











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
PermalinkI. INTRODUCCIÓN
La automatización y los sistemas de control ocupan un lugar destacado en el desarrollo tecnológico de cada país, y su protagonismo se ha ido consolidando en el campo de la educación; actualmente, las disciplinas tienen sentido por las prácticas interdisciplinarias, las cuales convocan diversas perspectivas disciplinarias con la finalidad de construir representaciones adecuadas del mundo, como menciona Fourez[1]; el ser humano no da solución a los problemas que se le presentan en la vida cotidiana con una visión fragmentada del conocimiento, y no sigue necesariamente las líneas de una sola disciplina. Este planteamiento teórico-práctico hace de la Mecatrónica un área del conocimiento emergente.
La propuesta que aquí se plantea, adapta y apropia las nuevas tecnologías para suplir y dar respuesta a una necesidad indiscutible en el proceso de enseñanza-aprendizaje del material didáctico. La necesidad de los materiales didácticos viene dada por su carácter instrumental para comunicar experiencias. El aprendizaje humano es una condición fundamentalmente perceptiva y por ello, cuantas más sensaciones reciba el sujeto, más valiosas y exactas serán sus percepciones. Mientras que las palabras del maestro solo proporcionan sensaciones auditivas, el material didáctico ofrece al alumno un verdadero cúmulo de sensaciones, auditivas, visuales y táctiles que facilitan el aprendizaje, Cerezo[2].
Vale la pena mencionar que los laboratorios equipados para el área de automatización y control necesitan de una gran inversión; esto ha llevado a que tradicionalmente se estudien y analicen de manera teórica, conceptos en relación con dichas áreas y a que en algunos casos se realicen diversas prácticas en laboratorios para la comprensión de los conocimientos teóricos. En este sentido, la Corporación Tecnológica Industrial Colombiana, desde donde se plantea el proyecto, no limita su quehacer a esta situación, por el contrario, a través de los entornos académicos (docente-estudiante) se diseñan y construyen recursos pensados de forma específica para facilitar la enseñanza de un tópico, la realización de prácticas de laboratorio y para responder a unos criterios de utilidad determinada.
Como resultado de este proyecto, se espera el diseño y la construcción de un Módulo programable de posicionamiento electroneumático para la adquisición de conocimientos en una concepción interdisciplinaria, ver Fig. 1, debido a que integra temas relacionados con el área de estudio, tales como: Neumática, Electroneumática, Automatización con ordenadores personales (PC), Controladores Lógicos Programables (PLC), técnicas de manipulación automatizadas y procesos industriales. La modalidad propedéutica de formación profesional que ofrece la institución, permite la implementación de este material en los tres niveles (técnico, tecnólogo y profesional), para los que se proyecta la elaboración de guías de trabajo teórico-prácticas que faciliten el proceso académico, adquiriendo las herramientas necesarias para formar profesionales y trabajadores calificados, capaces de responder a las necesidades de la economía mundial, Naya e Imada[3].
II. DESARROLLO DE LA PROPUESTA
A. Análisis de requerimientos
Inicialmente, en el proceso de diseño y exploración de ideas para el desarrollo de la propuesta física, se presentan algunas de las condiciones que fueron decantadas en cuanto a los análisis y exigencias de los contenidos académicos de las asignaturas, sobre las cuales se pretende implementar el módulo.
La tecnología usada para el sistema de control debe ser flexible a la aplicación de conceptos de programación (en cualquier plataforma y lenguaje); esto como el aspecto más relevante del módulo: su sistema de conexión y su intención de funcionar como interfaz de salida, debe permitir la aplicación y articulación de temáticas en asignaturas como: Introducción a la Mecatrónica, Algoritmos y diagramación, Programación de micro controladores y PLC´s, entre otras, integradas a los niveles de formación técnico, tecnológico o profesional, en las que la implementación de sistemas de conexión, comunicación y, si es necesario, de tratamiento de señales de tensión, anteceden las posibilidades de diseño del sistema, limitado exclusivamente por el manejo de herramientas y alcances de la asignatura.
Se propone la integración de mínimo dos tecnologías con las cuales se realice el desplazamiento sobre cada uno de los ejes (X, Y y Z). En primer lugar, se propone la neumática, un tema común de asignaturas como: neumática básica, mandos electro-neumáticos y mandos electro-oleo neumáticos; se consideran también características como el manejo de altas velocidades, porque es una tecnología limpia, no exige elevados costos de mantenimiento y presenta poco nivel de accidentalidad, debido a que su sistema de impulsión está basado en la utilización de aire comprimido. En segundo lugar, se propone la implementación de servomecanismos, los cuales pueden ser acoplados al movimiento rotatorio del motor, dicha tecnología asistida por dispositivos de control basados en la operación de señales eléctricas, como sensores, relés, pulsadores, bobinas y el sistema de programación, mencionados en el punto 1. Articula temáticas de asignaturas como: Introducción a la Mecatrónica, control eléctrico, control, controles automáticos, entre otras.
Con relación a la implementación de las tecnologías mencionadas en los puntos 1 y 2, se requiere que el módulo tenga características particulares de manipulación en cuanto a sus dimensiones, peso, facilidad de mantenimiento y mínima cantidad de piezas móviles, con el fin de facilitar la realización de las prácticas y el desplazamiento del módulo a diferentes lugares; lo anterior, requiere de un diseño y modelamiento mecánico que responda a estas necesidades y que, objetivamente, dé cuenta de los recursos físicos y presupuestales del proyecto.
Cabe resaltar que las condiciones previamente descritas, se relacionan con intereses particulares del sector productivo, con enfoque en el nivel técnico profesional, en el cual se resaltan las competencias orientadas hacia el saber hacer.
B. Marco de referencia de materiales y tecnologías actuales para la construcción
La indagación y construcción del marco referencial de materiales y tecnologías determina condiciones físicas del módulo, en cuanto a dimensiones de la estructura, sistemas mecánicos de movimiento y sistemas de control; es importante resaltar que para la construcción del módulo se gestiona la donación de materiales y elementos (válvulas, cilindros y elementos estructurales), del área de recursos didácticos del programa específico de Ingeniera Mecatrónica. Esto en primer lugar, con el fin de dar uso constante a dichos elementos, ya que una vez integrados al módulo se concibe su activación en cuanto a la realización de prácticas; en segundo lugar, completar el control de todos los ejes de movimiento proyectados en el diseño, minimizando gastos en el presupuesto.
Con la idea de un modelamiento básico del sistema que se pretende construir, se realiza un listado de elementos con su respectiva descripción, para dar cumplimiento a los requisitos físicos disponibles que permitan el diseño y construcción del módulo, la posibilidad de movilidad del sistema en sus tres ejes coordenados X, Y y Z, con los cuales puedan generar el desplazamiento de una pieza de un punto inicial a un punto final determinado (principio básico de funcionalidad); tal sistema supone un grado de flexibilidad en cuanto a los diferentes niveles de programación y realización de prácticas, por lo tanto, es indispensable garantizar el funcionamiento de los sistemas mecánicos que posibiliten la movilidad en cada uno de sus ejes, ver Fig. 2.
Se da cuenta entonces de la disposición de los elementos en términos de ver la utilización de espacios y soportes en los cuales van a estar alojados. Se identifican dos categorías para la selección de estos elementos: elementos primarios[4], los cuales muestran los sistemas de movilidad propios del posicionamiento del módulo, y elementos secundarios([5], en los cuales están los elementos de adaptación y conexión (tanto de la red neumática, como de las señales eléctricas) del sistema ya integrado.
Se debe de aclarar que los elementos de programación (unidad central de procesamiento de la información) PLC´s, Microcontroladores, Plataforma Arduino, Plataforma Rapsberry, entre otros, son integrados por el estudiante o por lineamientos del docente de la asignatura para la que se realiza la práctica, por ende, se prevén espacios de trabajo y disposición del módulo para la ubicación de dichos elementos. Se proyecta también la operatividad y versatilidad del módulo en relación a diseños y sistemas de conexión de acción manual, en el orden de aplicación de tecnologías neumática y electro-neumática, las cuales permiten la integración de componentes (tarjetas de relés, de pulsadores, temporizadores, contadores y elementos propios del control electro-neumático) que pueden ser usados en el módulo con conexión directa a los elementos de control del sistema electro-neumático (sensores y electroválvulas).
En cuanto a la implementación de las válvulas, se cuenta con la integración de un sistema de absorción realizado por un vacuostato (válvula de vacío), que permite realizar la sujeción de la pieza una vez se haya posicionado el sistema de ejes y la ventosa (elemento que realiza la acción específica de sujeción) del cilindro neumático vertical de doble efecto, para que en su acción de avance quede en contacto con la pieza a desplazar. Asimismo, se contempla el uso de manguera neumática flexible para la conexión de elementos neumáticos, al igual que el uso de conductos eléctricos (cables), con terminales estándar de conexión (tipo banana) a los elementos de control electroneumático (tarjetas de relés, pulsadores…), usados en los diseños de control a implementar.
C. Análisis del sistema ergonómico. relación entre el sujeto, objeto, actividad, entorno y contexto
El análisis ergonómico realizado tiene como objetivo determinar las dimensiones “ideales” del módulo, con el fin de brindar plena comodidad al usuario en el desarrollo de sus prácticas, definidas como la actividad, producto de una interacción entre el sujeto y el objeto.
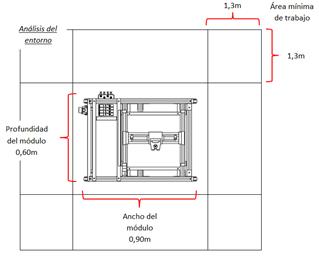
Dicho análisis determina que las variables de longitud, profundidad y ancho del módulo, medidas referenciadas sobre los ejes X y Y correspondientemente, ver Fig. 3, no son de gran trascendencia para la relación sujeto-objeto, pero sí lo son en cuanto a la relación entre el objeto-sujeto y el entorno, ya que en este plano (superior) se analiza que la actividad (práctica de laboratorio) es desarrollada en contorno del módulo, razón por la cual exige un espacio determinado (mínimo) para la comodidad del (los) sujeto (s) y la relación con elementos exteriores al módulo. Se recomienda que la distancia (área de trabajo alrededor del módulo) que debe haber sea de 1,3m, y la cantidad máxima de sujetos que interactúen con el módulo (al mismo tiempo) sea de 4.
Se considera entonces que las variables de longitud, profundidad y ancho del módulo también están relacionadas con la dimensión de los elementos que integran el sistema posicionado. Este análisis toma lugar en el proceso de ingeniería de detalle, y se justifica con la realización de una creación digital del objeto (diseño 3D), que proyecta la visualización del módulo y tiene en cuenta las características físicas de los objetos que lo integran. Por consiguiente, la longitud de ancho y profundidad definidas son de 0,90m por 0,60m, correspondientemente. Se muestra a continuación la disposición de la vista superior del módulo, en la que se detallan las longitudes previamente determinadas.
La determinación de la altura del módulo se realiza en relación con el percentil de la altura del codo del sujeto, referenciada por los métodos y estándares para el diseño ergonómico de actividades laborales, Niebel y Freivalds[6]. El análisis de esta variable de longitud se especifica según criterios de uso (características propias del sujeto que deben ser tenidas en cuenta para el diseño) y funcionalidad del módulo. La altura óptima de la superficie de trabajo depende de su naturaleza (de precisión, ligero o pesado, ver Fig. 4; considerando que las realizaciones de las actividades sobre el módulo corresponden a trabajo ligero, se determina que la superficie de trabajo debe ser de 0 a 10cm, por abajo del codo, para materiales y herramientas pequeñas 7.
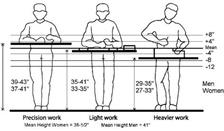
Fig. 4 Tipos de trabajo y longitudes a tener en cuenta para actividades laborales en posición de erguido funcional.
A partir de lo anterior se determina entonces que la variable de longitud, altura del módulo, medida referenciada sobre el eje Z, debe ser entre los 0,75m y 0,85m en relación con las variables de género del sujeto (masculino o femenino) ver Fig. 5, tipo de trabajo a desarrollar en la actividad (ligero), y percentil para tener en cuenta (altura a codo); a continuación, se muestra el detalle de la vista frontal del módulo, en donde se especifica dicho análisis.
D. Diseño y simulación digital de la estructura física del módulo - ingeniería de detalle de la creación. diseño 3d.
En la Tabla I se evidencia el diseño 3D de la propuesta, en donde se visualiza la disposición general de los elementos a implementar y la apariencia final del módulo, una vez materializada la propuesta. Esta herramienta de ingeniería también se emplea para la descripción detallada, en cuanto a la construcción de partes y ensamble de los elementos[8], planificando el uso de los recursos del proyecto de forma tal que se avance con certeza en el proceso de diseño y en la construcción del módulo.
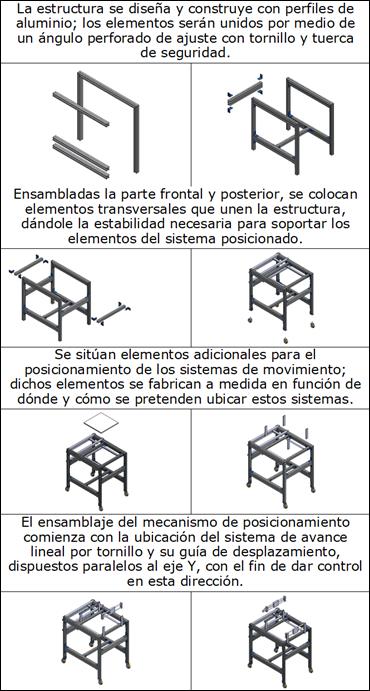
E. Construcción del módulo de posicionamiento electroneumático
Una vez discriminadas cada una de las actividades de diseño, se procede a construir el módulo, dando orientaciones en cuanto a la consecución específica de cada uno de los pasos previstos. En la Tabla II se muestran algunas imágenes en las cuales se percibe la realización de estas actividades, llevada a cabo en un tiempo estimado de cuatro (4) semanas.
III. VALIDACIÓN
Con la certeza de funcionamiento del módulo electroneumático, se comienza a planear la ejecución de la prueba piloto; para ello se plantea una práctica sobre la aplicabilidad del módulo en entornos académicos concretos, aterrizados al desarrollo de temáticas propias de una asignatura en particular, que promueva el desarrollo de habilidades prácticas.
Al realizar un análisis cuidadoso de la estructuración de la malla curricular, se considera pertinente ver la aplicabilidad del módulo en la asignatura de: Mandos electroneumáticos, tercer semestre del programa Técnico profesional en mantenimiento de sistemas Mecatrónicos, en relación con las temáticas allí planteadas. Se diseña una guía de trabajo en la cual se especifica el desarrollo de una práctica puntual, referenciada al diseño y montaje de circuitos electroneumáticos, temática propuesta en la unidad 14. Introducción a la técnica de circuitos electroneumáticos secuenciales del micro currículo de la asignatura[9]; esto con el fin de realizar una secuencia de movimientos sobre el módulo, que dé cuenta del entendimiento y la aplicación de métodos de solución como el propuesto para el desarrollo de la práctica.
A. Caracterización de la población objeto de estudio
Como se mencionó anteriormente, el grupo de tercer semestre de la jornada diurna, seleccionado para realizar la prueba piloto, está integrado por 19 estudiantes (16 hombres y 3 mujeres), entre los 17 y 24 años de edad; el 90% de ellos vive con su núcleo familiar, en estrato socioeconómico entre 1 y 3; el 90% nació en Bogotá D.C.; el 10% restante proviene de diferentes ciudades del país, con lugar de residencia actual en la capital; el 40% de la población labora actualmente, pero solo el 15% está relacionado con el sector empresarial específico al campo de estudio de la Mecatrónica; el 60% restante se encuentra enfocado en la ubicación de su práctica empresarial y en su formación actual.
B. Diseño de la guía de trabajo y herramienta para la recolección de la información
En la Tabla IV, se indica el diseño de la guía de trabajo comprende tres aspectos fundamentales para la recolección de los datos de la muestra: el primero es la recepción de la información personal que aporta a la caracterización de la población; el segundo es la descripción técnica del ejercicio, y el tercero es indagación en cuanto a la experiencia de interacción con el módulo.
Las preguntas tienen como objetivo indagar acerca del grado de incidencia del módulo y qué tan óptima es su aplicación; debido a esto se cualifican las preguntas de 1 a 5 y se analizan tres categorías [10]: particularmente, en primer lugar, la conveniencia del diseño funcional de la creación, en interacción con elementos estándar de uso común para el desarrollo de las prácticas; en segundo lugar, la operatividad directa del estudiante con el módulo, y en tercer lugar, la objetividad del módulo para la comprensión, retención y uso del conocimiento, como herramienta didáctica. Se realizará un análisis porcentual de los datos obtenidos, en relación con las 10 preguntas centralizadas en las categorías de interés.
C. Análisis de los resultados
Aspecto 1.
En relación con los datos obtenidos, se puede evidenciar que la mayoría de estudiantes observa facilidades en el módulo en cuanto a la interacción con otros elementos; no obstante, se puede dar cuenta de que, en montajes de circuitos más complejos, el espacio se ve reducido para el almacenamiento de estos elementos; también se identificó que la disposición de los cables de conexión es muy extensa y de poca utilidad, ya que los elementos de conexión se encuentran muy cerca.
Aspecto 2.
Se encuentra una gran diferencia de conceptos entre la disposición de los grupos formados, ya que los integrados por cuatro, y algunos por tres estudiantes, manifestaron incomodidad dada la interacción con el módulo, pues todos debían estar atentos al realizar las conexiones y la cercanía entre estudiantes no facilitaba la acción. Con valoraciones asertivas, se determina que las dimisiones del módulo son favorables al igual que la disposición de los elementos que lo componen, pero se evidencian comentarios orientados a cambios de posición de sensores en función del grado de complejidad del ejercicio a realizar.
Aspecto 3.
Reafirmando lo mencionado en el aspecto anterior, la cantidad de estudiantes por grupo resulta ser una limitante del módulo, ya que la capacidad en cuanto a sus dimensiones no es objetiva para el manejo de no más de tres estudiantes. La poca interacción con los elementos no permite que todos los estudiantes del grupo posean la misma información del montaje y, por lo tanto, el mismo grado de entendimiento de la temática en estudio. Por otro lado, los grupos integrados por dos y hasta tres estudiantes que interactuaron con el módulo, no vieron mayor dificultad para realizar la identificación y conexión de elementos, por el contrario, manifestaron una grata experiencia con ánimo de mejorar las técnicas de control a implementar en el módulo.
D. Aspectos generales de análisis
La discriminación de la muestra en cuanto a la conformación de grupos evidencia que el tiempo de desarrollo del montaje es menor en relación con la cantidad de estudiantes, los grupos integrados por dos e inclusive un estudiante, se concentran más en las actividades de identificación y de conexión de elementos.
Se observa también que los elementos a usar en la realización del montaje, deben apoyarse en una mesa adicional, ya que el módulo no cuenta con un área para la organización de los elementos y herramientas que se necesitan para su manipulación. Para el caso particular en el que se implementa la unidad central de procesamiento de la información (PLC, Arduino, rapsberry, ente otros), se debe tener en cuenta que el módulo debe posicionarse cerca aun PC, por medio del cual se realiza la programación; ello indica que el sistema de desplazamiento del módulo es necesario para la ubicación y manipulación en interacción con otros elementos del laboratorio.
El diseño de los circuitos electroneumáticos contempla exclusivamente el uso de válvulas monoestables [11] para el control de movimiento de los cilindros, una característica particular en el diseño de sistemas de control para tener en cuenta, ya que, en este caso, el diseño del circuito se basa en el principio de la retención de señales debido a la utilización de válvulas particulares con solo una bobina para su activación.
La conexión de elementos de forma directa con el módulo, se hace objetiva en cuanto a la identificación de señales directas que actúan sobre el sistema (sensores), acción particular que permite entender mejor la secuencia que se pretende implementar en el módulo.
IV. CONCLUSIONES
La materialización de una idea como producto final objetiva la reflexión crítica de las características de contexto para el cual está siendo creada o diseñada. Para el caso específico de la creación del módulo electro-neumático, se tuvieron en cuenta aspectos de orden pedagógico, en los que se realiza un análisis de enseñabilidad, educabilidad y educatividad[12], en función del proceso de formación del sujeto de estudio; aspectos de diseño industrial que son tenidos en cuenta para la elaboración de cualquier objeto o tecnología, en la relación del sistema ergonómico que involucra el objeto, el sujeto y la actividad; finalmente, aspectos del orden técnico específico para el área de conocimiento de la Mecatrónica, y programas afines de la automatización y el control industrial.
Además, la creación de elementos didácticos para el mejoramiento de la calidad de la educación (para cualquier área del conocimiento), es necesaria en la media en que los procesos de aprehensión se facilitan a través de la interacción directa y la experimentación de fenómenos particulares al área de estudio [13]. La problemática en torno a la falta de recursos específicos para los procesos de capacitación en competencias específicas del saber-hacer, como fundamento particular del área de la Mecatrónica, son no solo necesarios, si no obligatorios en la medición de los procesos de calidad de la formación.
De otro lado, la ejecución de procesos de propiedad intelectual para las creaciones debe ser referenciada con conocimiento oportuno y específico de lo que se pretende registrar. Entender los procesos y la metodología para el desarrollo de patentes, es ineludible para desarrollar procesos óptimos de registro en esta modalidad, ya que la revisión por parte de la Superintendencia de Industria y Comercio, SIC, determina características particulares de reivindicación que definen el grado de innovación que se presenta. Tener un acercamiento oportuno a la claridad sobre dichas reivindicaciones, objetiva el correcto uso y búsqueda de la información que debe ser actualizada constantemente, con el fin de mantener la ventaja tecnológica propuesta.
El uso de herramientas de ingeniería para el diseño y construcción de objetos, se manifiesta como un leguaje obligatorio para llevar a cabo procesos de desarrollo tecnológico. La implementación de técnicas particulares de diseño [14] objetiva de una forma clara la certeza de funcionamiento de la creación y permite realizar un análisis puntual de las reivindicaciones mencionadas en el párrafo anterior. Esto particulariza que la presentación de ideas de desarrollo tecnológico requiere de cierto nivel de capacitación y comprensión de lo que se propone. En caso de no contar con dichas particularidades, se recomienda buscar asesoría que permita mostrar y plasmar lo que represente interés para el proponente.
Finalmente, se considera relevante hacer referencia a la gestión de recursos para la realización de procesos investigativos que surgen como identificación de necesidades del contexto. Estas se manifiestan (particularmente) con la medición de la calidad de la institución que busca elevar sus procesos formativos, dentro de un grado de flexibilidad para que los estudiantes apropien las temáticas particulares en su área de estudio. Para esto se considera la posibilidad de retribución de recursos que provengan de los mismos resultados de investigación, como el caso específico de las solicitudes de registro por propiedad intelectual.

