











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
Permalink1 Introducción
La histéresis es un fenómeno que se presenta en cierto tipo de sistemas cuya salida depende tanto del estado actual de su entrada como el de sus estados pasados. Esto permite realizar un registro de la salida cuando la entrada aumenta o disminuye alternadamente generando una órbita periódica de la salida conocida como Ciclo de Histéresis1.
Debido a su naturaleza no lineal y no suave, la histéresis ha sido estudiada en diversas áreas, como las matemáticas, la física, la biología, la ingeniería y la economía; particularmente, en modelos electromagnéticos, electromecánicos, genéticos, de tasa de desempleo, de control, entre otros 2. En sistemas de control, este fenómeno es utilizado para filtrar señales, así la salida reacciona más lentamente ante su estado actual, permitiendo contrarrestar, compensar o eliminar efectos como: inestabilidades, inexactitudes, perturbaciones, oscilaciones subarmónicas u otro tipo de ondas complejas que afectan de forma no deseada la salida del sistema 3),(4.
Diversos sistemas son diseñados para poseer histéresis, la principal razón radica en evitar la rápida conmutación no deseada en la tensión de salida de la fuente de este tipo de sistemas, con el fin de mantener fija la frecuencia de conmutación respecto a un valor de referencia, lo cual permite que no se deterioren los elementos que lo conforman. Usualmente está técnica es utilizada en la fuente de alimentación de ciertos sistemas, como por ejemplo los termostatos que regulan la temperatura de los sistemas de calefacción.((5),(6),(7))
Un dispositivo donde es comúnmente usada esta técnica de control es el conmutador de potencia relé, que además de tener bajo costo, su operación es simple y robusta, permitiendo controlar dispositivos con altos voltajes o elevadas potencias a bajas frecuencias de conmutación. En la Figura 1 se muestra un tipo de relé que presenta un ciclo de histéresis. Donde, D indica los niveles de conducción y δh indica los niveles de conmutación por histéresis 1.
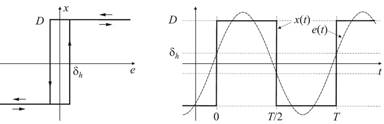
Este conmutador resulta muy eficiente en diversos sistemas, por ejemplo, a la hora de ajustar un termostato en un sistema de calefacción para mantener el nivel de temperatura alrededor de un nivel deseado θ (ver Figura 2). El termostato debe activarse para que la fuente de calefacción se encienda cuando el flujo sobrepase un nivel inferior de temperatura preestablecido s y se active nuevamente para apagar la calefacción cuando el flujo de la temperatura sobrepase el nivel superior de temperatura permitido s8.
Teniendo en cuenta lo anterior, la dinámica de este sistema queda determinada por ciclos de histéresis generados en el flujo de la temperatura cuando este aumenta o disminuye y por el estado de la fuente de calefacción ya sea de encendido o apagado, con esto se puede inferir que esta técnica de control resulta eficiente a la hora de contrarrestar la rápida conmutación (rizado) que presentan los umbrales alrededor del nivel de temperatura deseado θ. 9.
En este trabajo se presenta un análisis, una caracterización y una clasificación del comportamiento de un sistema dinámico suave a trozos 2- dimensional que conmuta bajo una banda de histéresis o Sistemas Lineales Conmutados por Histéresis - SLCH .
En general la histéresis se puede presentar o aplicar en sistemas de R n generando enroscados que pueden ser periódicos o hipercaóticos, lo cuales se originan por la conmutación de sistemas lineales 10),(11) . Sin embargo, en este trabajo se propone y se estudia un sistema lineal en dos variables (R2) que conmuta dentro de una banda de histéresis para encontrar las configuraciones tanto de parámetros como de condiciones iniciales que permitan que el flujo del sistema genere una solución periódica dentro la banda histéresis.
2 Descripción del sistema
El estudio de estos sistemas se desarrolla de acuerdo a las definiciones y teoremas que posee la teoría de los sistemas dinámicos suaves a trozos ( Piecewise-Smooth Dynamical Systems - PWS) 12),(13.
Considere el flujo del sistema en la Figura 3.
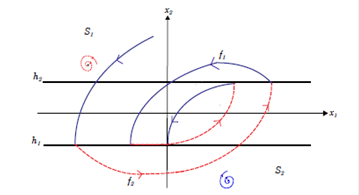
Donde los flujos f 1 y f 2 son sistemas lineales en R214. Para que este sistema presente un ciclo de histéresis es necesario que el flujo de los sistemas lineales que lo conforman conmuten bajo la banda de histéresis [h 1 , h 2]. Suponga que el flujo del primer sistema evoluciona desde la frontera inferior de la banda h 1 hasta la frontera superior de la banda h 2, una vez alcanza este umbral, nuevamente el flujo del sistema evoluciona, pero en este caso lo hace a través del flujo del segundo sistema hasta alcanzar la frontera inferior de la banda h 1, este comportamiento se puede describir por el conjunto de ecuaciones diferenciales autónomas
 ()1
()1
Donde, los vectores  y
y  representan los estados, el campo vectorial y el espacio de estados del sistema, respectivamente, y los campos
representan los estados, el campo vectorial y el espacio de estados del sistema, respectivamente, y los campos  tienen la forma
tienen la forma
los cuales se definen sobre las regiones disyuntas

Estas regiones son separadas en el espacio de estados por las fronteras de conmutación
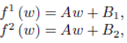
Además, A ∈ R2×2, B1 ∈ R2×1 y B2 ∈ R2×1 son matrices reales definidas en los parámetros α, β > 0, b1 ƒ= b2 ƒ= 0, de la forma

Por tanto, el sistema (1) se puede reescribir a través del sistema de ecuaciones diferenciales autónomas
 ()2
()2
2.1 Estado estacionario
Sean los sistemas dinámicos
 ()3
()3
lineales y no homogéneos, cuyas soluciones vienen dadas por
 ()4
()4
A partir de las condiciones iniciales w0 i = (x 10 i, x 20 i ) T se pueden escribir como
 ()5
()5
y al resolver el sistema lineal Aw + Bi = 0 o w = −A −1 Bi se obtienen las soluciones de equilibrio de los sistemas (3), es decir
 ()6
()6
Estas soluciones o puntos de equilibrio son focos asintóticamente estables si α < 0, focos inestables si α > 0 y centros si α = 0. En cualquier caso β > 0 determina la velocidad del ángulo rotación de las trayectorias alrededor de estos puntos. Estos puntos se aproximan o se alejan de las fronteras de la banda al cambiar el valor de los parámetros
bi
, desplazándolos a través de una recta que pasa por en el origen y es paralela al vector  en el espacio de estados14.
en el espacio de estados14.
Cada uno de los sistemas (3) tiene su correspondiente solución de equilibrio (6) cuyo valor numérico difiere de acuerdo con el valor de
bi
, es decir, existirá un único punto de equilibrio si se cumple que b
1 = b
2. Si  , coexistirán los dos puntos de equilibrio en el plano de estados y será el valor de α el que determine la estabilidad de dichos puntos.
, coexistirán los dos puntos de equilibrio en el plano de estados y será el valor de α el que determine la estabilidad de dichos puntos.
2.2 Órbitas periódicas
En esta sección se utiliza el Teorema de la Función Implícita (2.1) y el Criterio de Desigualdad Triangular15 para determinar las condiciones tanto iniciales como paramétricas que garantizan la existencia de órbitas periódicas en el sistema (2), 16),(17.
Teorema 2.1. (( 18 )). Teorema de la Función Implícita. Sean F j (z, µ) : Rn×Rk → R, j − aplicaciones C 1 , (z 0 , µ 0) ∈ R n ×R k una solución del sistema F j (z, µ) = 0 y JF j (z 0 , µ 0) ƒ= 0, entonces existe un entorno abierto U ⊆ R k y V ⊆ R n del punto (z 0 , µ 0), respectivamente. Tales que, existe una única aplicación f: U → V , para la cual F j (f (µ), µ) = 0 para todo µ ∈ U . Donde, z 0 = f (µ 0) y f (µ) es C 1 para todo µ ∈ U y z ∈ V .
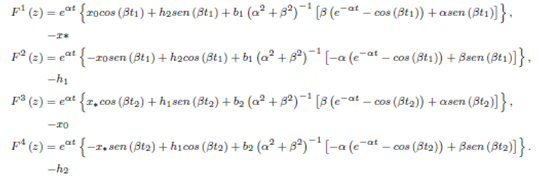
Suponga que el flujo (5) evoluciona a partir de las condiciones iniciales (x 0 , h 2) y (x ∗ , h 1) generando una órbita periódica como se muestra en la Figura 4.
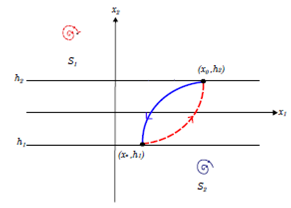
Luego, esta órbita queda determinada por las soluciones del sistema no lineal en ecuaciones implícitas
 () 7
() 7
donde z = (x 0 , x ∗ , t 1 , t 2), µ = ( bi, α, β ); j = 1, .., 4, i = 1, 2.
Es decir,
Si se ajusta el conjunto de parámetros µ del sistema (7) y se satisfacen las condiciones del Teorema de la Función Implícita (2.1) garantizando además que los puntos de equilibrio sean focos (α = 0), entonces se obtienen los respectivos dominios paramétricos que garantizan la existencia de órbitas periódicas entre la banda de histéresis, dados por:
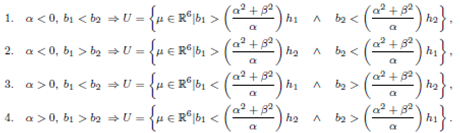 (8)
(8)
Ahora, en el caso que los puntos de equilibrio son centros, es decir, si α = 0, la matriz jacobiana asociada al sistema (7) es nula, por tanto el Teorema de la Función Implícita 2.1 no garantiza la existencia de órbitas periódicas entre las fronteras de la banda de histéresis. Para este caso, se considera el flujo de cada sistema lineal y el Criterio de Desigualdad Triangular para garantizar su existencia.
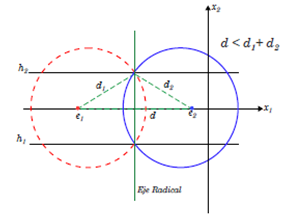
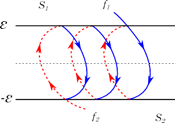
Como se observa en la Figura 5 los puntos de equilibrio además de ser colineales sobre el eje de las abscisas poseen órbitas periódicas entorno a cada uno de ellos. Al interceptarse estás órbitas, ellas lo hacen en dos puntos en común contenidos sobre un eje que se conoce como radical. De esta forma, se garantiza la existencia de infinitas órbitas periódicas que:
Satisfacen las condiciones de la Desigualdad Triangular d < d 1 + d 2, donde, d es la distancia entre los puntos de equilibrio sobre el eje de las abscisas, d 1 y d 2 son las distancias entre los puntos de equilibrio y uno de los puntos de intersección de las circunferencias sobre el eje radical con una y sólo una de las dos fronteras de la banda, respectivamente.
Se encuentran entre las abscisas de los puntos de equilibrio y las fronteras de la banda de histéresis, es decir, entre los intervalos [e 1 , e 2] y [h 1 , h 2], respectivamente.
Teniendo en cuenta estas condiciones y cambiando el valor de los parámetros en el conjunto µ, se obtienen los dominios paramétricos:
3 Simulaciones numéricas
Se implementaron en MATLAB algoritmos numéricos que fueron basados en un esquema de eventos y un mapeo de celdas, para analizar y simular el flujo y los dominios de atracción del sistema (2), respectivamente. Se encontró que al cambiar el valor de ciertos parámetros, existen distintas clases de estado estacionario que van desde una órbita periódica hasta la formación de múltiples atractores, como se describe a continuación.
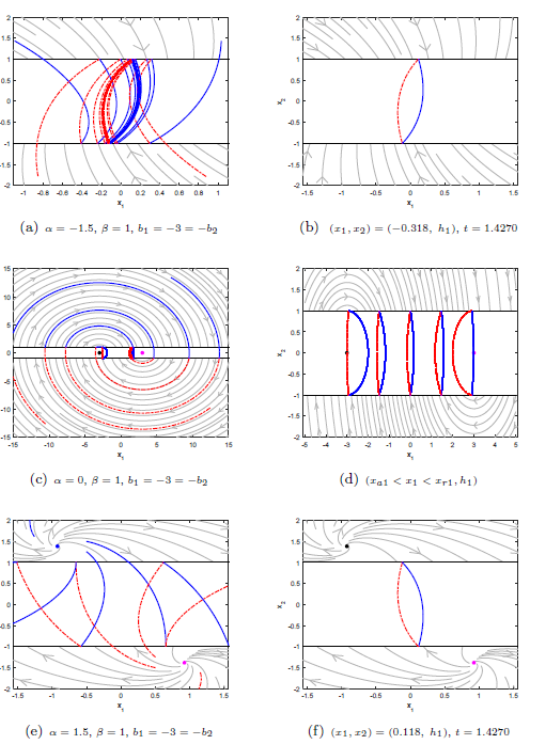
Figura 6: Flujo del SLCH para diferente configuración de los parámetros α, β, b 1 − b 2. La línea azul (continua) indica que el flujo f 1(w) se esta integrando y la línea roja (discontinua) indica que se trata del flujo f 2(w) el que esta evolucionando.
3.1 Soluciones periódicas
Se implementó en MATLAB un algoritmo numérico basado en un esquema de eventos, para analizar y simular la solución del sistema (2). En la parte izquierda de la Figura 6 se muestran diferentes retratos de fase para este sistema y a la derecha sus respectivas órbitas periódicas cuando se consideran diferentes valores de los parámetros.
En la sección 2.1 se establecieron las condiciones bajo las cuales los puntos de equilibrio cambian de estabilidad afectando la dinámica global del sistema; al tomar diferentes condiciones iniciales fuera de la banda de histéresis y al escoger condiciones paramétricas sobre el dominio (8) cuando α < 0 se obtiene el retrato de fase en la Figura 6(a), cuyo estado estacionario corresponde a la órbita periódica de la Figura 6(b).
Ahora, al considerar el valor de las condiciones parámetricas sobre el dominio (9), cuando α = 0, se obtiene el retrato de fases de la Figura 6(c). En este caso, tal como se describió en la sección 2.2, infinitas órbitas periódicas se generan en los intervalos que comprenden las abscisas de los puntos de equilibrio y las fronteras de la banda como se muestran en la Figura 6(d).
Finalmente, al tomar el valor de los parámetros en el dominio (8) para α > 0, se obtiene el retrato de fases en la Figura 6(e) para distintas condiciones iniciales. Particularmente en este caso, la órbita periódica es repulsora por tanto el estado estacionario se reduce a soluciones que se alejan de la banda de histéresis. Sin embargo, al solucionar el sistema de ecuaciones implícitas (7) se obtiene la condición inicial (x 1 , x 2) = (0.118, h 1) y el tiempo de integración t = 1.4270 para el valor de los parámetros α = 1.5, β = 1, b 1 = -3 = -b 2, h 1 = -h 2 = -1, que gen era la órbita periódica en la Figura 6(f). De la misma forma, se obtiene la condición inicial (x 1 , x 2) = ( -0.318, h 1) y el tiempo de integración t = 1.4270 cuando se sustituye el valor de los parámetros: α = -1.5, β = 1, b 1 = -3 = -b 2, h 1 = -h 2 = -1 en el sistema (7).
De acuerdo a los resultados anteriores, una trayectoria puede aproximarse a un punto de equilibrio estable siempre y cuando este punto se encuentre ubicado dentro de la banda de histéresis o sobre su propio campo vectorial como en las Figuras 6(a) y 6(e). Esto implica que un punto de equilibrio desaparecerá en el retrato de fases si su ordenada lo ubica en el campo vectorial del otro sistema lineal como sucede en la Figura 6(c). Teniendo en cuenta esto, es posible tener una configuración de parámetros que permita la coexistencia tanto de puntos de equilibrio estables dentro de la banda de histéresis como de órbitas periódicas atractoras que se generan por la conmutación dentro de la banda. Estos resultados acerca de la multiplicidad de atractores se muestran a continuación.
3.2 Múltiples estados estacionarios
Los resultados en la Figura 6 indican que para una determinada configuración de parámetros la solución de estado estacionario del sistema (2), para toda condición inicial, es única y corresponde a una órbita periódica (Figura 6(a)). No obstante, al seleccionar un valor diferente de los parámetros sobre el dominio (8), se pueden obtener múltiples atractores de diferente tipo, como lo son los puntos de equilibrio del sistema.
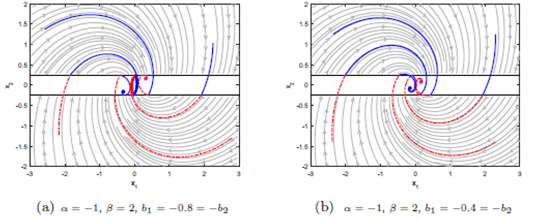
Ahora, suponga que los parámetros tienen los siguientes valores: h 1 = -0.25 α = -1, β = 2, b 1 = -0.8 y b 2 = -b 1 y h 2 = -h 1 y se genera el retrato de fases en la Figura 7(a), en la cual se puede observar que a partir de diferentes condiciones iniciales la trayectoria puede dirigirse a diferentes estados estacionarios, es decir, presenta múltiples atractores. Dos de esos atractores son puntos de equilibrio y el tercero es una órbita periódica que se encuentra entre las fronteras de la banda de histéresis.
Al variar la configuración de parámetros inicial, cambiando b 1 = -0.4, se obtiene el retrato de fases de la Figura 7(b), en éste se observa que la órbita periódica desaparece y por tanto la solución del Sistema sólo puede aproximarse a uno de los dos puntos de equilibrio.
El fenómeno de coexistencia de múltiples estados estacionarios se visualiza con mayor precisión trazando las cuencas o dominios de atracción correspondientes a cada configuración de parámetros escogida, como se presenta a continuación.
3.3 Dominios de atracción
Los resultados obtenidos hasta el momento muestran el papel importante que juegan no sólo el valor de cada parámetro en el sistema y el valor de las fronteras de la banda a la hora de determinar el número de atractores y el tipo de atractor, sino también el valor que deben tomar las condiciones iniciales para garantizar que la trayectoria se aproxime al estado estacionario que se pretende alcanzar. De esta manera, para obtener un resultado preciso acerca de que condiciones iniciales se deben elegir para llegar a un estado estacionario determinado, es necesario trazar sus correspondientes Dominios de atracción19, que en este caso se obtuvieron a partir de un algoritmo basado en un mapeo de celdas implementado en MATLAB 20.
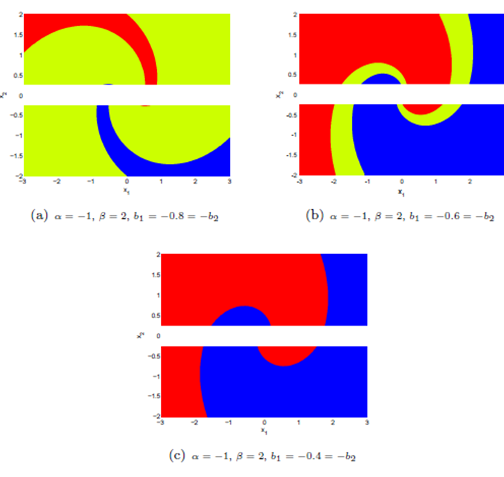
En la Figura 8 se observa una serie de dominios de atracción a medida que el parámetro b 1 aumenta gradualmente pero conservando los demás parámetros del sistema constantes y α < 0, para garantizar que los puntos de equilibrio sean asintóticamente estables.
Teniendo en cuenta lo anterior, se observa un cambio tanto en la forma como en el número atractores que posee cada dominio de atracción. Por ejemplo, en la Figura 8(a) se observa que existen tres atractores, dos de los cuales corresponden a sus puntos de equilibrio y el tercero a una órbita periódica la cual conmuta entre las fronteras de la banda de histéresis. Luego, si se toma una condición inicial sobre la zona en color rojo, la solución del sistema tiende a un estado estacionario, que corresponde al punto de equilibrio  , esto también sucede cuando se toma una condición inicial sobre lazona en color azul, pero en este caso la solución se aproxima al punto de equilibrio
, esto también sucede cuando se toma una condición inicial sobre lazona en color azul, pero en este caso la solución se aproxima al punto de equilibrio  . Finalmente, si la condición inicial se elige sobre la zona en color am arillo la solución del sistema se dirige a la órbita periódica generada por la conmutación del flujo del sistema con las fronteras de las banda de histéresis.
. Finalmente, si la condición inicial se elige sobre la zona en color am arillo la solución del sistema se dirige a la órbita periódica generada por la conmutación del flujo del sistema con las fronteras de las banda de histéresis.
Como se mostró en la sección 3.2, al aumentar en un valor mínimo el parámetro b 1, se observa que el número de atractores que se obtiene para la Figura 8(b) se conserva para la Figura 8(a), pero con la diferencia que el tamaño de sus zonas de atracción en color azul y color rojo se incrementa y en cambio el tamaño de su zona atracción en color amarillo disminuye. Si nuevamente se incrementa el valor del parámetro b 1, se observa que la zona en color amarillo desaparece lo que significa que el flujo del sistema paso de poseer tres atractores a poseer dos de ellos, es decir, que para cualquier condición inicial que se escoja sobre estas zonas, las trayectorias se dirigen únicamente a uno de los dos puntos de equilibrio del sistema como se muestra en la Figura 8(c).
4 Conclusiones
Se analizó el comportamiento de un sistema dinámico lineal suave a trozos en R2, cuyo flujo conmuta con una banda de histéresis. Dentro de este análisis, se estudió el comportamiento de cada uno de los flujos de los sistemas dinámicos lineales que conforman el sistema no suave, determinando analíticamente sus soluciones y las soluciones de equilibrio, las cuales se desplazan por una recta que pasa por el origen del plano de fases. A partir de la solución del sistema no lineal y de las ecuaciones implícitas se determinó el conjunto de parámetros que garantiza la existencia de órbitas periódicas dentro las fronteras de la banda de histéresis.
A partir de un algoritmo basado en un esquema de eventos se trazaron los retratos de fase y dominios de atracción para diferentes configuraciones de los parámetros. Se determino que mientras los puntos de equilibrio sean asintóticamente estables, es decir, α < 0, se pueden presentar múltiples atractores de diferente tipo en el sistema. Esto significa que diferentes valores de los parámetros pueden generar diferente número de atractores.
Se desarrollo un algoritmo de mapeo de celdas y se determinaron los dominios de atracción con el objetivo de indicar las regiones sobre las cuales las condiciones iniciales producen trayectorias que conducen a un estado estacionario de interés. Se realizo una secuencia de dominios de atracción aumentando levemente uno de los parámetros y se observó un cambio en el número de atractores. Este fenómeno está asociado a una bifurcación la cual sera presentada en un trabajo futuro.

