










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkEntre Ciencia e Ingeniería
versão impressa ISSN 1909-8367
Entre Ciencia e Ingenieria vol.10 no.19 Pereira jun. 2016
Desarrollo e interacción de un laboratorio virtual asistido y controlado por PLC1
Development and interaction of a virtual laboratory assisted and controlled by PLC
Desenvolvimento e interação de um laboratório virtual assistido e controlado por PLC
C. A. Cáceres* y D. Amaya**
1 Producto derivado del proyecto de investigación INO 1638 "Laboratorio virtual aplicado al control de procesos industriales". Presentado por el Grupo de Investigación Grupo de Aplicaciones Virtuales GAV, de la Universidad Militar Nueva Granada.
* C. A. Cáceres Asistente de Investigación en el Grupo de Aplicaciones Virtuales GAV de la Facultad de Ingeniería, Departamento de Ingeniería en Mecatrónica, de la Universidad Militar Nueva Granada, Bogotá D-C. (Colombia); email: u1801466@unimilitar.edu.co.
* D. Amaya Docente de tiempo completo e investigador principal del Grupo de Aplicaciones Virtuales GAV de la Facultad de Ingeniería, Departamento de Ingeniería en Mecatrónica, de la Universidad Militar Nueva Granada, Bogotá D-C. (Colombia); email: dario.amaya@unimilitar.edu.co.
Recibido Junio 18 de 2015 – Aceptado Febrero 19 de 2016
Resumen
Hoy en día el elemento básico en la industria es el PLC, cuya función principal es controlar los sistemas y procesos presentes en la industria. El uso de laboratorios virtuales en fases preliminares al completo montaje de las líneas de producción resulta muy útil para ahorrar dinero y tiempo. Se presenta la ventaja de poder tener los controladores y la lógica secuencial ya funcionando en su gran mayoría, antes de tener el sistema completamente listo. Éste artículo presenta un desarrollo e implementación de un ambiente virtual de una banda trasportadora en una cervecería. A través del protocolo OSC, el laboratorio virtual y el PLC, puede comunicarse y lograr una emulación del sistema real en un ambiente virtual, donde el PLC ha sido programado como se haría para una industria.
Palabras clave: Laboratorio virtual, modelo matemático, modelo virtual, PLC.
Abstract
Nowadays, the basic element to be used in the industry is the PLC, whose main function is to control the systems and processes in the industry. The use of virtual labs in preliminary stages in the complete assembly of the production lines helps to save money and time. It gives the advantage of having controllers and sequential logic mostly working, before having the system completely ready. This paper presents the development and implementation of a virtual environment of a conveyor belt in a brewery. Through the OSC protocol, the virtual laboratory and the PLC can communicate and achieve emulation of the real system in a virtual environment, where the PLC has been programmed as it would be done for an industry.
Key words: Virtual laboratory, mathematical model, Virtual model, PLC.
Resumo
Hoje em dia o elemento básico da indústria é o PLC, cuja função principal é controlar os sistemas e processos presentes na indústria. A utilização de laboratórios virtuais em montagem completa de estágios preliminares das linhas de produção é muito útil para economizar tempo e dinheiro. Apresenta-se a vantagem de poder ter os controladores e a lógica sequencial já funcionando em maior parte, antes de ter o sistema completamente pronto. Este artigo apresenta um desenvolvimento e implementação de um ambiente virtual de um conjunto de transportadores de cervejaria. Através do protocolo OSC, o laboratório virtual e o PLC, podem comunicar-se e alcançar uma emulação do sistema real em um ambiente virtual, onde o PLC foi programado como seria feito para uma indústria.
Palavras chave: Laboratório virtual, modelo matemático, modelo virtual, PLC.
I. Introducción
Los sistemas automáticos modernos usan en su gran mayoría PLCs, los cuales se encargan de coordinarlos. Claramente, la industria actual requiere ingenieros con grandes capacidades y conocimientos en automatización. Uno de los mayores retos es encontrar la manera de enseñar la programación de los PLCs a los estudiantes [1].
La programación del PLC es usualmente enseñada en cursos de automatización de pregrado, donde muchos centros educativos no tienen los recursos para que sus estudiantes sean usuarios competentes de los PLCs [2]. Las desventajas de los laboratorios tradicionales y los sistemas físicos son principalmente que requieren mantenimiento constante, inversión y adecuación de un gran espacio para su uso, la mayoría de estos factores no pueden ser resueltos fácilmente por instituciones educativas [1] [3] [4]. Afortunadamente casi todos estos problemas pueden ser resueltos por medio del uso de laboratorios virtuales, que además de presentar facilidades de espacio y uso, algunos estudios han demostrado que la enseñanza virtual del uso de los PLCs es muy útil en el entorno académico enfocado a la capacitación profesional [5].
En [6] se desarrolló un laboratorio virtual con la facilidad de ser accesible para los estudiantes a experimentos en el área de la electrónica y la automatización por medio de internet comunicándose a un software de simulación como lo es Simulink de Matlab, donde se accede a diferentes modelos con opción de controlarlos y editar ciertas características. En [7] se proponen dos laboratorios virtuales con un enfoque a la enseñanza de diferentes estrategias de control digital de una planta, el primero ofrece una herramienta para asistencia por ordenador y experimentos prácticos estructurados. El segundo ofrece un ambiente Matlab, que permite a los usuarios crear y diseñar experimentos de control bajo el lenguaje Matlab.
En [8] se propone una alternativa al problema de la alta demanda de equipos de automatización y control por parte de las universidades, que son modelos de máquina implementados en un ambiente virtual, con el propósito de sustituir todos estos componentes. Ya en [9] se presenta una aplicación real de un proceso industrial, inmerso en un laboratorio virtual, que se enfoca en el diseño técnico, el desarrollo y operación del laboratorio en tiempo real, demostrando los principios de la automatización industrial.
Existen diferentes tipos de laboratorios virtuales, por ejemplo el planteado por [10] propone un laboratorio virtual y remoto con acceso desde un teléfono celular, pero con elementos únicamente discretos y presentados en 2D. En [11] se plantea un modelo virtual y remoto para ser controlado con un PLC mostrando el sistema controlado con gráficos similares a los sistemas SCADA. En [12] se realiza un laboratorio remoto con trasmisión de video de la planta real y con el uso de un PLC físico. Por otro lado en [13] [14] [15] [16] se proponen laboratorios virtuales que simulan diferentes entornos para el aprendizaje de distintos tópicos.
Desde el punto de vista industrial, el uso de laboratorios virtuales nace con la necesidad de optimizar el tiempo de desarrollo de los proyectos. En las plantas industriales, el montaje de cualquier sistema o proceso, toma un gran tiempo, al cual se le suma el periodo de programación y verificación de los algoritmos diseñados para el PLC. Con el uso de un laboratorio virtual, se pueden realizar el montaje del sistema o proceso, y paralelamente programar el PLC correspondiente al proceso que se está ensamblando y verificarlo por medio del laboratorio virtual, dicho método optimiza el tiempo de desarrollo del proyecto, lo cual implica un ahorro de dinero.
Los software de simulación de los PLC pueden ser clasificados en PLC Virtual y Entorno Virtual [1]. Un Entorno virtual, lleva al mundo virtual el controlador y el proceso, por otro lado el PLC virtual, tiene un proceso real y un PLC virtual [1] [17]. En este trabajo se presenta un proceso virtual y un PLC real, lo cual puede clasificarse en un sistema "Híbrido Real-Virtual" en un sistema de manufactura automática. La principal ventaja es que la programación del PLC real puede ser probada y verificada antes de terminar el proceso real, desde los eventos discretos, diseñados por GRAFCET hasta los temporizadores, controladores PID y demás.
El presente artículo se divide en cinco secciones. Primero se muestra un breve estado del arte, objetivos y justificación del trabajo. Posteriormente se muestra el método en que se desarrolló el trabajo y los materiales utilizados. Seguidamente los resultados que mostró en el desarrollo del trabajo. Por último las conclusiones obtenidas del trabajo y las referencias.
II. Materiales y Métodos
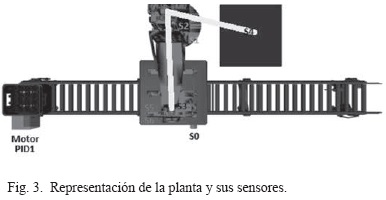
El desarrollo del laboratorio virtual propuesto está conformado por el control de una banda transportadora, cuya principal función es movilizar contenedores con botellas dentro de una cervecería. Al final de la banda, se encuentra un manipulador encargado de retirar las botellas y ubicarlas en otra sección de la línea de producción.
El procedimiento utilizado para llevar a cabo este trabajo está compuesto por tres etapas, la primera es la definición del proceso y sus componentes, posteriormente se encuentran los modelos matemáticos en tiempo continuo del proceso a controlar, así como del controlador, y por último se establece el protocolo de comunicación, la integración del ambiente virtual y el desarrollo del software, para elaborar la integración de variables, hardware y software. En la Fig. 1 se presenta un esquema general que explica lo dicho anteriormente.
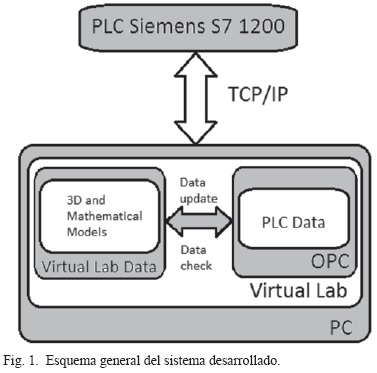
Para el desarrollo fue utilizado un PLC Siemens S7-1200 conectado a un ordenador a través de un protocolo OPC, con el propósito de enviar comandos al ambiente virtual y efectuar las acciones de control pertinentes al proceso simulado.
Definición del proceso y sus componentes
El proceso seleccionado para la elaboración del laboratorio virtual es una banda transportadora para movimiento de botellas en una fábrica de cerveza, debido a que este proceso cuenta con todos los elementos que pueden encontrarse en cualquier área de la industria, como manipuladores, controladores, bandas de transporte, sensores, entre otros.
Se presenta el proceso de la banda trasportadora como una máquina de estados con sus correspondientes variables y estados, en las tablas 1 y 2 respectivamente.
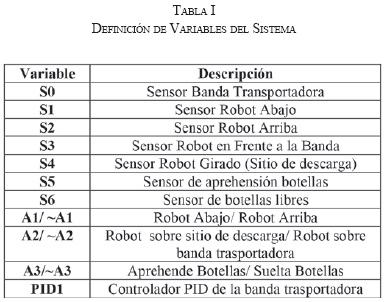
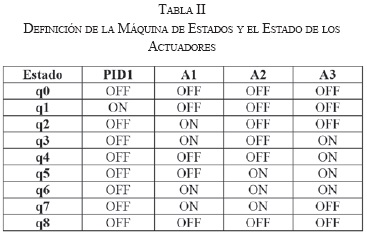
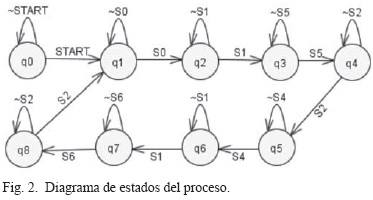
Una vez se ha realizado la definición de las variables y sus estados, se elaboró el esquema mostrado en la Fig. 2, que ilustra de mejor manera el comportamiento de la máquina en cada una de las etapas del proceso.
La ubicación de los sensores dentro del proceso modelado es como se muestra en la Fig. 3, la mayoría de estos están relacionados directamente con el movimiento del manipulador, debido a la cantidad de movimiento que debe realizar.
Modelo matemático y discretización
Tras definir el proceso como una máquina de estados es importante conocer qué va a controlar el PID1 de la Tabla 1. El proceso análogo a controlar es la velocidad de la banda trasportadora. El cual se basa en un motor DC controlado por armadura [14].
Primero se desarrolla el modelo del motor, el cual se pone en términos de la velocidad angular que posteriormente se relaciona con la velocidad de la banda. Posteriormente se discretiza el modelo matemático, todo con el objetivo de tener una mejor aproximación a la dinámica real del sistema.
Por otro lado el modelo del motor se toma según [14] como una aproximación del mismo, donde: w(s) es la velocidad angular del motor, Va(s) el voltaje de entrada del motor, K1 y K2 constantes del sistema,  donde Va es el voltaje de armadura, Ra la resistencia de armadura, Kma es una constante dada dependiente del motor que relaciona la corriente de entrada de armadura (la) con el torque resultante del motor (Tm)
donde Va es el voltaje de armadura, Ra la resistencia de armadura, Kma es una constante dada dependiente del motor que relaciona la corriente de entrada de armadura (la) con el torque resultante del motor (Tm) representa el campo electromagnético inducido por la rotación de la bobina en un campo magnético que es proporcional a la velocidad angular wVb(s) = Kb + w(s), J es la carga inercial del eje del motor, La la bobina de la armadura del motor y c el coeficiente de viscosidad [14].
representa el campo electromagnético inducido por la rotación de la bobina en un campo magnético que es proporcional a la velocidad angular wVb(s) = Kb + w(s), J es la carga inercial del eje del motor, La la bobina de la armadura del motor y c el coeficiente de viscosidad [14].

Si se asume que el tiempo constante del circuito eléctrico es mucho más pequeño que el tiempo constante de la dinámica de carga, la función de transferencia anterior queda como la siguiente ecuación [14].

Que en términos de K1 y K2

Aplicando la transformada inversa de Laplace


El método de discretización se basa en la definición de la derivada, donde: f es una función cualquiera, f1 la derivada de f, T el tiempo de muestreo.

Y discretizándola por la definición de la derivada, se obtiene la velocidad angular del motor.


Sabiendo que la velocidad V de la banda transportadora, es igual a V(K) = w(K)r, donde r es el radio del rodillo donde está conectado el motor. Se obtiene la ecuación 1, la cual corresponde a la velocidad de la banda trasportadora. Dicha ecuación en diferencias fue programada en el laboratorio virtual para lograr que la banda transportadora funcione con una gran similitud al modelo real.

Protocolo de comunicación
Para la comunicación entre el PLC real y el laboratorio virtual se empleó el protocolo TCP/IP, el cual fue utilizado junto a el protocolo OPC de cliente y servidor. El cliente es el computador con el proceso virtual desarrollado en Java (Processing), y el servidor OPC fue desarrollado en C#. Dicho servidor puede ser usado en el mismo PC o en uno remoto. El cliente OPC actualiza la información del laboratorio virtual escribiendo y leyendo variables. El último paso es seleccionar las marcas, las entradas y las salidas del PLC, para que correspondan a las entradas o salidas del laboratorio virtual.
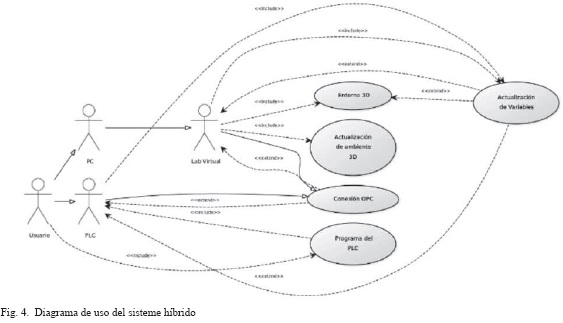
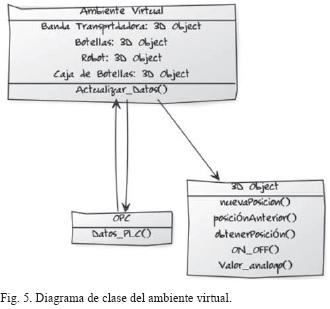
El diagrama de uso del software corresponde a la Fig. 4 y el diagrama de clases a la Fig. 5, donde se puede apreciar el diseño y estructura del programa desarrollado.
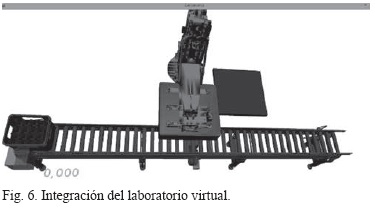
Integración del ambiente virtual y desarrollo de software
El proceso de ensamble es requerido para organizar el entorno virtual y todos los modelos 3D realizados en el software CAD. Es importante definir las limitaciones del entorno, las funciones, las dinámicas, entradas, salidas, definición de variables, verificación y validación del sistema. En este proceso se utilizó el lenguaje de programación Java, en Processing. El entorno virtual se muestra en la Fig. 6.
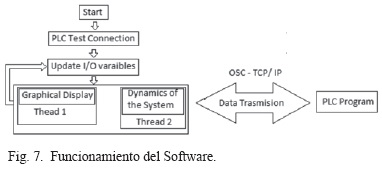
Por otro lado el software trabaja con dos hilos asíncronos, cada uno con una función específica en el laboratorio virtual. El primero se encarga del proceso gráfico del laboratorio, y el segundo se encarga de calcular constantemente las respuestas discretas o dinámicas del sistema. Cada hilo actualiza sus variables en cada nuevo cuadro de pantalla (frame). Se puede apreciar un diagrama del funcionamiento del software en la Fig. 7.
Integración de variables
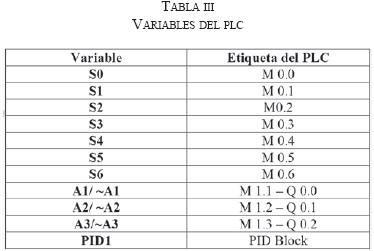
La integración de las variables entre el PLC y el laboratorio virtual son ubicadas en la memoria del PLC. Donde cada registro de memoria de una variable del PLC corresponde a una entrada o salida del laboratorio virtual. Los registros de memoria del PLC están dados por bytes, por lo tanto, al interpretarse la memoria del PLC se logra el trabajo conjunto entre el laboratorio virtual y el PLC.
La tabla 3 muestra la asignación de variables del PLC, que posteriormente indicará si son una variable de lectura o escritura del laboratorio virtual. De acuerdo a la nomenclatura de las variables del PLC si tienen la letra M, son marcas internas del PLC; las que tienen la letra I son entradas y la letra Q son salidas.
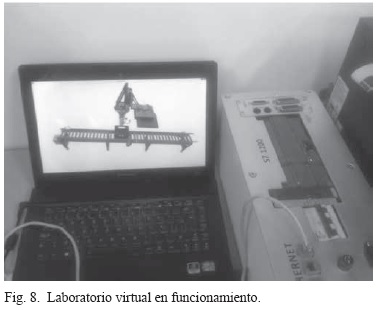
Integración de hardware y software
La conexión entre el PLC y el laboratorio virtual, el protocolo OPC y las variables del laboratorio virtual trabajaron según lo esperado con el programa del PLC desarrollado. Se logró ver la interacción entre el laboratorio virtual y el PLC real, controlando salidas reales del PLC (Q 0.0, Q 0.1 y Q 0.2 - correspondientes a los actuadores 1,2 y 3) según los requerimientos del laboratorio virtual. En la Fig. 8, se puede ver el laboratorio virtual en funcionamiento.
III. Resultados
Del desarrollo del laboratorio virtual se realizó un sistema SCADA, para el completo desarrollo y visualización de un sistema de producción real. El sistema SCADA tuvo como fin monitorear las variables del laboratorio virtual de manera remota. La interfaz gráfica del sistema SCADA, se puede ver en la Fig. 9.
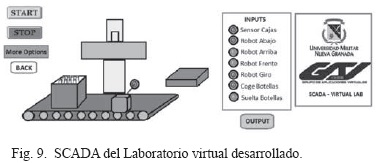
El sistema SCADA se integró al sistema híbrido y se comportó como funcionaría con un sistema SCADA de supervisión de una planta real, lo cual indica que el acceso a la memoria del PLC de una manera adecuada, puede permitir al PLC funcionar normalmente y sin contratiempos.
Por otro lado el sistema se controló en su parte discreta por los diagramas "ladder" o de escalera, basados en el lenguaje GRAFCET. La solución fue implementada por medio del software TIA Portal 12, basada en la máquina de estados de la figura 2.
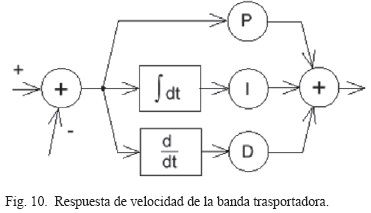
El control del sistema se realizó por medio del método de auto-sintonía que posee el PLC siemens s7-1200, se utilizó una estructura PID convencional basada en la Fig. 10. la cual se sintonizó de manera automática utilizando el laboratorio virtual.
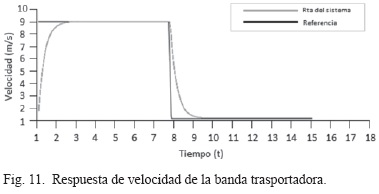
La respuesta del sistema, en su parte análoga fue obtenida desde el laboratorio virtual. Se puede verificar en la Fig. 11 que la velocidad de la banda trasportadora sistema es estable y sigue a la referencia.
IV. Conclusiones
A través de la interfaz SCADA y el protocolo OPC fue posible integrar una planta virtual a la PLC para replicar el comportamiento real de un proceso automatizado, logrando una aplicación que trae consigo beneficios económicos y de tiempo en el sector de educación o industrial.
Por otro lado, el uso del laboratorio virtual para el manejo de plantas en sistemas híbridos da idea de exploración y desarrollo práctico en la educación actual, utilizando la tecnología no sólo como fuente de información sino como entorno experimental, mejorando de esta manera el proceso de aprendizaje y abriendo más oportunidades a diferentes formas de aprender.
Es importante tener en cuenta la gran similitud que presenta este laboratorio con el entorno real, desde el punto de vista de funcionamiento y dinámicas de los sistemas. Permitiendo al usuario familiarizarse con los procesos de automatización antes de interactuar con sistemas físicos.
Agradecimientos
A la vicerrectoría de investigaciones de la Universidad Militar Nueva Granada, por la financiación del proyecto INO 1638 del año 2014.
Referencias
[1] Y. Zheng, "Research on Virtual Experiment System on PLC," in Advances in Computer Science, Environment, Ecoinformatics, and Education, IEEE, Ed., Berlin, Springer Berlin Heidelberg, 2011, pp. 552 - 556. [ Links ]
[2] S. Hsieh, Hsieh, P.Y. y Zhang, D, «Web-based simulations and intelligent tutoring system for programmable logic controller,» Frontiers in Education, vol. 33, pp. 1-23, 2003. [ Links ]
[3] A. Zafer y Omur, A, «A Web-Based Remote Access Laboratory,» IEEE Transactions on Education, vol. 52, nº 1, p. 52.126, 2009. [ Links ]
[4] Ferrero, A., Salicone, S., Bonora, C. y Parmigiani, M., «ReMLab: a Java-based remote, didactic measurement laboratory,» IEEE Transactions on Instrumentation, vol. 52, pp. 710-715, 2003. [ Links ]
[5] T. J. McConnell, J. M. Parker, J. Eberhardt, M. J. Koehler y M. A. Lundeberg, «Virtual Professional Learning Communities: Teachers' Perceptions of Virtual Versus Face-to-Face Professional Development,» Journal of Science Education and Technology, vol.22, nº 3, pp. 267-277, 2013. [ Links ]
[6] L. Lingyun y W. Haijun , «A New Method for Building Web-based Virtual Laboratory,» de ISITAE '07. First IEEE International Symposium on Information Technologies and Applications in Education, Kunming, 2007. [ Links ]
[7] U. Suzana y K. Jezernik, «Virtual Laboratory for Creative Control Design Experiments,» IEEE, vol. 51, nº 1, pp. 69-75, 2008. [ Links ]
[8] E. Salazar y M. Macias, «Virtual 3D controllable machine models for implementation of automations laboratories,» de FIE '09. 39th IEEE Frontiers in Education Conference, 2009, San Antonio, TX, 2009. [ Links ]
[9] P. Skocik, P. Neumann y Fac. of Appl. Inf., Tomas Bata Univ. in Zlin, Zlí, «Industrial process in laboratory environment,» de 2013 International Conference on Process Control (PC), Strbske Pleso, 2013. [ Links ]
[10] A. Safavi, A. A. Safavi y P. Veisi, «A Remote and Virtual PLC Laboratory Via Smartphones,» The 4th International Conference on e-Learning and e-Teaching ICELET, vol. 4, pp. 63 - 68, 2013. [ Links ]
[11] Y. Zheng, «Research on Virtual Experiment System on PLC Education Based on Teaching Materials,» de Advances in Computer Science, Environment, Ecoinformatics, and Education, Springer Berlin Heidelberg, 2011, pp. 552-556. [ Links ]
[12] E. Besada-Portas y J. A. Lopez-Orozco, «Remote Control Laboratory Using EJS Applets and TwinCAT Programmable Logic Controllers,» IEEE TRANSACTIONS ON EDUCATION, vol. 56, nº 2, pp. 156 - 164 , 2013. [ Links ]
[13] Z. zeng, M. Hu, D. Li y Y. Liu, «Distributed Virtual Laboratory System Based on Java/Corba,» Circuits, Communications and System (PACCS), 2011 Third Pacific-Asia Conference on, pp. 1-4, 2011. [ Links ]
[14] W. Guo, Y. Gao y Y. Wang, «Design and Realization of the Interactive Virtual Laboratory Based on VRML,» Consumer Electronics, Communications and Networks (CECNet), 2012 2nd International Conference on, vol. 2, pp. 2510-2513, 2012. [ Links ]
[15] A. Villar-Zafral, S. Zarza-Sanchezl, J. A. Lazaro-Villal y R. Fernandez-Cantil, «Multiplatform Virtual Laboratory for Engineering Education,» Remote Engineering and Virtual Instrumentation (REV), 2012 9th International Conference on, vol. 9, pp. 1-6, 2012. [ Links ]
[16] D. Demeter y J. Banský, «Virtual Laboratory for the e-Learning Education in the Electronics Technologies,» Electronics Technology (ISSE), 2012 35th International Spring Seminar on, vol. 35, pp. 476-480, 2012. [ Links ]
[17] M. Hincapié, M. d. J. Ramírez, A. Valenzuela y J. A. Valdez, «Mixing real and virtual components in automated manufacturing,» International Journal on Interactive Design and Manufacturing (IJIDeM), vol. 8, 2014. [ Links ]
[18] R. C. Dorf y R. H. Bishop, Modern Control Systems, Pentice Hall, 2011. [ Links ]
Camilo Andrés Cáceres Flórez Se graduó como ingeniero en mecatrónica en la Universidad Militar Nueva Granada en Bogotá D.C., Colombia en el 2013. Trabajando principalmente en las áreas de electrónica, control, inteligencia artificial y realidad virtual.
Ha trabajado como asistente de investigación en la Universidad Militar Nueva Granada desde Enero hasta Junio del 2014. Ha obtenido como resultado de sus investigaciones la publicación bibliográfica en ponencias internacionales como; "Multitank fuzzy level controller system using Kinect" en el 2012 y para el 2013 publico "Design and construction of a prototype rehabilitation machine to hand and wrist". Actualmente se ha dedico en la investigación sobre las TIC en Colombia para elaboración de plataformas virtuales para educación a distancia.
Darío Amaya Hurtado. Se graduó como Ingeniero Electrónico en la universidad Antonio Nariño en Bogotá D.C., Colombia en 1995, luego se especializo en Automatización Industrial en la Universidad de los Andes en el año 2000, se graduó como magister en Teleinformática en la Universidad distrital "Francisco José de Caldas" en el 2007 y finalizo sus estudio con el doctorado en Ingeniería Mecánica en la Universidad Estadual de Campinas de Brasil para el 2011. Trabajando principalmente en las áreas de automatización industrial, inteligencia artificial, electrónica y sistemas embebidos.
Ha trabajado como docente para el CIM del SENA, Universidad de San Buenaventura y Universidad Militar Nueva Granada. En el campo de la investigación ha logrado obtener como resultado la publicación del libro "Protección Catódica aplicada a Morteros Alternativos" en el 2013 y artículos como "Sistema de control de una planta embebida en FPGA empleando hardware-in-the-loop", entre otros. Actualmente se desempeña como docente de tiempo completo en la Universidad Militar Nueva Granada e Investigador principal del grupo de investigación GAV, abordando temáticas en las TIC, energía sostenible, bioingeniería y tele cirugía.

