










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkRevista Científica General José María Córdova
Print version ISSN 1900-6586
Rev. Cient. Gen. José María Córdova vol.14 no.18 Bogotá Dec. 2016
Herramienta didáctica para ensayos cuasi-estáticos de pequeños especímenes estructurales*
Educational Tool for quasi-Static Testing of Small Structural Specimens
Support pédagogique pour des essais quasi-statiques de petits spécimens structurels
Ferramenta didática para ensaios quase-estáticos de pequenos espécimenes estruturais
Julián Carrillo a
Pahola Porras Rodríguez b
Martha Sánchez Cruz c
* Artículo asociado al Proyecto IMP-ING-2130 de la Universidad Militar Nueva Granada, Bogotá Colombia.
a Universidad Militar Nueva Granada, Bogotá, Colombia. Doctor en Ingeniería. Profesor e Investigador, Departamento de Ingeniería Civil, Universidad Militar Nueva Granada, UMNG, Bogotá, Colombia. Email: wjcarrillo@gmail.com.
b Universidad Militar Nueva Granada, Bogotá, Colombia. Ingeniero en Mecatrónica. Grupo de Investigación Estructuras y Sísmica, Universidad Militar Nueva Granada, UMNG, Bogotá, Colombia.
c Universidad Militar Nueva Granada, Bogotá, Colombia. Doctora en Ingeniería. Profesora e Investigadora, Departamento de Ingeniería Civil, Universidad Militar Nueva Granada, UMNG, Bogotá, Colombia.
Recibido: 23 de abril de 2016 • Aceptado: 28 de mayo de 2016
Resumen
El artículo propone una herramienta didáctica para aplicar carga cuasi-estática durante ensayos de pequeños elementos y sistemas estructurales. Inicialmente, se evalúa la magnitud de las fuerzas que se aplican a los especímenes por medio de simulaciones realizadas en SolidWorks y Labview. Luego, se seleccionan actuadores, con capacidades de 300 kN, 50 kN y 20 kN y se ensamblan al marco de carga del laboratorio. Después, se realiza el diseño y evaluación de los elementos del sistema hidráulico, tales como la bomba, válvulas y tarjeta de potencia eléctrica. A continuación, se realiza el diseño de los sistemas de control por fuerza y desplazamiento y el sistema de adquisición de datos. Estos sistemas consisten en un controlador proporcional y en un bloque conector para adquirir las señales definidas para el sistema, respectivamente. Se espera que el sistema propuesto promueva actividades académicas y de investigación sobre el desempeño de pequeños modelos estructurales sometidos a diferentes tipos de fuerzas cuasi-estáticas.
Palabras clave: actuadores, ensayos, herramienta didáctica, pequeños especímenes, sistema de control, sistema hidráulico.
Abstract
The paper proposes an educational tool for applying quasi-static loads during tests on small structural elements and systems. The magnitude of forces applied to prototypes is initially evaluated using simulations carried out in SolidWorks and Labview. Actuators having capacities of 300 kN, 50 kN and 20 kN were then selected and connected to the load frame of the Lab. Design and assessment of the elements of the hydraulic system, such as the pump, valves and the electric power board, were then performed. After that, the design of the load and displacement control system and the acquisition system, were designed. These systems involve a proportional controller and a connector block to acquire the signals defined by the system, respectively. It is expected that the proposed system promotes academic and research activities on the performance of small structural models subjected to different types of quasi-static forces.
Keywords: actuators, control system, educational tool, hydraulic system, small specimens, tests.
Résumé
L'article propose un outil didactique pour appliquer une charge quasi-statique durant des essais de petits éléments et de systèmes structurels. On évalue initialement la taille des forces qui s'appliquent aux spécimens au moyen des simulations sont réalisées dans SolidWorks y Labview. Ensuite, des actuateurs sont sélectionnés avec capacités de 300 kN, 50 kN et 20 kN, et sont assemblés au cadre de charge du Laboratoire. Après on réalise la conception et l'évaluation des éléments, tels que le système hydraulique comme la bombe, les soupapes et la carte de puissance électrique. Ensuite on réalise la conception des systèmes qui est composé d'un dispositif de contrôle proportionnel par force et déplacement, et le système d'acquisition de données. Ces systèmes sont constitués d'un contrôleur proportionnel et un autre bloc connecteur pour acquérir les signaux définis pour le système, respectivement. Il s'attend que le système proposé encourage les activités académiques et de recherche sur la performance de petits modèles structurels soumis à différents types de forces quasi-statiques.
Mots-clés: actuateurs, essais, outil didactique, petits spécimens, système de contrôle système hydraulique.
Resumo
O artigo propõe uma ferramenta didática para aplicar carga quase-estática durante ensaios de pequenos elementos e sistemas estruturais. Inicialmente é avaliada a magnitude das forças que são aplicadas aos espécimenes através de simulações realizadas em SolidWorks e Labview. Imediatamente depois, são selecionados atuadores com capacidades de 300 kN, 50 kN e 20 kN. Estes atuadores são ensamblados ao marco de carga do Laboratório. Depois é realizado o desenho e avaliação dos elementos que compõem o sistema hidráulico, tais como a bomba, as válvulas e a placa de energia elétrica. A continuação é feito o desenho dos sistemas de controle por força e deslocamento, e do sistema de aquisição de dados. Estes sistemas são compostos por um controlador proporcional e um bloco de ligação que permite adquirir os sinais definidos para o sistema, respectivamente. Se espera que o sistema proposto possa promover atividades acadêmicas e de pesquisa relacionadas ao desempenho de pequenos modelos estruturais submetidos a diferentes tipos de forças quase-estáticas.
Palavras-chave: atuadores, ensaios, ferramenta didática, pequenos espécimenes, sistema de controle, sistema hidráulico.
Introducción
La ingeniería estructural se ocupa del diseño y cálculo de las obras de infraestructura, tales como edificaciones y puentes. Su finalidad es lograr estructuras seguras, funcionales y económicas. Para evaluar la seguridad de los elementos y sistemas estructurales, calibrar modelos analíticos y predecir el comportamiento de las estructuras, se deben realizar ensayos de laboratorio que permitan observar y validar experimentalmente el desempeño de las estructuras (Carrillo et al., 2015). La práctica actual del diseño de estructuras sometidas a carga sísmica está basada principalmente en resultados experimentales de elementos o sistemas estructurales sometidos a carga cíclica, utilizando tasas de deformación cuasi-estáticas. La fortaleza principal de los ensayos cuasi-estáticos recae en su relativa economía y practicidad.
Durante el desarrollo de los programas experimentales para estructuras se requieren dispositivos complejos para la generación y medición de fuerzas y desplazamientos y sistemas versátiles de adquisición de datos. Desde 1990, la ingeniería mecatrónica se ha definido como una ingeniería multidisciplinaria, relacionada con sistemas modernos y que está en constante evolución (Potkonjak et al., 2010). Un sistema mecatrónico está conformado por dispositivos electrónicos, mecánicos, sensores y actuadores, de tal manera que éstos son operados y controlados por comandos programados desde software. Esta ingeniería tiene la capacidad de innovar sistemas mecánicos que generan ventajas en términos de cinemática y dinámica de movimiento de cargas, y que son evaluados por medio de simulaciones. El rol de la ingeniería mecánica, dentro de la ingeniería mecatrónica, está basado en aspectos tales como el diseño, la operación y la interacción mecánica de un sistema de tareas. Estos aspectos son utilizados para analizar el movimiento del sistema y la carga, considerando la flexibilidad y el control (Maas et al., 2012). En general, los sistemas más utilizados para aplicaciones automatizadas son los sistemas hidráulicos y neumáticos.
En este artículo se propone y discute una metodología para desarrollar una aplicación didáctica para ingeniería estructural, a partir de un sistema hidráulico de aplicación de cargas cuasi-estáticas.
Inicialmente, se discuten las ventajas y desventajas de los sistemas hidráulicos y neumáticos y se selecciona el sistema más adecuado para este tipo de aplicaciones. El sistema hidráulico presentado está configurado para manipular actuadores con capacidades de carga de 300 kN, 50 kN y 20 kN. En el artículo también se describen los resultados obtenidos con un control proporcional y una tarjeta electrónica para la comunicación durante los ensayos. Para validar el sistema propuesto se realizaron ensayos con pequeños elementos estructurales sometidos a esfuerzos de flexión.
Ventajas y limitaciones de los tipos de ensayos
Cuando se desea estudiar el desempeño sísmico de una estructura o elemento estructural, existen básicamente tres métodos para obtener información de tipo experimental: ensayos cuasi-estáticos, ensayos dinámicos en mesa vibratoria y ensayos seudo-dinámicos. Como su nombre lo indica, los ensayos seudo-dinámicos son una combinación entre los ensayos cuasi-estáticos y dinámicos. A continuación, se discuten las principales ventajas y debilidades de los ensayos dinámicos y cuasi-estáticos.
Ensayos dinámicos en mesa vibratoria
Se reconoce ampliamente que los ensayos en mesa vibratoria constituyen el mejor método para reproducir, con alto grado de fidelidad, los efectos dinámicos que los sismos imponen a las estructuras o elementos estructurales. Este tipo de ensayos tiene ventajas significativas respecto a los ensayos cuasi-estáticos. Por ejemplo, los especímenes pueden ser sometidos a registros reales de aceleración sísmica para investigar los efectos dinámicos y, al mismo tiempo, las fuerzas y desplazamientos relativos son generados por la respuesta dinámica propia de la estructura. En contraste, durante los ensayos cuasi-estáticos no se tiene certeza de la historia de desplazamientos o fuerzas que deben aplicarse a la estructura (Calvi et al., 1996). Sin embargo, Diming et al. (1999) y Krawinkler (2000) han reconocido que existen desventajas y limitaciones que aumentan el grado de complejidad en este tipo de ensayos, por ejemplo: (a) el costo elevado de instalación y mantenimiento de mesas vibratorias de gran tamaño para el ensayo de estructuras en escala real, (b) el tamaño del espécimen está limitado por la capacidad de la mesa vibratoria, (c) los efectos de escala pueden ser importantes en la evaluación de la degradación y de los modos de falla locales de los ensayos a escala reducida, (d) los problemas de control debidos a la interacción mesa vibratoria-espécimen o por el cabeceo no deseado de la mesa vibratoria durante el movimiento, (e) el riesgo de daño de la mesa vibratoria y del equipo e instrumentación circundante por llevar estructuras a escala real hasta el colapso.
Cuasi-estáticos
En este tipo de ensayos, la historia de carga o deformación se aplica a una velocidad suficientemente baja, de tal forma que se considera casi de forma estática. Los ensayos cuasi-estáticos monótonos y cuasi-estáticos cíclicos se clasifican dentro de esta categoría.
La práctica actual del diseño de estructuras sometidas a carga sísmica está basada principalmente en resultados experimentales de elementos o sistemas estructurales sometidos a carga cíclica, utilizando tasas de deformación cuasi-estáticas. Estas tasas son significativamente menores que las asociadas a las frecuencias de la excitación sísmica (Shah et al., 1987). La fortaleza principal de los ensayos cuasi-estáticos recae en su relativa economía y practicidad. Calvi et al. (1996) reconocen las siguientes ventajas de los ensayos cuasi-estáticos en comparación con los ensayos dinámicos: (a) la aplicación de fuerzas de magnitud considerable a los especímenes es relativamente más fácil, (b) los ensayos al colapso de especímenes a escala levemente reducida o de estructuras a escala natural requieren de equipo menos costoso, (c) el agrietamiento y la propagación del daño se pueden observar detalladamente y, (d) los desplazamientos y, especialmente las fuerzas, pueden medirse de forma más precisa.
Aunque los ensayos cuasi-estáticos son más fáciles de llevar a cabo, están limitados para proporcionar información acerca del comportamiento dinámico de especímenes ensayados bajo carga sísmica. En general, en el protocolo de carga simplificado de esta técnica de ensayo se ignoran los efectos dinámicos que se observan en estructuras sometidas a acciones sísmicas (Bertero et al., 1977). En particular, los efectos de la tasa de deformación continúan generando algunas dudas sobre la confiabilidad de estos métodos (León y Deierlein, 1996). De acuerdo con Krawinkler (2000), en los ensayos que no se llevan a cabo usando tasas de deformación reales pueden mostrar diferencias con la realidad. Cuando se estudia el comportamiento sísmico de especímenes a partir de ensayos cuasi-estáticos, se corre el riesgo de hacer interpretaciones incorrectas de los resultados, principalmente en los siguientes casos: (a) el modo de falla predominante del elemento está influenciado por las tasas de deformación, (b) el material que gobierna el comportamiento es frágil, como en el caso del concreto y la mampostería, (c) las características de sobrerresistencia son un parámetro importante de la respuesta y, (d) la capacidad de desplazamiento (deriva o ductilidad) y disipación de energía son parámetros importantes (León y Deierlein, 1996; Rai, 2001).
En los casos anteriores, no es claro si los datos obtenidos de los ensayos cuasi-estáticos se pueden considerar como un límite inferior conservador de la capacidad. A pesar de que algunos estudios experimentales muestran que sí se puede realizar la suposición señalada, no se ha estudiado con detalle qué factores afectan la subestimación o sobrestimación de la capacidad en materiales que exhiben degradación significativa de sus propiedades, tales como el concreto y la mampostería (León y Deierlein, 1996), y qué tan relevantes son esos factores en la modificación de las propiedades.
Si se consideran las diferencias, ventajas y desventajas entre los ensayos dinámicos y cuasi-estáticos, una buena estrategia es usar una combinación de ellos, con el fin de ajustar o correlacionar el comportamiento cuasi-estático con el dinámico, de modo de estimar el comportamiento de los muros sometidos a acciones sísmicas reales.
Así, se podrían estudiar con más detalle las variables en ensayos cuasi-estáticos y tener ensayos dinámicos que repitan sólo algunos de los casos más representativos.
Carrillo y Alcocer (2013) han establecido este tipo de correlaciones cuantitativas entre ensayos dinámicos y cuasi-estáticos cíclicos, de muros de concreto para vivienda de baja altura. Estas correlaciones son de gran utilidad para la interpretación de resultados de ensayos cuasi-estáticos cíclicos, así como para la calibración de modelos histeréticos y de predicción de comportamiento que han sido obtenidos a través de ensayos cuasi-estáticos.
Comparación entre sistemas neumáticos e hidráulicos
En comparación con los sistemas neumáticos, los sistemas hidráulicos presentan ventajas para implementar el control, debido a que se requiere menor número de pasos para realizar la regulación de la velocidad del actuador. El sistema hidráulico también permite que cada componente maneje el fluido de manera conveniente, según la aplicación, es de fácil operación y control, de manera que permite la implementación de la automatización en forma remota. Por otro lado, en el sistema hidráulico generalmente se usa aceite mineral, el cual, además, lubrica el mecanismo, lo que mejora la vida útil de los componentes. Por otro lado, un sistema neumático tiene algunas desventajas para implementar el control; por ejemplo, la diferencia de presión que se presenta en las cámaras de los actuadores dificulta la exactitud del movimiento del actuador, el comportamiento de la compuerta del actuador es influenciado por los tiempos donde no hay transmisión de movimiento, lo que resulta en un asincronismo entre la compuerta y el pistón del actuador; el sistema es poco confiable cuando el control de las válvulas cambia con la frecuencia, el tiempo de pilotaje de parada de la válvula de control causa poca fiabilidad, el sistema genera alto nivel de ruido e inconvenientes en la regulación del sistema. Adicionalmente, el sistema neumático tiene baja presión, componentes grandes y pesados y altos costos de mantenimiento (Kopacek et al., 2000). Muchos de los problemas de control de los pistones neumáticos son debidos a la incompresibilidad del aire, lo que no ocurre con los sistemas hidráulicos; sin embargo, pese a esto, por sus características físicas, peso y dimensión, los pistones neumáticos se utilizan cuando las presiones de la aplicación así lo permiten. Con base en la superioridad de los sistemas hidráulicos para implementar su control, éstos han sido estudiados a partir de la modelación matemática de la velocidad, la fricción y la relación dinámica entre ambas (Junying y Jianhai, 2009).
Los sistemas hidráulicos se controlan por medio de sistemas analógicos o digitales (Huang y Cao, 2011). Los sistemas digitales son considerados como una alternativa competente con respecto al control tradicional con servo-válvulas o válvulas proporcionales, ya que el control digital ofrece ventajas tales como ruido tenue, repetibilidad mayor, menos sensible a perturbaciones y económico para mantenimiento.
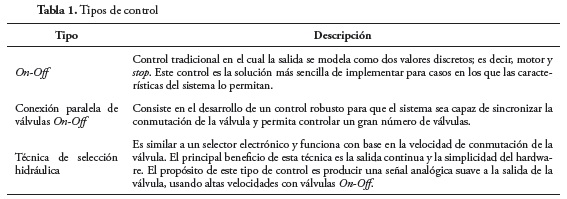
Los tipos de control digital que se han implementado en los sistemas hidráulicos se muestran en la tabla 1.
Existen propuestas de dos tipos de convertidores de conmutación hidráulicos: de onda y de resonancia. El convertidor de onda consiste en una válvula de selección y dos tuberías de distribución, en donde una tubería se conecta a la mitad del recorrido de la otra línea de distribución. De este modo, la presión de salida en la línea de distribución es casi constante, debido a la presión producida en el sistema y la conmutación del ciclo útil de la válvula. El convertidor de resonancia consiste en una válvula de selección, un actuador con retorno de muelle y un acumulador. La cámara del actuador es conectada alternativamente entre el tanque y la línea de distribución. El convertidor de resonancia controla casi de forma independiente la presión de consumo y la velocidad de flujo promedio para la línea de distribución (Ma et al., 2011).
Adicionalmente, los convertidores hidráulicos pueden ser implementados por medio de un motor hidráulico, en donde la bobina funciona como un convertidor de conmutación, de manera que se pueda imitar un selector electrónico. Los modos de selección electrónica de presión (paso y bloqueo) controlan la presión de salida por medio del ciclo útil del PWM (siglas en inglés de Pulse-width modulation) en alta velocidad para una válvula On-Off, de tal manera que este sistema es usado como un sistema de carga. El ciclo útil es dividido en dos estados: periodo de almacenamiento y periodo libre.
Las simulaciones para sistemas mecánicos, neumáticos e hidráulicos de una dimensión, denominados AMESim (siglas en inglés de Advanced Modeling Environment for Performing Simulator), comparan los tipos de convertidores y la salida cuasi-lineal continua (Ma et al., 2011). Debido a que los convertidores pueden ser usados para implementar el control de los actuadores, el diseño de los controladores de posición también se ha desarrollado por medio de la teoría cuantitativa de realimentación, de manera que se identifican las frecuencias de respuesta aceptables para el sistema (Yao et al., 2010). Otro tipo de controlador usado en estos sistemas es un PID (siglas en inglés de Proportional-Integral-Derivative) con sincronismo óptimo. Con este controlador se pueden realizar simulaciones en un ambiente compuesto Dspace, Matlab, Simulink y Real-time Workshop, en donde el comportamiento de los controladores es verificado en un sistema hidráulico controlado por posición.
Metodología para el desarrollo y discusión del sistema mecatrónico propuesto
En la figura 1 se indican los lineamientos considerados para desarrollar los subsistemas hidráulicos aquí propuestos. La caracterización de los actuadores consistió en determinar el recorrido del émbolo, las dimensiones de la camisa y el tipo de platina necesario para ensamblar el actuador en el marco de carga. Luego, se definió el tipo de control requerido para realizar los ensayos.
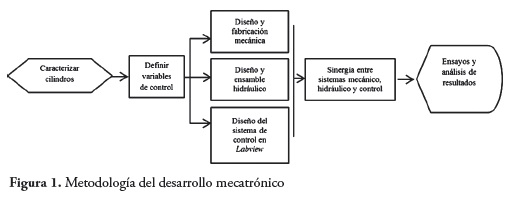
En este estudio se decidió desarrollar un sistema de control por desplazamiento y por fuerza, el cual se implementó en el software Labview. Luego se definió el programa por eventos del usuario, el cual está conformado por varios subprogramas (denominados SubVI en Labview). Para determinar la descripción del ensayo de manera más sencilla, el sistema hidráulico se desarrolló después de definir las características mecánicas y de control. Finalmente, se realizó la sinergia de los sistemas desarrollados y se realizaron ensayos con pequeños elementos estructurales sometidos a esfuerzos de flexión.
Criterios para la selección de los actuadores
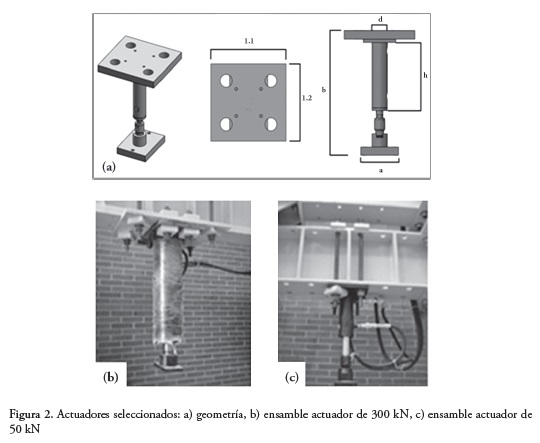
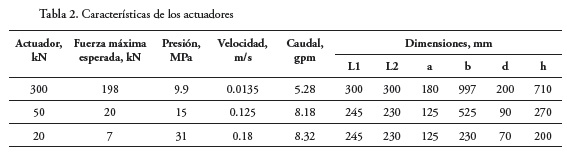
La geometría y las dimensiones de los actuadores seleccionados se muestran en la figura 2a y en la tabla 2, respectivamente. Para la selección de los actuadores se evaluó la fuerza máxima que ejercería el émbolo en los especímenes. Para especímenes en forma de cilindros con diámetro, d, de 150 mm, y largo, l, de 300 mm, la fuerza máxima de compresión diametral, P1, se calculó por medio de la ecuación 1. Para resistencia a compresión, fc', igual a 45 MPa, la fuerza máxima esperada es de 308 kN y, por tanto, se escogió un actuador con capacidad de 300 kN.
Para especímenes en forma de vigas con longitud simplemente apoyada, l, de 450 mm, ancho, b, y altura, d, de 150 mm, la fuerza máxima, P2, se calculó por medio de la ecuación 2.
Para resistencia a compresión, fc', igual a 45 MPa, la fuerza máxima esperada es de 28 kN y, por tanto, se seleccionó un actuador de 50 kN. Para especímenes en forma de cilindros y vigas en escala reducida se seleccionó un actuador de 20 kN.
Para los actuadores de 300 kN, 50 kN y 20 kN, la presión del sistema, p, y la velocidad de salida del vástago, v, se calcularon por medio de las ecuaciones 3, donde F es la fuerza, A es el área del cilindro de cada actuador, y L y t corresponden a la distancia y el tiempo del recorrido, respectivamente. Las presiones y las velocidades obtenidas también se muestran en la tabla 2.
Diseño del subsistema mecánico y fabricación de la armazón
El diseño de los actuadores se realizó con base en las demandas máximas esperadas de presión y velocidad. Para el ensamble mecánico de los actuadores a la viga principal del marco de carga del Laboratorio de Estructuras de la UMNG, se fabricaron dos platinas con área de 700 mm × 440 mm y perforaciones de 27 mm (17/16 in) para la conexión por medio de espárragos. Para el ensamble de los actuadores al espécimen se fabricó una platina con área de 600mm×600mm y 25.4 mm (1 in) de espesor, con perforaciones de 31.8 mm (1¼ in) para la conexión por medio de tornillos. Adicionalmente, se diseñó una platina superior para el ensamble de los actuadores en el marco de carga, tal como se muestra en las figuras 2b y 2c. Finalmente, los actuadores fueron ubicados en el marco de carga (ver figura 3). Para los tres actuadores se utilizó la misma unidad de potencia hidráulica y, por tanto, se colocaron acoples de instalación rápida a los conectores de los actuadores y las mangueras para permitir un cambio rápido de cilindro. El subsistema mecánico se configuró de tal forma que los tres cilindros se pueden montar simultáneamente en el marco y así la selección del cilindro requiere ya sea la movilización de las mangueras, o bien, un conmutador (selector) hidráulico.
Integración del subsistema electro-hidráulico y ensamble
El caudal del subsistema hidráulico se calculó para conocer el tipo de bomba hidráulica que funcionaría con el sistema. Para los tres actuadores, el caudal se estimó por medio de la ecuación 4,
donde V es el volumen de fluido contenido en el cilindro, h es la altura del cilindro, y t es el tiempo necesario para llenar la cámara del cilindro. Los caudales obtenidos se muestran en la tabla 2. Con base en los resultados anteriores, se seleccionó una bomba de engranes de 8 gpm, con motor marca WEG de 7.5 HP y 1800 rpm. La válvula proporcional se seleccionó con base en la presión máxima de 15 MPa (≈ 150 bares = 2175 psi). Para ajustar el diseño a los modelos comerciales y utilizando un factor de seguridad de 1.25, se empleó una presión máxima del sistema de 20.7 MPa (≈ 207 bares = 3000 psi) para las válvulas y el acumulador. De esta manera, se seleccionaron dos válvulas de control, una direccional y otra proporcional direccional; esta última permite regular el caudal. La válvula de control proporcional es de marca Continental, de referencia VSDO3M-3L-6-33L-A, la cual funciona con presión de trabajo de 20.7 MPa (3000 psi) y presión máxima de operación de 35 MPa (5000 psi). La válvula de control está equipada con doble solenoide, 3 posiciones, corriente máxima de operación de 2.1 A, con voltaje de alimentación de 24 VDC (voltaje de corriente directa), y caudal de 10 gpm. Por otro lado, la válvula de control proporcional direccional es de marca Continental, de referencia VEP03M-B225-GD-24L-A, con presión de trabajo de 22.5 MPa (3265 psi) y presión máxima de operación de 31.4 MPa (4560 psi). Esta válvula está equipada con un solo solenoide, corriente máxima de operación de 1.1 A, y caudal de 3.1 gpm. El acumulador seleccionado es de marca Acumulators, con presión de operación de 20.7 MPa (3000 psi).
Luego, se seleccionó una tarjeta electrónica para accionar la bomba y la válvula de control direccional. La tarjeta acondiciona las señales por medio de un circuito integrado de referencia 74LS244, el cual funciona como buffer (amplificador para adaptar impedancias), y utiliza una fuente de 24 VDC para la alimentación.
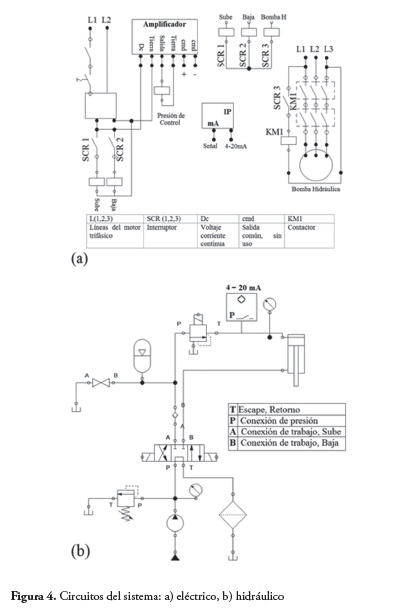
En la figura 4a se muestra el circuito eléctrico utilizado para aplicar los comandos a la bomba, donde se observa la distribución de las señales para el ensayo; se conectaron tres señales identificadas como “bomba”, “baja” y “sube”. La señal identificada como “bomba H” indica la activación del relé de estado sólido para activar la bomba. La señal “baja” se identificó para bajar el émbolo del actuador y acercarlo al espécimen. La señal identificada como “sube” se utilizó para subir el émbolo del actuador. Para realizar la acción de control se genera una señal a la válvula proporcional y así regular el caudal del sistema.
En cuanto a la tarjeta eléctrica, se seleccionó una tarjeta marca Continental Hydraulics, de referencia ECM4-L1-P12P-C. Esta tarjeta funciona como un amplificador y cuenta con un diseño para operar en un intervalo de voltaje de 0 a 10 V. La señal de voltaje de entrada es convertida en una salida de corriente a partir de un pulso de modulación.
La corriente es controlada de manera proporcional al voltaje de entrada y cuenta con corriente límite no sólo para evitar la sobresaturación de la válvula proporcional, sino también para proteger el circuito. Con base en la configuración de los selectores en la tarjeta, para el pulso de modulación se seleccionó una frecuencia de 60 Hz y la salida de corriente es una señal tipo rampa de 0.3 a 30 s.
Finalmente, el circuito hidráulico propuesto se muestra en la figura 4b, donde se observa que la válvula cuenta con dos solenoides, así como con señales “baja” y “sube” para direccionar el émbolo del actuador. La válvula de control proporcional se encuentra conectada en la línea de distribución para subir el actuador de tal manera que, si no se aplica una corriente de alimentación mínima de 4 mA, el actuador no sube porque la electroválvula no permite el paso del fluido. En tal caso, el sistema se puede presurizar y no es recomendable intentar conectar o desconectar las mangueras de acceso porque se puede generar un accidente a causa de la presión acumulada.
Diseño de los sistemas de control y de adquisición de datos
Los sistemas de control y de adquisición de datos se implementaron en la herramienta Labview. Para realizar el control de un sistema, inicialmente se deben estudiar las señales de entrada y salida. En la tabla 3 se muestran las señales que se utilizan durante los ensayos de los especímenes.
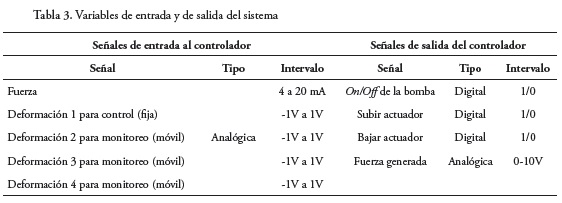
En general, se diseñó un sistema con cinco entradas analógicas, cuatro entradas de voltaje de -1V a 1V, las cuales corresponden a los sensores o LVDT que son acoplados al dispositivo del espécimen para medir la deformación, y una entrada de corriente de 4 a 20 mA, la cual corresponde a las señales “mA” y “IP” de la figura 4a. Para las señales de salida se crearon tres señales digitales y una señal analógica de 0 a 10 V, la cual corresponde a la válvula de control proporcional que se utiliza para regular el caudal del sistema.
Para brindar versatilidad al sistema, se planteó un sistema con un controlador proporcional para una planta de orden 1. En este controlador proporcional, el usuario puede cambiar la fuerza a la que desea llevar el actuador (Offset o valor inicial) con base en los parámetros de ensayo. Los resultados de simulaciones demostraron que el tiempo de asentamiento del sistema es de 3 s; este tiempo es el que se tarda el sistema en alcanzar el estado deseado.
El sistema de adquisición de datos se desarrolló por medio de una tarjeta marca National Instruments, de referencia SCC-68, con entradas analógicas y digitales. Adicionalmente, la tarjeta cuenta con un módulo de corriente de referencia SCC-CI20, de 4 a 20mA, y un módulo de referencia SCC-SG-24 para sensores de puente completo con voltaje de excitación máxima de 10 V. El programa desarrollado en Labview está conformado por varios subprogramas SubVI, en donde se definen los parámetros del ensayo. De esta manera, es más fácil entender el código y guiar al usuario por las secciones que conforman el programa.
Para comenzar a ejecutar un ensayo de un espécimen, se despliega un menú principal donde se pregunta al usuario el tipo de actuador que desea emplear; por ejemplo, 300 kN, 50 kN o 20 kN. Luego, se debe ejecutar el ensayo y se despliega otro SubVI, donde se realiza la configuración de la etapa. Para los ensayos, se pueden utilizar dos tipos de aplicación de carga; es decir, aumentar la fuerza con velocidad determinada por el usuario o estudiar el desempeño del material, manteniendo la fuerza y posición durante un intervalo de tiempo especificado por el usuario. Adicionalmente, en este menú se deben definir las unidades de medida que se utilizarán en el ensayo.
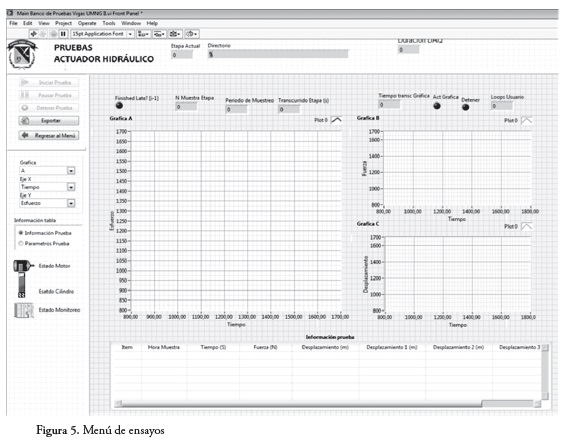
Después de la configuración básica del ensayo, se muestra una ventana en donde se realiza el monitoreo y la adquisición de datos en tiempo real, tal como se muestra en la figura 5. Al iniciar el ensayo, el software envía una señal al relé de la tarjeta eléctrica para encender la bomba, por medio de la tarjeta SCC-68. Con base en la configuración realizada por el usuario, se controla el tiempo durante el cual está encendida la bomba y la corriente que se genera para aumentar la presión de la bomba y, de esta manera, aumentar la fuerza aplicada al espécimen. Al terminar el ensayo, los datos obtenidos de fuerza vs. tiempo, desplazamiento vs. tiempo y esfuerzo vs. tiempo, son exportados en formato TDMS para luego procesarlos y analizarlos en un programa comercial tal como Excel.
Caso de estudio
Para verificar el desempeño del sistema desarrollado, se realizaron ensayos cuasi-estáticos que permiten caracterizar el desempeño a compresión y a flexión de vigas de concreto reforzado con y sin fibras de acero, según los lineamientos de las normas ASTM-C-39 y ASTM-C-1609, respectivamente. Aunque NSR-10 (AIS, 2010) permite el uso de concreto reforzado con fibras de acero, no se indican ecuaciones para estimar sus propiedades mecánicas bajo cargas cuasi-estáticas.
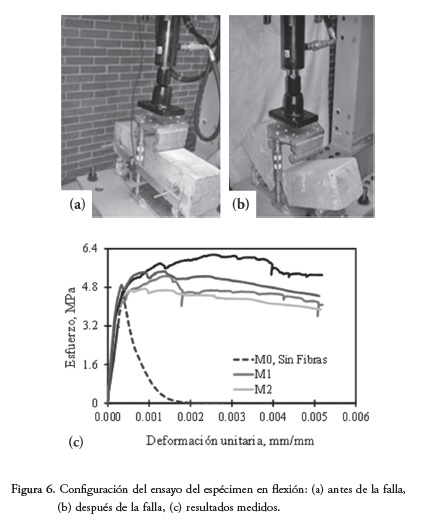
Para el ensayo a flexión de vigas, la carga se debe aplicar a una velocidad constante hasta generar la primera fisura. Después la carga se debe aplicar a la velocidad necesaria para que se incremente constantemente el esfuerzo entre 0.86 MPa y 1.21 MPa. Luego, se registró un tiempo de respuesta de 3.5 s del sistema. En general, a la viga se le aplicó una fuerza de 26 kN después de acercar el actuador al espécimen. En la figura 6 se muestra la configuración del ensayo, la falla del espécimen y las curvas típicas carga-deflexión medidas durante los ensayos. Con base en los resultados reportados por Carrillo et al. (2014) y Gallo et al. (2014), el sistema aquí propuesto permitió evaluar adecuadamente el desempeño de los especímenes hasta la fecha; es decir, se logró medir adecuadamente no solo la capacidad de resistencia, sino también la capacidad de desplazamiento, la disipación de energía y la tenacidad mecánica asociada a diferentes estados límite.
Conclusiones
Con fines de innovación en los laboratorios de ingeniería de materiales y estructuras, es primordial desarrollar sistemas didácticos para realizar prácticas de docencia con estudiantes e investigación formativa experimental. De esta manera, es posible estudiar, de forma eficiente, el comportamiento real de los materiales y sistemas estructurales usados por los ingenieros civiles. La práctica actual del diseño de estructuras sometidas a carga sísmica está basada principalmente en resultados experimentales de elementos o sistemas estructurales sometidos a carga cíclica, utilizando tasas de deformación cuasi-estáticas. En el artículo se ha presentado una metodología para desarrollar un sistema hidráulico con actuadores de 300 kN, 50 kN y 20 kN, los cuales se utilizan en ensayos cuasi-estáticos sobre elementos estructurales. Para el desarrollo del estudio, se examinaron las ventajas de los sistemas hidráulicos sobre los sistemas neumáticos, para este tipo de ensayos y se demostró que los sistemas hidráulicos son más exactos en sus movimientos porque permiten un mejor control de los elementos que componen el sistema.
El sistema propuesto se ha utilizado exitosamente en estudios experimentales donde se han evaluado elementos estructurales. Las ventajas del sistema propuesto fueron verificadas a partir de las observaciones y los resultados medidos durante el ensayo a flexión de vigas de concreto sometidas a cargas verticales cuasi-estáticas. En general, este estudio ha representado una aplicación práctica de los sistemas mecatrónicos a la instrumentación relacionada con la ingeniería estructural, en beneficio de la comunidad académica e investigadora, tales como los estudiantes de ingenierías Mecatrónica y Civil. Los autores consideran que la metodología y los resultados presentados en este artículo son una herramienta eficiente para que otros centros de investigación, con recursos económicos limitados, puedan desarrollar sistemas propios de aplicación de carga que permitan estudiar el comportamiento de materiales y pequeños sistemas estructurales sometidos a excitaciones cuasi-estáticas.
Agradecimientos
Los autores agradecen a la Vicerrectoría de Investigaciones de la Universidad Militar Nueva Granada, UMNG, por el apoyo económico del proyecto IMP-ING-2130. El contenido de este artículo representa exclusivamente la opinión de los autores y no refleja la opinión de los patrocinadores y/o colaboradores.
Referencias
1. AIS (2010). Reglamento colombiano de construcción sismo resistente, NSR-10. Asociación Colombiana de Ingeniería Sísmica, AIS. Ministerio de Ambiente, Vivienda y Desarrollo Territorial. [ Links ]
2. Ball, D. & Barney, G. (1975). Application of multivariable control theory to hydraulic models. Proceedings of the Institution of Electrical Engineers, 122(2), 209-212. [ Links ]
3. Bertero, V., Popov, E., Wang, T. & Vallenas, J. (1977). Seismic design implications of hysteretic behavior of reinforced concrete structural walls. Proceedings of the 6th World Conference on Earthquake Engineering, India, 1898-1904. [ Links ]
4. Calvi, G., Kingsley, G. & Magenes, G. (1996). Testing of masonry structures for seismic assessment. Journal of Earthquake Spectra, 12(1), 145-163. [ Links ]
5. Carrillo, J., & Alcocer, S. (2013). Experimental investigation on dynamic and quasi-static behavior of low-rise RC walls. Journal of Earthquake Engineering and Structural Dynamics, 42(5), 635-652. [ Links ]
6. Carrillo, J., Barrera, A. & Acosta, D. (2014). Evaluación del desempeño a tensión por compresión diametral del concreto reforzado con fibras de acero ZP-306. Ingeniería y Competitividad, 16(1), 55-66. [ Links ]
7. Carrillo, J., Riveros, F. & Llano, L. (2015). Dispositivo para sujeción de múltiples transductores de desplazamiento en ensayos de losas de concreto. Ingeniería Mecánica: Tecnología y Desarrollo, 5(2), 313-319. [ Links ]
8. Diming, J., Shield, C., French, C., Bailey, F. & Clarck, A. (1999). Effective force testing: A method of seismic simulation for structural testing. Journal of Structural Engineering - ASCE, 125(9), 1028-1037. [ Links ]
9. Gallo, L., González, G. & Carrillo, J. (2014). Comportamiento del concreto reforzado con fibras de acero ZP-306 sometido a esfuerzo de compresión. Ciencia e Ingeniería Neogranadina, 23(1), 117-133. [ Links ]
10. Goulbourne, N. (2009). A mathematical model for cylindrical fiber reinforced electro-pneumatic actuators. International Journal of Solids and Structures, (46), 1043-1052. [ Links ]
11. Huang D. y Cao L. (2011). Study on hydraulic system design of mine bucket. Proceedings FPM, 1002-1005. [ Links ]
12. Junying, T. & Jianhai, H. (2009). Research on extension element model in hydraulic system. Proceedings International Conference on Mechatronics and Automation, Changchun, China, 1583-1588. [ Links ]
13. Karpenko, M. & Sepehri, N. (2010). On quantitative feedback design for robust position control of hydraulic actuators. Control Engineering Practice, (18), 289-299. [ Links ]
14. Kopacek, P. (2006). Improving stability in developing nations through automation. Proceedings Conference on Supplemental Ways for Improving International Stability Through Automation, Prishtina, Kosovo. [ Links ]
15. Krawinkler, H. (2000). A perspective on experimental research in earthquake engineering. Journal of Earthquake Technology, 37, III-IV. [ Links ]
16. León, R. & Deierlein, G. (1996). Considerations for the use of quasi-static testing. Journal of Earthquake Spectra, 12(1), 87-109. [ Links ]
17. Liu, G. & Daley, S. (2000). Optimal tuning nonlinear PID control of hydraulic systems. Control Engineering Practice, (8), 1045-1053. [ Links ]
18. Ma, T., Mao, Y., Hu, J., Wang, D. & Chen, J. (2011). Simulation and experiment study of dynamic performance for a hydraulic mount using AMESim. Proceedings International Conference on Electronic & Mechanical Engineering and Information Technology, 3696-3699. [ Links ]
19. Maas, S., Zarbes, A., Waldmann, D., Waltering, M., Bungard, V. & Roeck, G. (2012). Damage assessment of concrete structures through dynamic testing methods. Part 1 Laboratory tests. Engineering Structures, (34), 351-362. [ Links ]
20. Potkonjak, V., Vukobratovia, M., Jovanovia, K. & Medenica, M. (2010). Virtual mechatronic robotic laboratory: A step further in distance learning. Computers and Education, (55), 465-475. [ Links ]
21. Rai, D. (2001). Slow cyclic testing for evaluation of seismic performance of structural components. Journal of Earthquake Technology, 38(1), 31-55. [ Links ]
22. Shah, S., Wang, M. y Chung, L. (1987). Model concrete beam-column joints subjected to cyclic loading at two rates. Journal of Materials and Structures, 20(116), 85-95. [ Links ]
23. Tran, X., Hafizah, N. & Yanada, H. (2012). Modeling of dynamic friction behaviors of hydraulic cylinders. Mechatronics, (22), 65-75. [ Links ]
24. Wang, F., Gu, L. & Chen, Y. (2011). A continuously variable hydraulic pressure converter based on high speed on off valves. Mechatronics, (21), 1298-1308. [ Links ]
25. Yao, J., Fu, W., Hu, S. & Liu, S. (2010). XPC based real time control system for an electro-hydraulic servo shaking table. Proceedings 8th World Congress on Intelligent Control and Automation, Jinan, China, 2026-2030. [ Links ]
26. Zhihong, Z., Yunxin, W. & Changxun, M. (2011). Simulation and optimization of the driving forces of hydraulic cylinders for boom of truck mounted concrete pump. Proceedings Fourth International Conference on Intelligent Computation Technology and Automation. [ Links ]

