











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares em
SciELO
Similares em
SciELO  Similares em Google
Similares em Google 
 Permalink
Permalink1 Introducción
El flujo vehicular es uno de los factores socioeconómicos que afectan de forma directa a las principales ciudades urbanas; su estrategia de control son los sistemas de semaforización, diseñados para la regulación del tráfico vehicular a través de los tiempos de encendido en las luces de los mismos, que permiten o detienen el avance de los vehículos 1.
Un control ineficiente en el tráfico vehicular genera impactos negativos en varios aspectos 2; por una parte, a nivel ambiental, siendo éste la mayor fuente de contaminación acústica en las ciudades, generando ruido, que es un contaminante común, definido según los especialistas como "aquella emisión de energía originada por un conjunto de fenómenos vibratorios aéreos que, percibidos por el sistema auditivo, puede originar molestias o lesiones de oído" 3. Por otro lado, a nivel de seguridad vial, debido a que los accidentes de tráfico constituyen hoy en día una de las principales causas de muerte e invalidez en el mundo 4.
De acuerdo a los últimos estudios de indicadores de tráfico vehicular realizados por el Departamento Nacional de Planeación (DNP) de Colombia, a partir de la información suministrada por el Instituto Nacional de Vías (INVIAS) y por el Instituto Nacional de Concesiones (INCO) 5, el volumen de tránsito por las carreteras nacionales ha sufrido un incremento del 8.6 % en el año 2011 con respecto al año anterior; además, el volumen vehicular mensual tuvo un aumento considerable a través de los meses en la década del 2001 al 2011. Esto indica que se requiere una estrategia de control más eficiente, y debido al aumento del volumen vehicular, una estrategia que se adapte a estos cambios, para mejorar la movilidad vial en las intersecciones semafóricas. Los sistemas de regulación vial en una ciudad están compuestos principalmente por el conjunto de intersecciones semafóricas.
Debido a esta problemática, en la última década varias propuestas han sido presentadas para optimizar el control del flujo vehicular en las princi- pales ciudades de Colombia, éstas se relacionan a continuación.
Pedraza et al. 6 aplican el modelo ANFIS (Adaptive Network Based Fuzzy Inference Systems ) para regular una serie de 8 cruces semafóricos en la Avenida Caracas de Bogotá D.C., controlando sus tiempos de sincro- nización y desfase. En este trabajo se evidenció que la densidad vehicular dentro del corredor vial compuesto por los 8 semáforos en línea se redu- ce en un 42.6 % con respecto al sistema de tiempos fijos; de igual forma la cantidad promedio de vehículos en cola sobre todas las colas tuvo una reducción del 61.7 % utilizando el modelo ANFIS.
En un trabajo posterior, Pedraza et al. 7 llevaron a cabo la configuración de los tiempos de encendido de las luces de los semáforos en la in- tersección de tráfico vehicular, haciendo uso del protocolo de comunicación TCP/IP manteniendo tiempos de comunicación cortos entre la intersección y la central gracias al bajo tamaño de la trama para el envío de información.
Espinosa et al. 8 desarrollaron un controlador de tráfico difuso para regular el flujo vehicular en un grupo de intersecciones, empleando un algoritmo basado en visión artificial para la detección de vehículos. Esta estrategia de control fue evaluada en el software Matlab, el cual es capaz de crear videos aleatorios que simulan el flujo vehicular en un carril. El sistema diseñado disminuye en un 20 % los tiempos de espera para cada vehículo y es capaz de manejar un 40 % más vehículos que con el uso de tiempos fijos.
Por otro lado, la emulación y el modelado del comportamiento de los vehículos a través de una carretera ha servido de apoyo para plantear una solución a la problemática presentada en el flujo vehicular en una secuencia de semáforos, teniendo en cuenta los parámetros de velocidad y el ciclo de los semáforos con la finalidad de reducir el tiempo de viaje debido a la configuración de los mismos 9. Con un propósito similar, Jiménez y Sarmiento 10 llevaron a cabo un modelado del volumen vehicular a través de un corredor vial semaforizado con la herramienta computacional Vissim, en la cual se aplicó una estrategia de control adaptativo creado con lógicas propias obteniendo como resultado una reducción en los largos de fila.
Adicional a los aportes nacionales mencionados, proyectos se han desa- rrollado; en Finlandia, con el propósito de facilitar a los ingenieros de tráfico examinar y evaluar las estructuras de redes de carreteras y el volumen de tráfico de manera gráfica con el uso de una herramienta web y un servidor de base datos 11; en Estados Unidos, la aplicación SmartRoad que deter- mina la presencia de señales de tráfico de parada y semáforos para apoyar a los conductores y a los sistemas de navegación como GreenGPS 12; en España, la optimización en la simulación de redes vehiculares, permite validar nuevos algoritmos y técnicas de manera realista, mediante la integración de la movilidad vehicular sobre mapas de carreteras y el software ns-2 13; entre otros.
En este trabajo se propone un control adaptativo que optimiza el flujo vehicular en una intersección vial de la ciudad de San José de Cúcuta, el cual se integra con un gestor de base de datos que apoya la depuración del rendimiento del controlador, ambos alojados en el sistema embebido Rasp- berry Pi B+. La eficiencia del algoritmo es evaluada mediante la simulación de la intersección, utilizando el software LabView.
El artículo se encuentra desarrollado como sigue: la metodología utili- zada para el estudio de campo, la instrumentación virtual y el algoritmo de control adaptativo; los resultados de la simulación del entorno mediante el criterio estadístico GEH y la confrontación del control adaptativo con el control de tiempos fijos; y finalmente las conclusiones del trabajo.
2 Metodología
El control adaptativo es un método para el diseño de un controlador con parámetros ajustables y un mecanismo embebido que se encargue de dicha tarea. Los controladores adaptativos han sido utilizados principalmente pa- ra mejorar el rendimiento en tiempo real. Para cada ciclo de control, el algo- ritmo adaptativo es normalmente implementado en tres pasos básicos: (1) La información observable es recolectada para calcular el rendimiento del controlador, (2) el rendimiento del controlador es utilizado como una guía para calcular el ajuste de un conjunto de parámetros, y (3) los parámetros del controlador son ajustados para mejorar el rendimiento del controlador en el siguiente ciclo 14. Los pasos mencionados definen la metodología usada para llevar a cabo el diseño y desarrollo del algoritmo de control adaptativo implementado en el presente trabajo.
2.1 Estudio de campo
Se seleccionó el cruce semafórico localizado en la Calle 10 con Avenida 0 en la ciudad de San José Cúcuta, Norte de Santander, Colombia, el cual está conformado por 4 semáforos y presenta un alto flujo vehicular, debido a que es una de las intersecciones más concurridas de la ciudad, y corresponde a una de las vías de ingreso a la zona de mayor tránsito vehicular (Ver Figura 1).
Para el estudio se tomaron los datos de volumen vehicular para cada uno de los cuatro semáforos que conforman la intersección, teniendo en cuenta las horas del día que poseen un nivel de tráfico significativo, esto es, desde las 06:00 hasta las 21:00.
Para las horas del día en donde la variación del nivel de tráfico es considerable, siendo estas las 12:00 y las 18:00, se dividió el estudio en dos secciones para cada una a partir de los 40 minutos, es decir, la medición del flujo vehicular y la respectiva estrategia de control son diferentes para estas horas.

Figura 1: Intersección Semafórica Calle 10 Avenida 0. San José de Cúcuta. Fuente: tomado de Google Maps.
Por otro lado se realizaron las mediciones de los tiempos de encendido fijos de cada una de las luces, verde, roja y amarilla; y el tiempo que demora en abandonar la calle un vehículo cuando el semáforo se encuentra en verde. Dichos valores se encuentran en la Tabla 1.
2.2 Sensor magnetorresistivo para detección de vehículos
Los sensores Magnetorresistivos son usados para la detección de vehículos. En este trabajo fueron emulados usando instrumentación virtual. Este sensor utiliza tres transductores magnetorresistivos perpendiculares entre sí. Cada transductor detecta variaciones magnéticas a lo largo de un eje. Mediante este sistema se consigue la máxima capacidad sensitiva.
Un objeto férreo alterará el campo magnético local que rodea al objeto. La magnitud de este cambio en el campo magnético depende tanto del objeto en sí mismo (tamaño, forma, composición) como del campo magnético del entorno (intensidad y orientación).
Para un resultado óptimo, el sensor magnetorresistivo se simuló en el centro del carril de tráfico. Los ejes del vehículo proporcionan el cambio magnético más efectivo y repetitivo. Este sensor, es un detector "no-direccional", es decir, puede ser montado en cualquier posición sin que ello afecte a sus propiedades sensitivas 15.
2.3 Instrumentación virtual
Con base en los estudios de campo llevados a cabo en la intersección semafórica, y respecto a los niveles de volumen vehicular presentados, se diseñó una planta que emula el estado de dicha intersección, haciendo uso de instrumentación virtual; para ello se elaboró una interfaz gráfica en donde se visualiza la información de la intersección semafórica y su entorno, es decir, el encendido de las luces, el flujo vehicular y la detección de los vehículos; la integración entre el instrumento virtual, el sistema embebido y el dispositivo que ejecuta la estrategia de control es realizada a través de la tarjeta de adquisición de datos Arduino Mega 2560.
La instrumentación virtual fue llevada a cabo con el uso de la herramienta computacional LabView 2013 (64 bits) y ha sido dividida por secciones, según las tareas a cumplir; la metodología utilizada para su desarrollo es la de "Estructuras de Interfaz de Usuario", la cual se basa en uno o varios bucles while que se encuentran continuamente comprobando si se ha se- leccionado alguna opción determinada, normalmente un botón con Latch When Released ; al activarse una opción o suceso se ejecuta su código asociado dentro de una estructura case, dependiendo de la acción que se haya realizado. Debido al requerimiento de tareas simultáneas, como el envío y recepción de pulsos digitales de los sensores y las luces respectivamente, se empleó un método con ejecución concurrente, basado en la característica de paralelismo del software para la instrumentación virtual LabView 2013. Además, para disminuir la cantidad de tiempo de CPU (Central Processing Unit) que consume el programa se ha añadido una espera de 500 ms al bucle principal, ya que éste es el encargado de realizar una lectura directa de la hora del sistema 16.
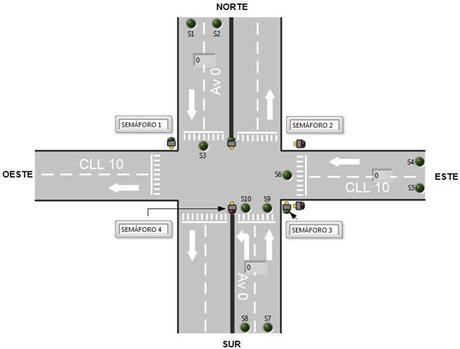
La interfaz gráfica para la visualización de la emulación del entorno se aprecia en la Figura 2, en donde se indica la distribución de los semáforos y los sensores dentro de las calles junto con su respectiva nomenclatura.
2.4 Base de datos
Utilizando como servidor a la Raspberry Pi se diseñó una base de datos, permitiendo la conexión a ella en tiempo real, en donde la información de los sensores procesada por el algoritmo de control como volumen de tráfico vehicular es almacenada para cada una de las vías que conforman la intersección. Esta base de datos es consultada por el mismo algoritmo para llevar a cabo el control que regula los tiempos de encendido de las luces en el sistema de semaforización.
Para el diseño de la base de datos se utilizó el gestor SQLite 3; este gestor es usado para bases de datos relacionales, pero en este trabajo no se hizo necesario el modelo entidad relación, y las tablas usadas son independientes entre sí. A continuación se describen las 3 tablas independientes que conforman la base de datos.
La Tabla tiempos contiene las horas del día y los tiempos de encendido para los 4 semáforos.
La Tabla vehículos ha sido diseñada para almacenar el conteo promedio del flujo vehicular y los largos de fila para cada uno de los semáforos, en las horas del día que funciona la estrategia de control. Los valores de estas dos variables son utilizados para evidenciar la funcionalidad de la estrategia de control en razón de su optimización; también se almacena el volumen vehicular, dato con el que trabaja el algoritmo de control.
La Tabla supervisión fue utilizada para almacenar la temperatura de la CPU y la GPU (Graphics Processing Unit ) de la tarjeta Raspberry Pi.
2.5 Algoritmo de control adaptativo
La estrategia de control es calculada e implementada para una intersec- ción semafórica, considerando el flujo vehicular en todos los sentidos de dicha intersección; este flujo es dependiente del tiempo de la luz verde de cada semáforo, permitiendo que los vehículos fluyan a lo largo de la calle correspondiente. La estrategia puede ser implementada en diferentes inter- secciones semafóricas, y actuará dependiendo de las características de cada una; además pueden operar en conjunto para dar solución a sistemas más complejos, como la secuencia de semáforos a lo largo de una vía.
Haciendo uso del lenguaje de programación Python, fueron diseñadas varias etapas ejecutadas secuencialmente como se enuncian a continuación:
Realizar una constante lectura de los sensores, que han sido emulados mediante instrumentación virtual a través de los pines GPIO (propósito general de entrada y salida) propios del sistema embebido por medio de señales digitales.
Almacenar en la base datos los valores promedio del volumen vehicular, largos de fila y vehículos que abandonan la calle durante el tiempo en verde para cada una de las horas en que funciona el sistema.
El algoritmo realiza una consulta de los valores de volumen vehicular almacenados en la base de datos.
Determinar el tiempo de ciclo y los tiempos de encendido de la luz verde en cada uno de los semáforos para cada una de las 18 horas definidas; estos datos son modificados en la Tabla tiempos mencionada en la sección 2.3.
Enviar la información de los tiempos de encendido hacia un Micro-controlador que funciona como ejecutor de la estrategia de control utilizando la comunicación I2C (Inter-Integrated Circuit ).
El algoritmo cuenta con dos secciones que se aprecian en el diagrama de flujo de la Figura 3; aunque ambas secciones se realizan en secuencia y no en paralelo, en el diagrama de flujo se muestran por separado para describir de manera adecuada su funcionamiento.
Una vez consultada la información del flujo vehicular, correspondiente a cada uno de los semáforos que conforman la intersección en las 18 horas del día que han sido definidas, el algoritmo procede a calcular el tiempo total asignable tmin para la luz verde en los 4 semáforos, es decir, la duración total del ciclo puede ser modificada. El cálculo es hecho a partir del flujo vehicular (ver Ecuación (1)); si el tiempo total necesario para que todos los vehículos abandonen la calle es menor o igual a 64 segundos (70 % del tiempo por defecto), a éste se le suman 12 segundos para subsanar errores y para que el tiempo sea superior al mínimo necesario, y el resultado será determinado como el tiempo asignable para la luz verde; en caso contrario éste será 91 segundos que es el tiempo por defecto de las luces verde para el ciclo. En la Ecuación (1) tmax 13 hace referencia al tiempo máximo necesario entre los semáforos 1 y 3, mientras que V 2 y V 4 son el volumen del semáforo 2 y 4 respectivamente.
 ()1
()1
Posteriormente el algoritmo de control calcula el porcentaje del flujo vehicular para cada uno de los contadores; los contadores del flujo vehicular para los semáforos 1 y 3 se han promediado para obtener un único valor, debido a que ambos semáforos están encendidos durante el mismo rango de tiempo, y se espera que los vehículos acumulados en sus largos de fila respectivos abandonen la calle una vez éste haya transcurrido. Luego son calculados los porcentajes del flujo vehicular para cada uno de los tres tiempos que son: el tiempo de encendido de la luz verde de los semáforos 1 y 3 simultáneamente, el tiempo de encendido de la luz verde del semáforo 2 y el tiempo de encendido de la luz verde de los semáforos 3 y 4 en el mismo rango.
El siguiente paso es asignar a cada uno de los semáforos una porción del tiempo total para la luz verde, ésta es encendida para el semáforo 1 y 3 a la vez como se explicó con anterioridad, es por esto que se utiliza el producto entre el tiempo total disponible y el valor C13 % (ver Ecuación (2)), para el tiempo en verde del semáforo 2 se realiza la misma operación usando el valor C2 %, que es el porcentaje de flujo vehicular para el semáforo 2, el tiempo asignado para la luz verde del semáforo 4 es el restante del tiempo asignable, tiempo en el que también se encuentra encendida la luz verde para el semáforo 3, y durante el cual se espera evacuar los vehículos de la fila del semáforo 4 y los que han llegado para el semáforo 3 mientras éste último estuvo en verde junto con el semáforo 1.
 ()2
()2
Para hacer la predicción que determina si el tiempo asignado a cada semáforo es suficiente para que el largo de fila disminuya a cero, el algoritmo calcula primero el largo de fila aproximado para cada semáforo, basado en el contador promedio de la hora y el tiempo total de cada ciclo que por defecto es 100 segundos, obteniendo el número de vehículos que ingresan a la calle cada segundo, este valor es multiplicado por el tiempo en que los vehículos no pueden abandonar la calle, que es la diferencia entre el tiempo total del ciclo y el tiempo en verde para ese semáforo. Los largos de fila de los semáforos del 2 al 4 son calculados siguiendo el mismo proceso que para el semáforo 1 en la Ecuación (3), cada uno con su respectivo tiempo y contador.
 ()3
()3
Una vez obtenido el largo de fila estimado para cada semáforo se utiliza este valor y el tiempo en verde asignado para conocer si es suficiente para que todos los vehículos abandonen la calle. Para esto se utiliza el estudio de campo realizado con anterioridad, en el que se determinó un tiempo promedio de partida para cada vehículo. Para los vehículos del semáforo 1 se definió que en promedio cada vehículo demora 900 milisegundos en abandonar la calle después de que el vehículo delante de él lo haya hecho, esto debido a que esta calle tiene dos carriles disponibles para el flujo vehicular, en realidad cada vehículo tarda 1.8 segundos en salir, pero como 2 de estos pueden hacerlo a la vez se considera la mitad de este tiempo; el tiempo que tardaría el largo de fila en llegar a cero to1 es el producto entre el largo de fila y el tiempo en promedio de cada vehículo en partir (ver Ecuación (4)), para el semáforo 2 se ha empleado el mismo principio.
 ()4
()4
Se establecieron 1.2 segundos en promedio para que un vehículo abandone la fila perteneciente al semáforo 3, es decir, que para conocer el tiempo necesario para que el largo de fila sea cero en este semáforo (to3) el algoritmo sigue la Ecuación (5). El tiempo de partida para cada vehículo en el semáforo 4 se determinó como 1.6 segundos (ver Ecuación (6)).
 ()5
()5
 ()6
()6
Una vez obtenidos estos datos se procede a calcular la diferencia df t entre el tiempo asignado a la luz verde de cada semáforo y el tiempo necesario para que el largo de fila sea cero en cada uno de los semáforos, tal como se muestra en la Ecuación (7) para la unión de los semáforos 1 y 3, si este valor es mayor o igual, es decir, que es suficiente o más que suficiente, se mantienen los tiempos, de lo contrario al semáforo que más tiempo sobrante tenga, éste es restado y se le adiciona al semáforo o semáforos que lo necesiten. Para los semáforos 2 y 4 las variables son llamada df t2 y df t4 respectivamente.
 ()7
()7
3 Resultados
3.1 Emulación del entorno
Se ha utilizado el criterio estadístico GEH, nombrado así por su inventor, Geoffrey E. Havers; su función es realizar una comparación entre el volu- men simulado y el volumen real que se ha medido mediante estudios de campo. Este criterio es ampliamente utilizado con el propósito de analizar los modelados vehiculares(10), (17). La Ecuación (8) describe el criterio estadístico GEH, donde V olobs y V olsim son el volumen de la observación experimental y el volumen simulado respectivamente.
 ()8
()8
Puesto que los datos del conteo vehicular son variables discretas aleatorias con distribución de Poisson, se ha tenido en cuenta el teorema de Berry-Essén 18 para determinar el tamaño mínimo muestral para cada una de las horas; con base en esto se ha tomado un muestreo de 5 datos del volumen vehicular por ciclo emulado por parte de la instrumentación virtual para cada una de las tres calles que conforman la intersección semafórica, en las horas en las cuales se encuentra funcional el programa. Estos datos han sido sometidos a la Ecuación del criterio estadístico GEH y sus resultados se representan en la Figura 4.
Para un modelado de tráfico vehicular que sea capaz de representar de manera acertada el volumen vehicular real, el 85 % de los casos evaluados mediante el criterio estadístico GEH debe cumplir que su valor sea inferior a 5. En la Figura 4 puede observarse que en todos los casos el GEH no se excede de 5, por lo tanto el modelo emulado cumple con el criterio de evaluación y calibración.
La gráfica comparativa del volumen vehicular emulado contra el real, se aprecia en la Figura 5; en ella se observa la correspondencia que existe entre los datos simulados y los datos observados en el estudio de campo para los semáforos analizados.
3.1 Optimización en el flujo vehicular
Las ecuaciones presentadas y los datos utilizados por el algoritmo adaptativo para predecir la eficiencia de su estrategia de control están basados en aproximaciones y promedios; debido a que los datos del flujo vehicular son discretos y aleatorios, y a que la tendencia del siguiente día no se puede pre- decir con total seguridad; los datos obtenidos por el algoritmo adaptativo presentan un grado de error en relación con los datos presentados.
Este error es presentado a partir del análisis de la raíz media cuadrada (RMSE por sus siglas en inglés de Root Mean Square Error ), siendo ésta de 0.098708 en promedio para los 4 semáforos, con un error máximo de 6.88 y un error mínimo de 0.01. Este análisis es realizado a partir de la Ecuación (9),en donde Xˆ es un vector de N predicciones y X es el vector con los N valores verdaderos.
 ()9
()9
El objetivo final para el que se ha diseñado el algoritmo de control es optimizar el flujo vehicular, es decir, disminuir los largos de fila, y reducir el tiempo promedio que tarda un vehículo esperando en una calle, todo esto en relación con el flujo vehicular total de la intersección vial. Es por eso que se decidió no solo dar prioridad de tiempo a las calles que más volumen vehicular presentan, sino reducir el tiempo total del ciclo cuando el flujo vehicular total de la intersección semafórica sea tan bajo que se considera necesario; esto para dar más tránsito vehicular y evitar que se desperdicie tiempo de la luz verde sin que transite un valor considerable de vehículos.
Para evidenciar y evaluar la eficiencia en el funcionamiento del control adaptativo aplicado, en primera instancia fueron recolectados los datos del primer día de funcionamiento, es decir, con los tiempos fijos medidos en el estudio de campo; para el segundo día, en el que se aplicó la estrategia de control, se siguió el mismo proceso. Los datos son presentados en las Figuras 6 y 7, estos fueron normalizados a partir del volumen vehicular, es decir, los valores de largo de fila y flujo vehicular equivalen al porcentaje que éstos representan respecto al volumen vehicular; el análisis presentado para los datos fueron realizados a partir de la mediana de los mismos.
En el semáforo 1 se obtuvo una reducción del 6 % en el largo de fila como se aprecia en la Figura 6.a, además de esto, el flujo vehicular se mantuvo, teniendo éste una mediana igual al 100 % del volumen vehicular tal como se muestra en la Figura 7.a, es decir, que en aproximadamente todos los ciclos, los vehículos que arribaban podían abandonar la calle al final de éste; el tiempo en verde permitía que los vehículos estancados de la hora anterior abandonaran la calle junto con los pertenecientes a ese ciclo, es por esto que se encuentran datos de flujo vehicular superiores al 100 %. Para las horas en que el tiempo del ciclo fue menor a los 100 segundos asignados por defecto a los tiempos fijos, el tiempo máximo en que un vehículo espera en la calle para poder pasar se disminuyó en aproximadamente 13 segundos, de esta forma aumenta la fluidez vehicular.
Para el semáforo 2, cuyo volumen vehicular es mayor, y para el cual, el tiempo fijo asignado era insuficiente, la disminución del largo de fila fue mayor, siendo ésta de 18 % aproximadamente (ver Figura 6.b); el flujo vehicular aumentó en un 5.5 % con respecto a los tiempos fijos como se aprecia en la Figura 7.b. Para las horas en que el tiempo del ciclo fue menor a 100 segundos, el tiempo máximo en que un vehículo espera en la calle para poder pasar, se disminuyó en aproximadamente 22 segundos.
En el caso del semáforo 3, el largo de fila se redujo en un 1 % con el uso de la estrategia aplicada por el algoritmo de control adaptativo (ver Figura 6.c), esta baja reducción se debe a que éste es el semáforo que más tiempo posee, debido que está encendido a la vez con los semáforos 1 y 3, por lo tanto la diferencia con los tiempos fijos no es tan grande; adicionalmente se presentó un aumento en el flujo vehicular del 4 % aproximadamente, como se muestra en la Figura 7.c; en este semáforo la disminución del tiempo máximo en que un vehículo espera en la fila fue de 6.6 segundos.
Finalmente en el semáforo 4, cuyo volumen vehicular es el más bajo de la intersección, la disminución en el largo de fila fue de un 1 % (ver Figura 6.d), y el flujo vehicular se mantuvo igual, siendo éste el 100 % del volumen vehicular tal como se aprecia en la Figura 7.d, el cambio para éste semáforo no es considerable debido a que al ser su volumen vehicular tan bajo, el tiempo asignado era incluso más que suficiente; para este semáforo en todas las horas se disminuyó el tiempo de la luz verde al aplicar la estrategia de control adaptativo. La disminución del tiempo máximo en que un vehículo espera en fila fue de 16 segundos aproximadamente para las horas en que se disminuyó el tiempo del ciclo.
Para evidenciar la eficiencia del algoritmo de control adaptativo con relación al largo de fila, en la Figura 8 es presentada la comparación de esta variable entre la estrategia aplicada por el control adaptativo y los tiempos fijos; para esto fueron normalizados los datos con respecto al volumen vehicular que se presentó para cada una de las estrategias, y así presentar datos comparables entre sí. Los valores son presentados alrededor de una equivalencia del 100 % a lo largo de las horas en las que funciona la estrategia de control. Lo que se pretende evidenciar es que con el uso del control adaptativo se consiguió disminuir la longitud del largo de fila con relación a los tiempos fijos para todos los semáforos y para la mayoría de las horas; en casos aislados como a las 10:00 para el semáforo 1 y las 17:00 para el semáforo 3 se presentaron largos de fila superiores, esto debido al comportamiento aleatorio de la emulación de volumen vehicular que genera la acumulación de vehículos en la hora anterior; en el caso del semáforo 4 a las 21 horas que se presenta una relación del 200 %, es debido al bajo flujo vehicular, aunque el dato aparenta ser muy alto, para el tiempo fijo se presentó un volumen vehicular de 2 vehículos y para el tiempo del algoritmo fue de 1 vehículo.
Para el flujo vehicular se presentan los datos siguiendo el mismo proceso que se realizó para el largo de fila, éstos son presentados en la Figura 9. Para este caso se evidencia un flujo vehicular mayor al aplicar la estrategia de control adaptativo para la mayoría de las horas del día; tal como ocurrió con el largo de fila se presentan casos aislados en el que esta variable fue menor al usar el control adaptativo, especialmente para el semáforo 4, y es debido a que en ocasiones los vehículos arribaban a la calle en el tiempo cuando la luz verde estaba por apagarse, o debido a la acumulación por los ciclos u horas anteriores.
3.3 Carga de procesamiento en el sistema embebido
Un factor importante para evaluar la eficiencia del algoritmo es conocer qué tan rápido calcula y transmite los datos, para posteriormente ejecutar la estrategia de control. Este tiempo ha sido medido y optimizado a lo largo de las pruebas de funcionamiento y corrección del algoritmo, y se ha conseguido un tiempo máximo de 13.7 segundos, que integra el tiempo que demora en calcular la estrategia de control (duración de encendido de las luces en verde), y en transmitir los datos al microcontrolador mediante el protocolo de comunicación I2C. La primera tarea es realizada en 8.2 segundos y la información es transmitida en 5.5 segundos.
Estas dos tareas son procesadas en forma conjunta; el algoritmo funciona por separado para calcular los datos de cada hora del día, es decir, que los 3 tiempos en verde de cada hora son determinados por el algoritmo, tardando 0.45 segundos en el proceso, e inmediatamente se envían con un retraso de 0.1 segundos para cada dato, sumando 0.75 segundos en procesar y enviar al microcontrolador los datos de cada hora.
A partir de las características de la Raspberry Pi se determinó que posee un procesador multitarea, es decir que puede realizar varios procesos a la vez, por lo tanto, si solo ejecuta uno, y éste lo requiere, el sistema embebido entrega la totalidad del procesamiento, que para la tarjeta Raspberry Pi B+ es de 700 MHz, los cuales son entregados en su mayoría a Python mientras se ejecuta el algoritmo de control. En la prueba realizada se registró un 94.7 % del procesador entregado para esta tarea.
Otro factor importante que se decidió determinar para evaluar el funcionamiento del sistema embebido, ante factores internos y externos, fue la temperatura de su CPU y GPU; cómo se explicó anteriormente esta variable es determinada por el propio algoritmo a través de una función propia del sistema, y su medición fue realizada para 17 horas del día, 16 horas en las que funciona el sistema, y la hora cero, en la que éste se encuentra en reposo y ocurre el envío de datos hacia el microcontrolador a través del protocolo de comunicación I2C.
Los datos obtenidos para la temperatura del sistema embebido usado son presentados en la Figura 10, en donde se evidencia la respuesta del sistema embebido no sólo a la temperatura del ambiente, sino también al procesamiento que éste lleve a cabo de acuerdo a las tareas que ejecute.
Se presentaron temperaturas que se consideran bajas, aunque sean superiores a la del ambiente, como el caso de las 0 horas en que se registraron temperaturas de 37.9 °C para ambas unidades; de la misma manera fueron registradas temperaturas altas, como fue el caso de la 16:00, en donde éstas fueron de 52.6 y 53.8 °C para la CPU y GPU respectivamente, esto debido a que es el momento en que mayor flujo vehicular se presenta y por consiguiente mayor trabajo por parte del sistema embebido procesando las señales, ejecutando el algoritmo y realizando requerimientos a la base de datos. A pesar de estos cambios tan altos de temperaturas, en donde se presenta un rango de 16 °C, el sistema embebido trabajó correctamente en todo el proceso de pruebas realizado durante varios días seguidos y presentando una mediana de 48.2 °C aproximadamente.
4 Conclusiones
El modelo de tráfico vehicular simulado mediante la instrumentación virtual se soportó en un estudio de campo que utilizó el teorema de Berry-Essén para determinar el tamaño de la muestra, con el cual se obtuvo un muestreo mínimo de 5 ciclos para cada una de las horas, representando los niveles de volumen vehicular a lo largo del día. La simulación fue validada empleando el criterio estadístico GEH, y corroboró que el modelo cumplió con el criterio de evaluación y calibración.
En la simulación de la intersección vial, la presencia de vehículos generó señales simultáneas, emuladas con una herramienta computacional que garantizó la concurrencia, ya que todas las señales presentaban igual prioridad de atención.
La manipulación de los tiempos de encendido en las luces de los semáforos por parte del algoritmo de control adaptativo, mejoró la eficiencia del flujo vehicular en la intersección vial, evidenciado en el aumento del flujo vehicular hasta un 5.5 % y, en la diminución del tiempo máximo de espera del vehículo para avanzar hasta 28 segundos y el largo de fila hasta un 18 %.
El control diseñado además de modificarse cuando cambió el volumen vehicular, predijo el largo de fila para el transcurso del día basado en la tendencia acumulada, lo que determinó el reajuste de los parámetros del controlador, cuando fue necesario.
La implementación del algoritmo de control adaptativo y el sistema administrador de base de datos en el mismo sistema embebido, garantizó la confiabilidad en el intercambio de información para la depuración del controlador, porque evitó la conexión con dispositivos externos.
Con base en el caso de estudio, se puede inferir que es posible integrar el control adaptativo y los sistemas embebidos como herramientas de software y hardware para mejorar el funcionamiento en los sistemas de regulación vial; y podría ser referencia para sistemas más complejos, como el conjunto de intersecciones semafóricas secuenciales a lo largo de una vía.

