










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkEntre Ciencia e Ingeniería
Print version ISSN 1909-8367
Entre Ciencia e Ingenieria vol.10 no.20 Pereira July/Dec. 2016
Modelado discreto de sistemas dinámicos univariados no lineales con aproximación de primer orden1
Discrete modeling of nonlinear unvaried dynamic systems with first-order approach
Modelagem discreta de sistemas dinâmicos univariados não lineais com aproximação de primeira ordem
O. A. Bellon* y A. Torres**
1 Producto derivado del proyecto "Control Óptimo del Proceso de Pirólisis de Residuos Plásticos Urbanos No Aptos para Reciclaje Primario" desarrollado por el grupo de investigación: Desarrollo y aplicaciones de nuevos materiales, de la Universidad Pedagógica y Tecnológica de Colombia.
* O. A. Bellon, docente en la Escuela de Ingeniería Electrónica, de la Universidad Pedagógica y Tecnológica de Colombia UPTC, Tunja (Colombia); email: oscar.bellon@uptc.edu.co.
** A. Torres, docente en la Escuela de Ingeniería Electrónica, de la universidad Pedagógica y Tecnológica de Colombia UPTC, Tunja (Colombia); email: alvaro.torresa@uptc.edu.co.
Recibido Agosto 02 de 2015 - Aceptado Mayo 30 de 2016
Resumen
Este documento presenta un método para obtener el modelo dinámico de caja negra de un sistema univariado no lineal. Se hace una deducción teórica formal para justificar el procedimiento y se enuncian los pasos a seguir que pueden ser aplicados a cualquier sistema univariado. Dos ejemplos son utilizados para exponer la validez de la metodología: un sistema simulado univariado no lineal y un motor de corriente continua con excitación independiente. En ambos casos, el modelo discreto obtenido por ecuación en diferencias es una linealización por segmentos de la función algebraica entre las variables de entrada y salida. Los parámetros de dicha ecuación son dependientes de la variable de entrada. La metodología expuesta puede ser incluida como práctica experimental en cursos de ingeniería sobre teoría de control, modelamiento y simulación de sistemas dinámicos.
Palabras clave: Modelo de caja negra, modelo discreto, sistema no lineal, sistema univariado.
Abstract
This article shows a method to obtain a black box dynamic model of a nonlinear univariated system. A formal theoretical deduction is proposed to justify the procedure and steps to be followed are reported in order to implement them to any univariated system. Two examples are used to validate the explained methodology: a simulated nonlinear univariated system and a direct current motor separately excited. In both cases, the model obtained by difference equations is a segmented linearization of the algebraic function between both input and output variables. Parameters in that equation are dependent of input variable. The explained methodology can be included as an experimental practice in engineering subjects about control theory, modeling and simulation of dynamic systems.
Key words: Black box model, discrete model, nonlinear system, univariated system.
Resumo
Este documento apresenta um método para obter o modelo dinâmico de caixa preta de um sistema univariado não lineal. Faz-se uma dedução teórica formal para justificar o procedimento e se estabelece os passos a seguir que podem ser aplicados a qualquer sistema univariado. Dois exemplos são utilizados para expor a validade da metodologia: um sistema simulado univariado não lineal e um motor de corrente contínua com excitação independente. Em ambos os casos, o modelo discreto obtido por equação em diferenças é uma linearização por segmentos da função algébrica entre as variáveis de entrada e saída. Os parâmetros de tal equação são dependentes da variável de entrada. A metodologia exposta pode ser incluída como pratica experimental em cursos de engenharia sobre teoria de controle, modelagem e simulação de sistemas dinâmicos.
Palavras chave: Modelo de caixa negra, modelagem discreta, sistema não lineal, sistema univariado.
I. NOMENCLATURA
x: Símbolo general de la variable de salida.
u: Símbolo general de la variable de entrada o variable manipulada.
t: Tiempo en segundos. (S)
Δt: Periodo de muestreo (S).
α0 En sistemas lineales univariados de primer orden representa la pendiente de la recta que relaciona la variable de salida en función de la variable de entrada.
τ: Constante de tiempo en los sistemas de primer orden lineales (S).
xss: Valor finito y constante de la variable de salida de un sistema univariado estable cuando la entrada mantiene un valor finito y constante.
uss: Valor constante aplicado en la entrada que también puede tomarse como la magnitud de la función paso aplicada a un sistema.
ω: Velocidad angular (rad/S).
Vα: Voltaje aplicado en las terminales de armadura de un motor de corriente continua (V).
II. INTRODUCCIÓN
El modelado de procesos dinámicos es un tópico de importancia en el diseño de sistemas de control [1]. Esta etapa es fundamental para la realización de simulaciones a partir de las cuales se pueden evaluar soluciones posibles de acuerdo con objetivos de control y restricciones bien definidas [2]. Desde una perspectiva pedagógica, el modelamiento es un paso previo a la construcción de entornos simulados para apoyar la enseñanza en ingeniería [3]. El aprendizaje de la teoría de control resulta más significativo cuando es apoyado por estrategias pedagógicas que priorizan la visualización del proceso a controlar o al desarrollo de aplicaciones concretas [4], [5]. En este orden de ideas, miembros de la comunidad académica han explorado el uso de herramientas interactivas para la simulación de procesos; desde aplicativos en línea para visualizar el comportamiento de un péndulo hasta la simulación de procesos industriales complejos [6], [7],[8].
El modelado matemático es parte fundamental del desempeño competente de los futuros ingenieros [9],[10]. La capacidad de modelar matemáticamente situaciones en el ámbito laboral es una habilidad necesaria para lograr altos desempeños y a la que se ha dedicado mucho estudio de parte de las instituciones en la construcción de sus proyectos educativos. En la ingeniería, esta capacidad se fomenta mediante la aplicación de las metodologías formales de modelamiento en situaciones reales o en procesos representativos de lo que en un futuro deberá afrontar el ingeniero profesional.
El contenido temático de las asignaturas relacionadas con el control de procesos o el diseño de controladores requiere una fundamentación matemática bien estructurada. Algunas estrategias de control avanzado (Control predictivo, adaptativo, LQR, entre otros) requieren un modelo matemático descriptivo confiable para su implementación exitosa [11]. La gran mayoría de procesos industriales son de tipo no lineal, con parámetros distribuidos y variantes en el tiempo [12], [13]. La linealización alrededor de un punto de operación es la solución que se suele aplicar para aproximar el comportamiento del sistema a los modelos lineales estudiados en control clásico.
En diversas situaciones prácticas, no es factible establecer relaciones conceptuales fundamentales basadas en leyes físicas o químicas. En tal caso, se recurre a métodos de identificación de sistemas denominados de "caja negra" donde la relación es un modelo que tienen en cuenta variables de entrada y salida y los parámetros de las ecuaciones dinámicas no corresponden a propiedades intrínsecas del sistema [14]. Estos métodos no suelen ser parte de cursos de pregrado de ingeniería. En dichos cursos, lo habitual es tratar con sistemas univariados (una entrada una salida) con parámetros concentrados e invariantes en el tiempo [15]. Sin embargo, un sistema que pueda analizarse en un rango amplio más allá del punto de operación, resulta de gran utilidad.
En este documento, se propone un método para modelar sistemas univariados no lineales a partir de conceptos que están a nivel de los cursos básicos de teoría de control y de algunas asignaturas consideradas como prerrequisito. Los pasos descritos han sido organizados y probados en el desarrollo de las asignaturas: Modelado de Sistemas, Instrumentación, Mediciones Eléctricas y Máquinas Eléctricas; dentro de la carrera de Ingeniería Electrónica de la Universidad Pedagógica y Tecnológica de Colombia UPTC. Para validar el procedimiento se utilizó en primer lugar, un sistema simulado no lineal teniendo en cuenta la respuesta en estado estable de la variable de salida, ante valores constantes y diferentes de la variable de entrada. En segundo lugar, se recurrió a un motor de corriente continua, tomando como variable de entrada, el voltaje aplicado en armadura y como variable de salida, la velocidad angular del eje del motor.
En ambos casos, se aplicaron unos pasos sistemáticos bien definidos que pueden ser aplicados a cualquier tipo de sistema univariado con una relación algebraica explícita entre las variables de entrada y salida y con respuesta paso aproximada de primer orden. El modelo construido permitió estudiar el comportamiento del proceso simulado en todo el rango de operación para el cual se hubo analizado la variable de entrada.
III. METODOLOGÍA
A. Análisis teórico
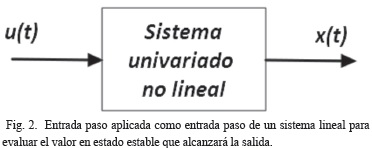
Un sistema dinámico no lineal con respuesta aproximada de primer orden, puede expresarse de la forma general:

La variable de entrada u y la variable de salida x, dependen del tiempo t. En tanto que un sistema lineal univariado e invariante en el tiempo de primer orden, puede ser expresado como:

La ecuación (2) es un caso particular de la ecuación (1) y corresponde a una relación lineal entre las variables. La teoría clásica de control utiliza las series de Taylor como herramienta para linealizar un sistema que no lo es, alrededor de un punto de operación (Xss,Uss). El modelo lineal aproximado sólo es válido para un reducido intervalo y está dado por:
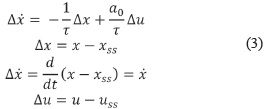
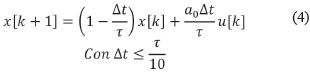
En tiempo discreto, las ecuaciones (3) son la base para realizar simulaciones mediante cualquier método de discretización. Por ejemplo, por el método de Euler, la ecuación en diferencias equivalente:
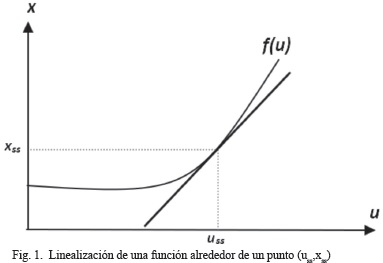
En estado estable, cuando la variable de entrada mantiene un valor constante Uss, la variable de salida X toma un valor finito y constante Xss. Un sistema no lineal univariado pero estable, también mantendrá la variable de salida en valores estables si la entrada también se mantiene. Con estas condiciones, la ecuación (1) conduce a:

Como muestra la figura 1, la gráfica se construye a partir de los valores obtenidos en estado estable. Una aproximación lineal se obtiene seleccionando un punto por el que se hace pasar una recta tangente a dicho punto. La ecuación de la recta tangente está dada por:

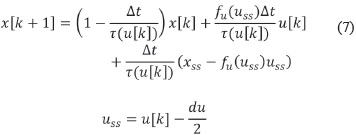
Si se toma la expresión (6) como una referencia en cada punto posible de la función f(u), su validez sería tomada en segmentos u_ss-du<u<u_ss+du, la ecuación en diferencias que tendría un comportamiento en estado estable tal como lo tiene la función de la fig. 1, es:
Para determinar la constante de tiempo τ, es necesario realizar pruebas con señales de entrada paso en diferentes puntos de operación. Los sistemas no lineales univariados tienen diferentes constantes de tiempo en función de la relación entre las variables de salida y las de entrada. Con la función f(u) conocida, es necesario conocer la dependencia de la constante de tiempo τ de la variable de entrada u.
B. Determinación de la constante de tiempo
El rango de operación de la variable de entrada está dado por las condiciones del sistema. Considerando que dicho rango puede expresarse en forma general como:Umin<U<Umax, y tomando el mínimo incremento de u como, , siendo n las particiones tomadas en el rango de operación.
, siendo n las particiones tomadas en el rango de operación.
Se seleccionan m valores de referencia para la variable de entrada comprendidos dentro del rango de operación y distribuidos equitativamente:

Se aplican señales paso con valores iniciales y finales alrededor de cada uno de los valores uss:
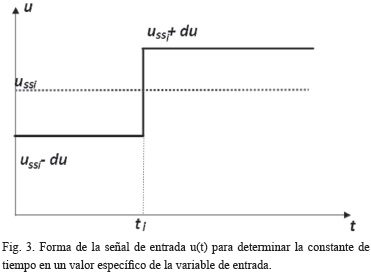
Se aplica la entrada comenzando en el valor ussi-du y manteniendo la amplitud durante un tiempo ti hasta que se alcance un valor de salida en estado estable. A continuación se aplica cambio abrupto a la variable de entrada equivalente a un flanco de subida, hasta una nueva amplitud ussi+du.
En la fig. 4, ilustra la forma en que se calcula el valor de τ para cada valor de ussi:
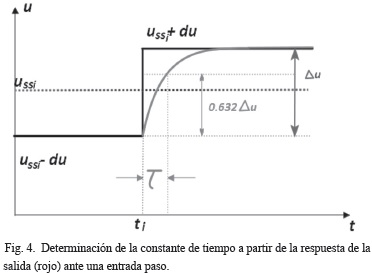
Con los valores de la constante de tiempo determinados en cada valor de la variable de entrada ussi, se aplica regresión por mínimos cuadrados para encontrar la expresión matemática que relaciona τ con u:

En resumen, el procedimiento de formulación de un modelo discreto construido a partir de la segmentación de la relación en estado estable entre las variables de entrada y salida se ejecuta en los siguientes pasos:
1) Determinación de la relación matemática entre las variables
Encontrar una función explícita que relaciona la variable de salida unívocamente con cada valor de la variable de entrada.
2) Determinación de la relación de la constante de tiempo con la variable de entrada.
Mediante la aplicación de funciones paso entre dos valores alrededor de puntos representativos en el rango de operación de la variable de entrada.
3) Formulación de la ecuación en diferencias equivalente
con los parámetros: periodo de muestreo, constante de tiempo variable, derivada de la función x(u), se completa la descripción en tiempo discreto del modelo equivalente.
4) Validación del modelo
Comparación entre la respuesta paso del sistema no lineal y la respuesta paso del modelo discreto equivalente.
El procedimiento se realizó en dos etapas. En primer lugar se tomó un sistema no lineal a partir de la simulación de su comportamiento dinámico. Dicho sistema estuvo dado por una ecuación diferencial no lineal. Se aplicó el procedimiento sin tener en cuenta la dinámica interna, sino la relación entre variables de entrada y salida. La segunda etapa, recurrió a un motor de corriente continua que hace parte de un módulo académico.
IV. RESULTADOS
A. Primera Etapa
La primera etapa consistió en simular un sistema dinámico descrito por una ecuación diferencial no lineal de primer orden. El sistema en cuestión fue:

El rango de operación se definió como: 0<u<1. La tabla I. muestra los valores obtenidos en estado estable a partir de los cuales, se aplicó regresión polinómica de grado 2.
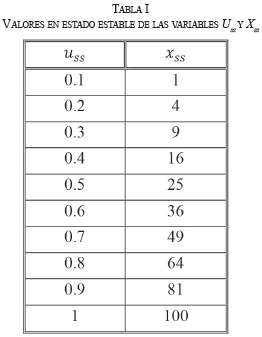
La ecuación que relacionó las variables en condiciones de estado estable, fue:

Evaluando la constante de tiempo a través de la respuesta paso con los valores de u=[0.25 0.5 0.75] y du=0.1 con el procedimiento sintetizado en la figura 4, la ecuación que relacionó la constante de tiempo en función de la variable de entrada , estuvo dada por:

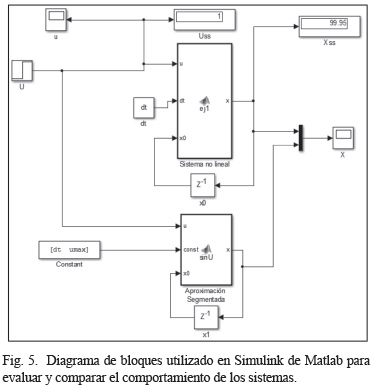
Utilizando la herramienta Simulink© de Matlab® se simuló el comportamiento tanto del sistema no lineal dado por la ecuación (10) y el sistema basado en la aproximación lineal segmentada. El bloque "Aproximación Segmentada" implementó el código a partir de ecuación en diferencias (7) con los datos particulares del sistema. Se tomó un valor de n=100, para definir el incremento du, necesario para aplicar el algoritmo iterativo.
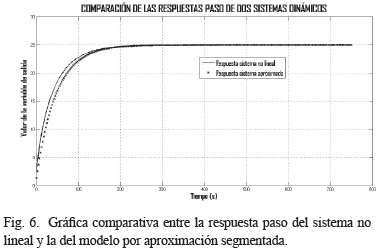
La gráfica expuesta en la figura 6, es una muestra de las varias que se obtuvieron para entradas paso. El caso particular ilustrado, corresponde a la respuesta tanto del sistema original no lineal como del sistema aproximado lineal por segmentos ante una entrada paso de 0.5 unidades de amplitud. Ante otras entradas paso de magnitud diferente, se obtuvieron resultados similares.
B. Segunda Etapa
En un sistema univariado real del que se desconoce de forma inmediata el conjunto de parámetros, pero se tiene acceso a manipular la variable de entrada u y es medible la variable de salida x, es donde se puede verificar la validez del procedimiento descrito en este documento. Se utilizó como sistema con respuesta de primer orden, la velocidad de giro del eje ω de un motor de corriente continua en función del voltaje aplicado en armadura. La configuración de la conexión fue con excitación independiente. La máquina para el experimento fue un módulo De Lorenzo (fig. 7).
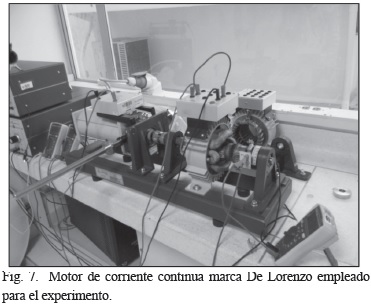
En teoría un motor de corriente continua es un sistema lineal de segundo orden sobre amortiguado. La máquina utilizada, se trabajó en un rango de 4.05V<Va<40.16V para la variable de entrada: voltaje aplicado en armadura. La corriente de campo se fijó en If=0.85mA.
El comportamiento de la variable ω respecto a la variable de entrada V_a, en condiciones de estado estable, se aprecia en la figura 8.
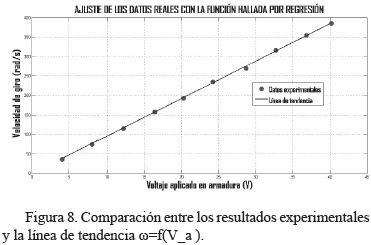
La relación en estado estable, muestra una función lineal dada por:

La dependencia de la constante de tiempo τ con Va, está dada por:

Se definió un valor de n=36 y un dV_a=0.1 y un periodo de muestreo de Δt=0.004. La ecuación en diferencias (7) adaptada al caso particular de esta segunda etapa, conduce a:
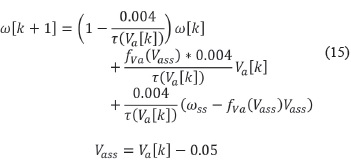
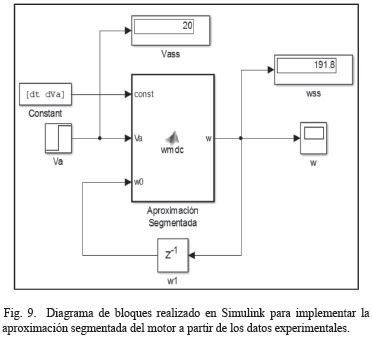
Las ecuaciones (13)-(15) fueron la base para construir la simulación de un sistema discreto capaz de modelar el comportamiento dinámico del motor. En la fig. 9 está el diagrama de bloques hecho en Simulink.
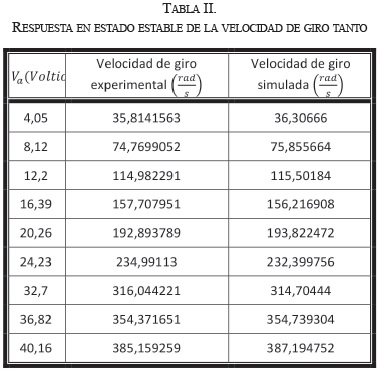
Con el modelo discreto se procedió a simular la respuesta de la velocidad al aplicar voltajes en armadura iguales a los utilizados experimentalmente. La tabla II, permite comparar los valores en estado estable entre los datos experimentales y los datos obtenidos por simulación del modelo discreto.
Finalmente se verificó la respuesta paso del sistema real comparada con la respuesta del modelo simulado por aproximación segmentada. En el sistema real, se aplicaron voltajes paso de 10,15,20,25 y 30V de magnitud.
Cada paso se implementó en la práctica, ajustando la fuente de voltaje a los valores ya indicados, sin estar conectada a las terminales de armadura. Un interruptor de estado sólido en serie con el circuito de armadura del motor, permitió pasar de 0 al valor fijado previamente con un pulso generado desde un sistema programable. El pulso de encendido, también funcionó como señal para sincronizar la adquisición de datos representativos de la velocidad de giro en cada instante de muestreo. La frecuencia de muestreo del sistema de adquisición de datos fue de 250Hz.
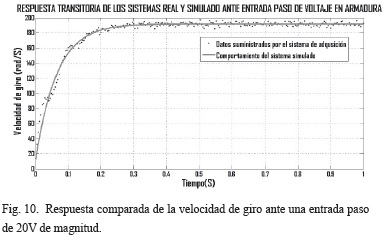
En la fig. 10 se observa el comportamiento transitorio de los sistemas real y simulado cuando la entrada fue un voltaje paso de 20V de magnitud. Se muestra este caso particular de entre los registrados por tratarse del valor entero de la variable manipulada en el punto medio aproximadamente del rango de operación.
V. DISCUSIÓN DE RESULTADOS
En la primera etapa se pudo apreciar que el comportamiento transitorio del sistema lineal segmentado aproximado se aleja del comportamiento transitorio del sistema no lineal original con un error máximo de -6.25% (Ver fig. 6). Sin embargo, los valores en estado estable de ambos sistemas son coincidentes.
En la segunda etapa la línea de tendencia generada por regresión lineal y los datos experimentales de la velocidad de giro del motor en relación con el voltaje aplicado en armadura, tuvieron una correlación de R=0.9997 (Ver fig. 8 y tabla II).
La respuesta paso de la velocidad de giro del motor real obtenida mediante un sistema de adquisición de datos mostró una tendencia acorde alrededor de la curva generada por el sistema simulado (Ver fig. 10). Se presentó una dispersión de los datos alrededor del valor de estado estable con una desviación estándar de σ=2.3393. El promedio de los datos registrados por el sistema de adquisición de datos, en estado estable para la prueba particular mostrada en la figura 10, fue de 191.5515 rad/S. El error relativo entre el valor en estado estable del sistema simulado respecto al valor promedio real fue de 0.6% aproximadamente.
Para las pruebas de verificación del modelo aproximado con entradas paso con las otras magnitudes (10,15,25 y 30V) la máxima desviación estándar entre los datos reales en estado estable y su promedio fue de σ=3.3271. El error relativo máximo del valor de velocidad dado por el modelo simulado respecto al promedio en estado estable de los datos simulados fue de 1.023%.
Los resultados obtenidos en ambas etapas, constituyen una herramienta para continuar con la búsqueda de modelos discretos para sistemas no lineales multivariados.
VI. CONCLUSIONES
El método de obtención de un modelo discreto a partir de la linealización segmentada, demostró ser una buena aproximación para describir el comportamiento dinámico de sistemas univariados no lineales. Es necesario que el sistema en cuestión permita diferenciar la variable de entrada y la variable de salida. De igual forma, debe permitir manipular y medir dichas variables.
En el caso de la segunda etapa del proceso, el motor de corriente continua admite un comportamiento lineal. Es posible entonces, obtener un modelo lineal a partir de un procedimiento normalizado para deducir los parámetros clásicos: resistencia e inductancia de armadura, constante de fuerza electromotriz, constante de torque electromagnético, momento de inercia intrínseco y factor de amortiguamiento. Sin embargo, el procedimiento seguido, igualmente suministró un modelo descriptivo discreto con resultados que demostraron estar bien ajustados al comportamiento dinámico real.
Un sistema dinámico univariado con respuesta transitoria de primer orden, no lineal, puede ser modelado en tiempo discreto por una ecuación en diferencias (Ecuación 7) donde los coeficientes de dicha ecuación se conforman a partir de la constante de tiempo, la derivada puntual de la variable de salida respecto a la de entrada y por el periodo de muestreo. Las dos primeras son funciones explícitas de la variable de entrada y en sistemas no lineales son distintas de cero. El método expuesto, también puede ser aplicado a sistemas lineales, en cuyo caso las funciones f_u (u) y τ(u) son valores constantes.
Los resultados obtenidos permiten validar la aproximación como herramienta pedagógica en la enseñanza de los sistemas de control. Particularmente, el modelamiento de un sistema univariado a partir de los conocimientos básicos de la teoría de control y de las temáticas que le soportan, así como la simulación mediante modelos discretos, constituyen una aplicación accesible a los estudiantes de ingeniería.
REFERENCIAS
[1] P. A. Fishwick, Handbook of Dynamic System Modeling. CRC Press, 2007. [ Links ]
[2] J. A. Sokolowski and C. M. Banks, Principles of Modeling and Simulation: A Multidisciplinary Approach. John Wiley & Sons, 2011. [ Links ]
[3] O. O. Rodríguez-Díaz, E. L. Téllez-Valderrama, and D. A. Gutiérrez-Ramírez, "Simulación del Péndulo Invertido Rotacional usando Easy Java Simulations y Matlab," Tecno Lóg., no. 28, pp. 15-32, Jun. 2012. [ Links ]
[4] G. F. Martínez Alonso, J. Á. Garza Garza, E. Báez Villarreal, and A. Treviño Cubero, "Implementación y evaluación del Currículo Basado en Competencias para la formación de ingenieros," REDU Rev. Docencia Univ., vol. 11, no. extra., pp. 141-174, Jan. 2013. [ Links ]
[5] C. Alvarez Alvarez, "La relación teoría-práctica en los procesos de enseñanza-aprendizaje," 2012. [Online]. Available: https://digitum.um.es/jspui/handle/10201/38854. [Accessed: 24-Jul-2015] [ Links ].
[6] O. O. Rodríguez, R. F. P. Pinto, and P. F. Cárdenas, "HERRAMIENTAS EJS 3D/ MATLAB PARA EL CONTROL DEL SISTEMA NO LINEALAPLICADO AL PÉNDULO INVERTIDO SOBRE CARRO DESLIZANTE," Rev. Colomb. Tecnol. Av. RCTA, vol. 1, no. 19, Jul. 2013. [ Links ]
[7] G. P. J. Placer, E. G. Modai, A. O. Vitali, and F. Ferreira, "MONITOREO REMOTO DE UN PROCESO REPRESENTADO EN LABORATORIO, PARA SIMULAR APLICACIONES REALES DE TELESUPERVISIÓN EN SISTEMAS SCADA," Proc. Int. Conf. Eng. Technol. Educ., vol. 11, no. 0, Jan. 2014. [ Links ]
[8] B. G. Amoroso Ochoa, "Diseño y Construcción de un Equipo de Laboratorio de Control Automático para Simulación de Variables de Proceso de Presión, Temperatura y Nivel Mediante la Utilización del Software SCADA P-CIM., " Thesis, 2012. [ Links ]
[9] P. C. Gallardo, "La Matemática en el Contexto de las Ciencias y la modelación," Cuad. Investig. Form. En Educ. Matemática, vol. 0, no. 10, Jun. 2013. [ Links ]
[10] Y. de la C. M. Díaz, M. de L. B. Estévez, and C. C. Iglesias, "La enseñanza de la Matemática en Ingeniería Mecánica para el desarrollo de habilidades., " Pedagog. Univ., vol. 18, no. 4, Feb. 2014. [ Links ]
[11] J. A. Rossiter, Model-Based Predictive Control: A Practical Approach. CRC Press, 2013. [ Links ]
[12] S. Sastry, Nonlinear Systems: Analysis, Stability, and Control. Springer Science & Business Media, 2013. [ Links ]
[13] D. Cheng, X. Hu, and T. Shen, Analysis and Design of Nonlinear Control Systems. Springer Science & Business Media, 2011. [ Links ]
[14] J. A. K. Suykens and J. P. L. Vandewalle, Nonlinear Modeling: Advanced Black-Box Techniques. Springer Science & Business Media, 2012. [ Links ]
[15] K. Ogata, Modern Control Engineering. Prentice Hall, 2010. [ Links ]
Oscar Bellon Hernández (M'2012) Nació en la ciudad de Tunja (Colombia) el 17 de mayo de 1972. Se graduó como ingeniero electrónico en la Universidad de Ibagué en el año 2002. Gracias al convenio entre la misma institución y las universidades belgas U-Gent y KLeuven, obtuvo su título de Magister en Ingeniería de Control Industrial en el año 2011. Actualmente adelanta estudios en la Universidad Tecnológica y Pedagógica de Colombia en el Doctorado en Ingeniería Ciencia de los Materiales.
Su carrera como docente de ingeniería comenzó en el año 2003 al ingresar como catedrático en la Universidad de Ibagué, donde estuvo vinculado hasta el 2011. Durante ese mismo tiempo, también trabajó como instructor en varios institutos de educación no formal en las áreas de electrónica y mantenimiento de computadores. Del 2012 al 2014, se desempeñó como docente de tiempo completo del programa de Ingeniería Mecatrónica de la Universidad de Boyacá en Tunja. Actualmente es docente de la escuela de Ingeniería Electrónica de la UPTC en Tunja.
Álvaro Torres Amaya nació el 8 de abril de 1983 en Tunja (Colombia). En el 2007 obtuvo su título de ingeniero electrónico en la UPTC sede Sogamoso. Es especialista en Servicios Telemáticos e Interconexión de Redes de la universidad Manuela Beltrán en 2012. Es Magister en Ingeniería Electrónica de la Escuela Colombiana de Ingeniería Julio Garavito (2015).
En los años 2008 y 2009 se desempeñó como ingeniero de soporte en la empresa TELECOM. Desde el 2009 está vinculado como docente de tiempo completo en la Universidad Pedagógica y Tecnológica de Colombia.

