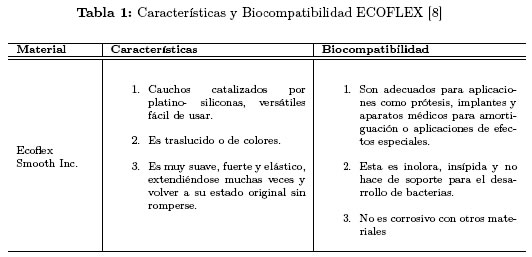
Ecoflex es un tipo de silicona fabricada por la empresa Smooth, la cual actualmente, está siendo aplicada en estudios de robótica blanda por el grupo de Investigación Whitesides Research Group of Harvard University, para el desarrollo o imitación de la dinámica de diferentes sistemas como el movimiento de animales o el sistema locomotor del ser humano [7].
Debido a las características y Biocompatibilidad que posee el material, enunciadas en la Tabla 1 se escoge para la realización del exoesqueleto del sistema (Ecoflex 00-30), haciéndolo adecuado en su funcionamiento y para el ingreso de éste dentro del cuerpo humano
3.2 Simulación del movimiento mecánico
Representación y visualización de las diferentes modalidades durante el movimiento del sistema de navegación diseñado para vías digestivas altas.
Estas modalidades se realizaron en el software Solidworks, mencionado anteriormente en la generación del diseño del prototipo, permitiendo con esta herramienta y sus múltiples comandos, visualizar si el sistema cumple con los requerimientos de elongación y compresión hacia todos los ejes por parte del sistema, de acuerdo al material seleccionado (Ecoflex).


3.3 Cálculo de variables
Tras la generación del movimiento y la obtención de parámetros como la masa del sistema (m), el Módulo de elasticidad o Young (E), y los cambios de longitud (ΔL) dados por la elongación se identifican las fuerzas presentes, el esfuerzo que se genera para la elongación del sistema y la velocidad con la cual éste recorre el tracto gastrointestinal.
Los cálculos y los parámetros de variables empleados de masa, fuerza, esfuerzo y cambios de longitud son con base al prototipo escala. Por el contrario, los valores del tiempo, aceleración y velocidad son con base en el prototipo original que se está desarrollando, el cual permite identificar la rapidez con que éste se mueve durante su trayecto en las vías digestivas altas.
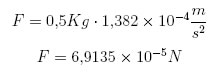
Con m = 5Kg

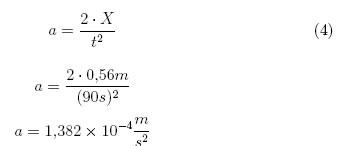
Para la identificación de la aceleración del sistema, debido a que el sistema presenta un movimiento rectilíneo uniformemente acelerado, se obtiene la siguiente ecuación:

donde:
X: Distancia a recorrer del tracto gastrointestinal
Xo: Distancia inicial
Vo: Velocidad inicial
t: Tiempo del recorrido
a: Aceleración del sistema
Como Xo = 0 y Vo = 0 inicialmente, entonces:

Estipulando el tiempo del recorrido del sistema de t = 90 s y un X = 0, 56 m que representa la distancia desde su inicio en la boca hasta el estómago [4], y despejando la variable de aceleración se obtiene:
Reemplazando este valor de la aceleración en la Ecuación (1) de Fuerza obtenemos:
Para la identificación del esfuerzo necesario que permite la elongación del sistema se utiliza la siguiente ecuación

donde:
E: Módulo de Young
Eo: Coeficiente de deformación Unitario
Como el coeficiente de deformación unitario es dado por el cambio de longitud, entonces
Reemplazando este coeficiente de deformación unitario en la Ecuación (5) de esfuerzo se obtiene:
Para la determinación de la velocidad se utiliza la relación de trabajo y energía cinética
Con valores de Fuerza y distancia, se obtiene el trabajo que se aplica al sistema

Despejando la variable de velocidad final y reemplazando en la Ecuación (7) el valor de la energía cinética, se obtiene


El sistema de endoscopia actual se ejecuta en un tiempo de 5 minutos (300 s), aproximadamente [4]. Utilizando un X = 0,56 m (distancia de la boca al estómago) se obtiene la velocidad con la que se realiza el proceso:

Relación de velocidades del sistema de endoscopia actual y el sistema de navegación tubular:
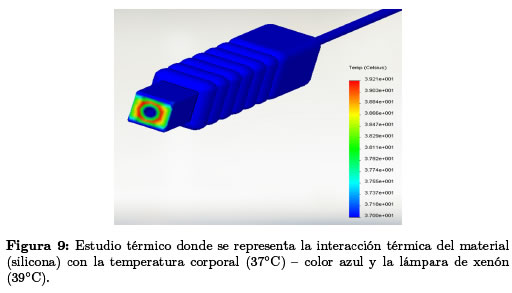
3.4 Pruebas térmicas del sistema
Debido a que el sistema de navegación debe introducirse dentro del cuerpo, éste tiene que mantenerse estable a la temperatura corporal de 37°C para que no haya alteraciones dentro de la mucosa como quemaduras e irritaciones. Tras una prueba de estado térmico en Solidworks, se le aplica al sistema en todas las direcciones una temperatura igual a la del cuerpo con el fin de inducir tal calor térmico al ambiente . Igualmente se representa el flujo de calor que posee la luz de xenón dentro del dispositivo, lo cual especifica los lugares donde pueden o no haber cambios de temperatura. En este caso de la silicona, se puede observar en la Figura 9 que la interacción que hay del material con la mucosa es inalterable ya que a una temperatura de 37°C en el material no presenta cambios, a excepción de la parte frontal del sistema el cual refleja 2°C por encima al valor de temperatura nominal de 37°C, lugar donde la luz de xenón proyecta su foco.
4 Conclusiones
La flexibilidad en el movimiento de éste nuevo sistema permite obtener un nivel de velocidad más eficaz en comparación con el sistema actual de endoscopia. Se identifica que la rapidez del nuevo sistema es 6,64 veces más rápido que el sistema de endoscopia actual, generando que el proceso de endoscopia sea más rápido y ágil al momento de realizarse.
Su exoesqueleto en forma de fuelle junto con el tipo de material del que está conformado genera una locomoción en beneficio a los movimientos peristálticos del tracto digestivo, haciendo más fácil su paso a través de las vías digestivas y obteniendo un desempeño adecuado en su movimiento.
Las propiedades físico-químicas de la silicona (Ecoflex) hacen que el sistema sea biocompatible con las paredes digestivas. No es corrosivo y no permite el desarrollo de bacterias; lo cual es ideal al momento de estar en contacto con los ácidos estomacales (HCL), demostrando niveles de interacción adecuados por parte del sistema que ingresa al cuerpo y el tejido con el que interactúa.
Las características térmicas del material y su módulo de elasticidad permiten que el sistema de navegación tubular tenga un movimiento eficaz y una viscosidad ideal para no afectar la mucosa, además de mantener estable la temperatura corporal (37°C) haciendo que no se provoquen quemaduras o daños internos en las paredes de la mucosa ya que el rango de uso del material es de (-53°C -232°C).
Agradecimientos
Se agradece el apoyo al Dr. Germán Piñeres, especialista en Endoscopia Digestiva, Diagnóstica y Terapéutica Cirugía Laparoscópica, por las referencias e indicaciones dadas para el desarrollo de este proyecto; al Ing. Daniel Díaz por su ayuda para el manejo del programa LATEX y al Ing. Camilo Rojas, por su incontable apoyo en el proyecto.
Referencias
[1] I. American Cancer Society, ''Endoscopia, ¿Qué es endoscopia?'' 2012. [Online]. Available:Available: http://www.cancer.org/Espanol/servicios/Comocomprendersudiagnostico/endoscopia 176 [ Links ]
[2] B. n. González-Suárez, S. Galter, and J. Balanzó, ''Cápsula endoscópica: fundamentos y utilidad clínica,'' Cir Esp., vol. 81, no. 6, pp. 299-306, 2007. [ Links ]177
[3] UC Berkeley, ''Bio-Inspiration: Nature as muse-KQED QUEST.'' [Online]. Available: http://www.youtube.com/watch?v=JnBkbaFsZOY 178 [ Links ]
[4] G. Piñeres, ''Entrevista: Endoscopia digestiva,'' Bogotá, 2012. [ Links ] 179, 180, 186, 188
[5] E. Roncali, ''El sistema digestivo, ¿Cómo funciona?'' in Trastornos Digestivos: cómo evitarlos y cómo tratarlos. Medidas Prácticas para lograr una digestión perfecta. Digital Publications, Inc., 2010. [ Links ] 179
[6] C. Díaz and F. de Haro del Moral, ''Estudios Isotópicos en patologías digestivas,'' in Técnicas de exploración en medicina nuclear: ciclo formativo, imagen para el diagnóstico. Elsevier España, 2004, p. 405. [ Links ] 182
[7] G. Tonietti and A. Bicchi, ''Adaptive simultaneous position and stiffness control for a soft robot arm,'' in Intelligent Robots and Systems, 2002. IEEE/RSJ International Conference on, vol. 2, 2002, pp. 1992-1997. [ Links ] 183
[8] R. Martínez, C. Fish, X. Chen, and G. Whitesides, ''Elastomeric Origami: Programmable Paper-Elastomer Composites as Pneumatic Actuators,'' Advanced Functional Materials, vol. 22, no. 7, pp. 1376-1384, 2012. [ Links ] 183
[9] E. series, ''Super-soft, addition cure silicone rubbers,'' 2012. [Online]. Available: http://www.sculpt.com/technotes/Tech_Sheets/TECH_SHEET_Ecoflex 187. [ Links ]
