










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkActa Biológica Colombiana
Print version ISSN 0120-548X
Acta biol.Colomb. vol.15 no.3 Bogotá Sept./Dec. 2010
DESARROLLO DE UN LABORATORIO DE MARCHA CON INTEGRACIÓN SINCRÓNICA MEDIANTE UNA ARQUITECTURA EN MÓDULOS
Development of a Gait Laboratory with Synchronic Integration Through a Modular Architecture
FABIO MARTÍNEZ CARRILLO1, M.Sc.; FRANCISCO GÓMEZ JARAMILLO1, Ph. D. (c); EDUARDO ROMERO CASTRO1, Ph. D.
1Universidad Nacional de Colombia. Grupo de Investigación BioIngenium. Bogotá, D.C, Colombia. Correspondencia: Eduardo Romero Castro, Universidad Nacional de Colombia, Facultad de Medicina. Carrera 30 # 45-03, edificio 471 Medicina, piso 1. Bogotá, D.C, Colombia. edromero@unal.edu.co
Presentado 15 de marzo de 2010, aceptado 4 de junio de 2010, correcciones 21 de junio de 2010.
RESUMEN
El Laboratorio de Marcha es un conjunto de herramientas que permiten tomar medidas y realizar un análisis cuantitativo de los patrones de movimiento. Este sistema facilita el diagnóstico, tratamiento, seguimiento e implementación de métodos de rehabilitación en patologías asociadas con el movimiento. En este trabajo se presenta el diseño y desarrollo de un Laboratorio de Marcha que captura y registra diferentes variables dinámicas del movimiento humano. La arquitectura modular del Laboratorio de Marcha permite integrar de forma sincronizada información dinámica y cinemática.
Palabras clave: Laboratorio de Marcha, análisis de movimiento, ingeniería de rehabilitación, instrumentación biomédica.
ABSTRACT
Gait Lab is a set of tools to take measurements and to develop quantitative analysis of movement patterns. This system facilitates the diagnosis, treatment, monitoring and implementation of rehabilitation methods in diseases associated with movement. In this work, we present the design and development of a Gait Laboratory that capture different variables and register human movement dynamics. The modular architecture of the proposed Gait Laboratory allows synchronized integration of kinetics and kinematics information.
Key words: Gait Laboratory, motion analysis, rehabilitation engineering, biomedical instrumentation.
INTRODUCCIÓN
El patrón de marcha de un paciente puede verse alterado en un conjunto grande de patologías, como por ejemplo, en la diabetes, la parálisis cerebral, los accidentes cerebrovasculares, las distrofias neuromusculares y las secuelas producidas por algún tipo de accidente. En algunas de estas patologías las alteraciones de estos patrones resultan fundamentales en el diagnóstico, seguimiento y evaluación del tratamiento (Huiyu y Huosheng, 2004; Gage, 2001).
Un simple análisis observacional de la marcha, en el contexto de un examen físico, casi siempre resulta insuficiente para la identificación de alteraciones del movimiento humano (Hausdorff et al., 2001). Fundamentalmente, en enfermedades complejas con diferentes manifestaciones en los patrones del movimiento, cuyo manejo integral requiere de un análisis objetivo y cuantitativo. La cuantificación del movimiento permite evaluar y comparar la variabilidad de la marcha, infiriendo un grado de la enfermedad para determinar la conveniencia de un procedimiento (Hausdorff et al., 2001). Este tipo de análisis se realiza utilizando Laboratorios de Marcha, un conjunto de herramientas que registran los patrones dinámicos y cinemáticos, la activación muscular y el gasto energético durante el movimiento. (Sheldon, 2004; Baker, 2006). Estos sistemas son frecuentemente usados para cuantificar alteraciones de los patrones de marcha en disciplinas como fisioterapia, reumatología, ortopedia, rehabilitación o para identificar trastornos del aparato locomotor de origen neurológico.
Las variables dinámicas describen fuerzas, momentos y potencias de forma global y para cada articulación que generan o detiene el movimiento, mediante plataformas de fuerza o tapetes de presión (Tik-Pui et al., 2008; Barbier et al., 2003; Lewallen, 1986). Por otra parte, las variables cinemáticas describen la geometría del movimiento registrando el cambio de posición del sistema músculo-esquelético, utilizando para ello sistemas opto-electrónicos, electrogoniómetros o acelerómetros (Wagenaar y Beek, 1992; Gavrila, 1999). Finalmente, la actividad eléctrica de los grupos musculares se obtiene por medio de un electromiógrafo (generalmente con electrodos de superficie), mientas que el gasto energético se estima a partir de la evaluación del consumo de oxígeno o el monitoreo del gasto cardio-respiratorio (Carlo, 1997; Datta et al., 2005).
Cada uno de los patrones de movimiento cuantificados por el laboratorio de marcha son agrupados como un conjunto de medidas y presentados al experto como un reporte clínico reuniendo elementos objetivos que permite al experto determinar y hacer seguimiento de diferentes patologías asociadas con el movimiento, por ejemplo la marcha dipléjica ocasionada por una comunicación deficiente de los comandos neuromotores puede ser identificada mediante los patrones cinemáticos (básicamente las relaciones angulares y el registro de la longitud del paso), en donde se evidencian movimiento descoordinados de las piernas, las rodillas se flexionan, los tobillos mantienen una aducción y rotación interna extendida, mientras el tronco generalmente permanece inclinado. Además, la representación virtual de la marcha complementa la información cuantitativa con análisis cualitativos que permiten realizar una estimación muy precisa de la patología.
En la literatura se han reportado múltiples sistemas para el análisis cuantitativo y observacional del movimiento (Huiyu, 2004; Liang et al., 2003). Cada uno de los cuales adquiere información dinámica desde dispositivos de diferente naturaleza y con diferente protocolo de estandarización. En general, la arquitectura de administración de dispositivos en los sistemas comerciales dificulta la integración de componentes de algún otro fabricante y no se permite el acceso a ellos debido a su arquitectura cerrada en cuanto a la capacidad de adoptar fácilmente componentes de otros fabricantes. Además no son los suficientemente flexibles para permitir la reutilización de los datos adquiridos de forma transparente.
Este trabajo presenta el diseño y desarrollo de un laboratorio de marcha, elaborado bajo una arquitectura modular, que permite acceso eficiente a los datos de múltiples dispositivos de captura e integración de los diferentes módulos (dinámico y cinemático). Por acceso eficiente se entiende la organización granular de los datos, siguiendo el estándar biomecánico C3D, de forma síncrona (Attias, 2001). La arquitectura desarrollada ofrece la flexibilidad para usar diferentes protocolos descritos en la literatura (newington, Gage, Davis, Helen Hayes, VCM (Vicon Clinical Manager) o usar nuevos protocolos desarrollados para el análisis de movimientos particulares que le permiten al experto realizar evaluaciones específicas de diferentes partes de la estructura del cuerpo humano o encontrar relaciones especificas de la dinámica del movimiento. Además, el Laboratorio de Marcha permite manipular los datos registrados desde cada uno de los módulos diseñados, lo que resulta útil para desarrollar diferentes proyectos de investigación en donde se buscan nuevas metodologías para el análisis y evaluación de la marcha. El artículo está organizado de la siguiente forma: la sección 2, describe la metodología de diseño y desarrollo del Laboratorio de Marcha propuesto, en la sección 3, se describen los resultados obtenidos en cada uno de los componentes que constituyen el Laboratorio de Marcha. Finalmente, en la sección 5 se presentan las conclusiones y el trabajo futuro.
MATERIALES Y MÉTODOS
El Laboratorio clínico de marcha se desarrolló bajo una arquitectura consistente en un conjunto de módulos y sub-módulos que permiten una fácil integración de componentes para captura, procesamiento y visualización de variables dinámicas de la marcha, como se ilustra en la Figura 1.
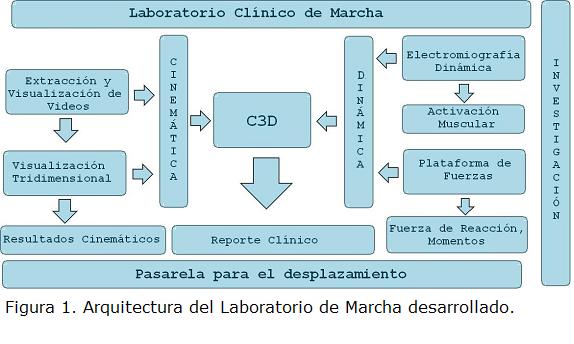
La administración de datos para análisis de movimiento se realiza a través del estándar Coordinate 3D (C3d), el cual permite almacenamiento flexible y eficiente de datos en aplicaciones de biomecánica (Attias, 2001; Oxford Metrics Ltd. C3d, 2000). El formato define un modelo de datos para el almacenamiento simultaneo y sincronizado teniendo como estructura principal para la administración de los datos las coordenadas espaciales que representan la estructura del cuerpo, cada coordenada con un tiempo asociado llamado muestra y cada muestra con sus datos dinámicos, permitiendo el almacenamiento simultáneo y sincronizado de los datos dinámicos y cinemáticos de la marcha. La arquitectura propuesta para el Laboratorio de Marcha, consiste de dos módulos principales, dinámico y cinemático, comunicados por medio del modelo de datos C3d. Dichos módulos generan registran y procesan los datos que constituyen un reporte clínico unificado, donde se presentan las variables dinámicas calculadas durante la evaluación del movimiento (Fig. 1), integrando información heterogénea proveniente de diferentes fuentes de captura. La arquitectura propuesta incluye un modulo transversal que permite el uso de estas herramientas para investigación de forma tal, que puede hacer uso de cualquier modulo para adquirir los datos (procesados o crudos) en su respectivo estudio. En las siguientes sub-secciones se describirá en detalle los componentes del laboratorio de marcha de acuerdo a la arquitectura propuesta, definiendo los criterios de diseño y el procedimiento para su desarrollo.
ANÁLISIS DINÁMICO
Este modulo está encargado de cuantificar diferentes variables que describen la energía durante el movimiento: fuerzas y momentos de las articulaciones que intervienen en la marcha, fuerzas de reacción del pie sobre el piso y potenciales eléctricos asociados a la activación de grupos musculares.
En el laboratorio de marcha desarrollado, las variables dinámicas son obtenidas por dos plataformas de fuerza y un electromiógrafo , como se describe a continuación:
Plataformas de fuerzas. Las plataformas de fuerza son dispositivos electromecánicos que miden las fuerzas y momentos de reacción que se ejercen sobre una superficie, con el objetivo de registrar y analizar las cargas de acción y reacción (fuerza, impulso, coordenadas de presión plantar) al caminar, correr o saltar (Zumwalta , 2006; Heglund, 1981).
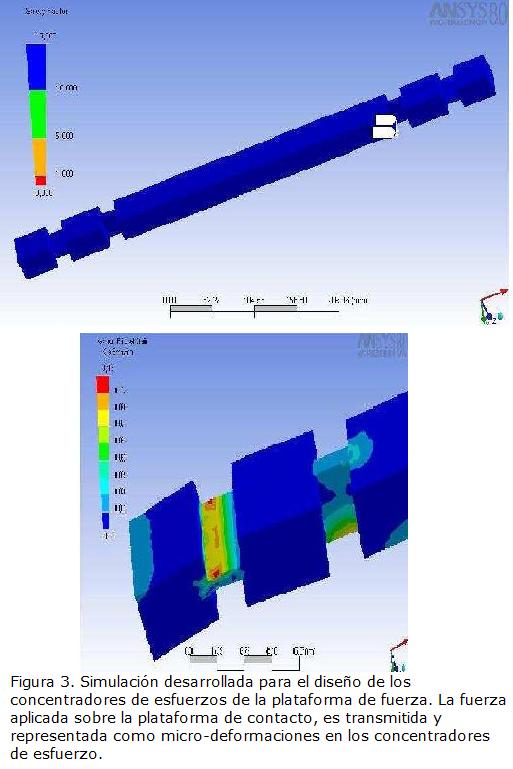
Las plataformas diseñadas están compuestas de un sistema mecánico y uno electrónico que registra las diferentes relaciones biomecánicas. El sistema mecánico consiste de dos concentradores de esfuerzo y una placa de contacto (60 cm x 40 cm), como se ilustra en la Figura. 2. Cuando una fuerza se aplica sobre la placa de contacto, los concentradores de esfuerzos sufren micro-deformaciones en sus extremos (Fig 3), que son registradas por el sistema electrónico que acondiciona la señal para transmitirla al computador.
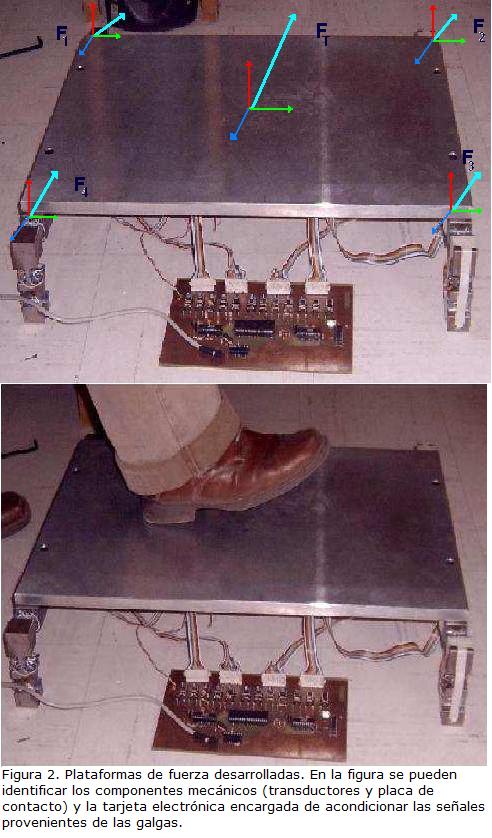
El sistema electrónico cuenta con un conjunto de galgas extensiométricas ubicadas en los extremos del concentrador, cuya resistencia varía en función de la deformación. Estas galgas presentan un buen comportamiento en frecuencias bajas y alta linealidad, características ideales para el registro de las deformaciones. Una vez amplificada, filtrada y digitalizada, la señal obtenida de las galgas se transmite al computador mediante el protocolo USB. La Figura 2 ilustra el sistema mecánico y electrónico acoplado. Para impedir el deslizamiento o el apoyo no uniforme sobre las plataformas, éstas se fijan rígidamente sobre una pasarela de desplazamiento como se ilustra más adelante.
Utilizando las ecuaciones de equilibrio estático de la placa de contacto y teniendo en cuenta la distribución de la fuerza de reacción sobre los concentradores, se calculan las tres componentes de la fuerza de reacción, las coordenadas del punto de aplicación de la fuerza vertical resultante y el momento torsor en cada instante de tiempo. Una aplicación computacional administra los datos provenientes del sistema electrónico y genera una representación de las fuerzas y los momentos de reacción, como se ilustra en la Fig. 4,. Una vez obtenidas las relaciones de fuerza y los momentos de reacción sobre la plataforma, se estiman las fuerzas y momentos en cada una de las articulaciones utilizando una aproximación de la estructura antropométrica del paciente, típicamente calculada a partir de los datos de video (Gage, 2001).
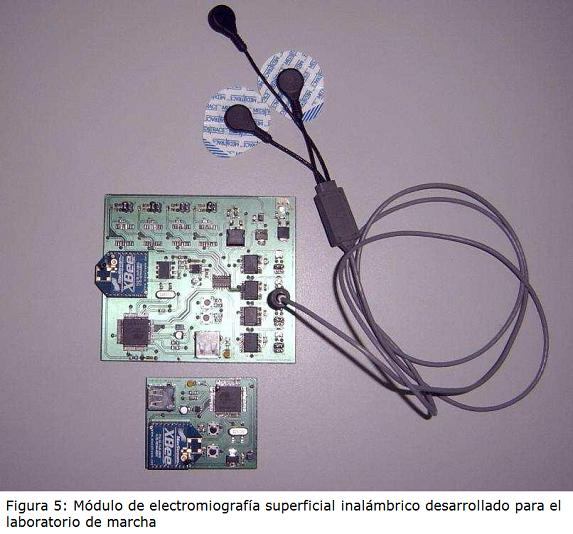
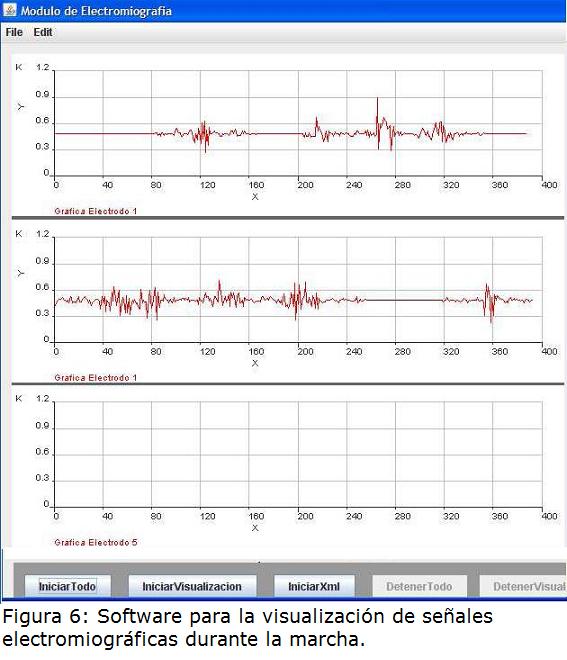
Electromiografía dinámica. Para la evaluación de la activación muscular durante la marcha, se desarrolló un prototipo de electromiografía dinámica superficial (EMG), capaz de registrar los potenciales eléctricos asociados a la contracción de los músculos activados en cada fase de la marcha, como se ilustra en la Figura 5. Ocho electrodos duales superficiales (Carlos, 1997; Health Service, 1992) miden la activación de diferentes grupos musculares. Estas señales son amplificadas, filtradas, digitalizadas y transmitidas inalámbricamente al computador mediante un sistema de radiofrecuencia.
La señal de electromiografía es adquirida a través de sondas NORAXON (NORAXON, USA, Scottsdale, Arizona), que cuentan con una amplificación primaria. Con el fin de obtener la información relevante para el análisis de movimiento, la señal de electromiografía se sometió a un proceso de filtrado pasa-bandas con frecuencias de corte entre 10 Hz y 400 Hz (Jeffre y Janet, 2003). Las señales filtradas son amplificadas, multiplexadas mediante el circuito integrado cd74hct4051, y finalmente digitalizadas a 10 bits, resultando en una resolución de 2.5 mV. Las señales digitalizadas son enviadas a un módulo Zigbee encargado de transmitir por radiofrecuencia los paquetes al computador destinado a la recolección de los datos. Estos datos son almacenados en archivos C3d y posteriormente visualizados (Fig 6).
Con el fin de no alterar los patrones naturales de la marcha del paciente, el diseño del hardware tuvo en cuenta aspectos ergonómicos (Macias et al., 2003) como tamaño, peso y transmisión de datos. Este análisis tuvo como resultado el diseño de una placa electrónica pequeña de (9 cm x 10,5 cm), de poco peso, de fácil transporte y con transmisión inalámbrica de datos.
ANÁLISIS CINEMÁTICO
El módulo cinemático del laboratorio de marcha permite describir el desplazamiento del paciente, a través de una simplificación de su estructura, usando aproximaciones de las posiciones de los centros de giro de cada una de las articulaciones que intervienen en la marcha. Estas posiciones son estimadas a través de técnicas de análisis de video, como se describe a continuación.
Extracción de parámetros cinemáticos. Para el análisis cinemático se desarrolló un sistema de captura en video del movimiento en diferentes proyecciones. El sistema consiste de seis cámaras distribuidas espacialmente alrededor de la pasarela. Inicialmente, los videos capturados desde diferentes perspectivas son visualizados y usados por el experto para un análisis observacional del movimiento, pudiendo de esta forma analizar con un mayor grado de detalle patrones de movimiento de interés para un caso particular.
Al mismo tiempo, los videos capturados contienen información que permite obtener una reconstrucción simplificada de la estructura del cuerpo. Esta información se obtiene al segmentar un conjunto de marcadores ubicados en diferentes puntos anatómicos de interés, de acuerdo a un protocolo especifico (Baker, 2006), que permite inferir el cambio espacial en las posiciones de las articulaciones durante el movimiento.
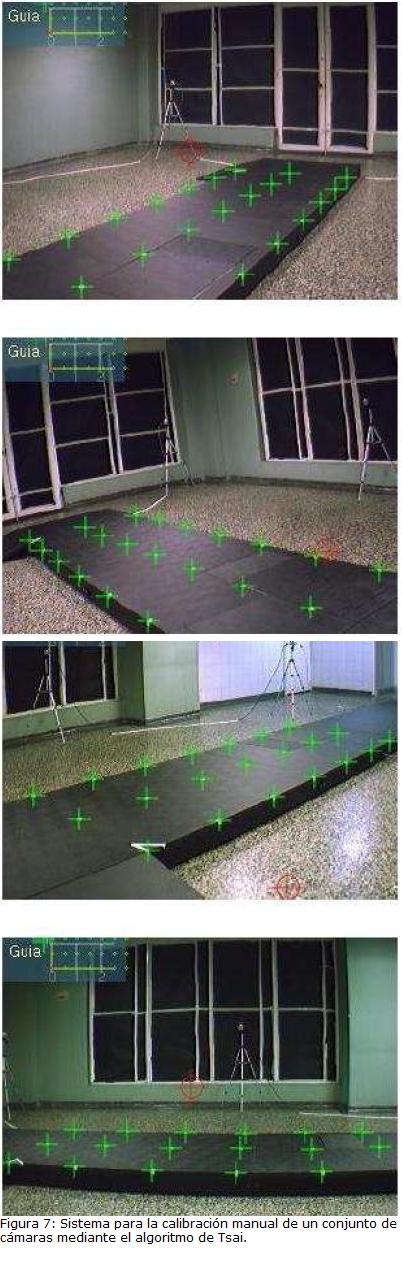
En este trabajo, la captura en video del paciente es realizada por seis cámaras Firewire IEEE1394 a color, con resolución de 640x480 y una frecuencia de captura de 30 cuadros por segundo, suficiente para el registro de la marcha Inicialmente. El sistema requiere de un proceso de calibración manual realizado por el usuario, consistente en la ubicación de marcas previamente definidas sobre la pasarela, utilizadas para alinear el sistema de coordenadas de la imagen con sus respectivas posiciones reales en tres dimensiones, como se ilustra en la Figura 7. Los parámetros intrínsecos y extrínsecos de la cámara son encontrados mediante el algoritmo de TSai (Tsai, 1986), que recupera el centro de la proyección en cada cámara y las relaciones correspondientes entre la imagen y el espacio de trabajo de captura, de esta forma el espacio donde se desarrolla el movimiento del paciente queda completamente caracterizado. Este proceso involucra además la sincronización en la captura de datos.
Una vez el sistema se encuentra calibrado, los datos de marcha son adquiridos por el sistema de adquisición del movimiento. Para cada video, los marcadores visibles en cada cuadro del video son extraídos. Los marcadores se obtienen mediante substracción del fondo y umbralización simple, bajo la hipótesis que los objetos con mayor brillo en la escena son los marcadores y que los objetos con mayor brillo en la escena son losmarcadores.
Una vez obtenidas las regiones que representan cada marcador en los diferentes videos procesados, se calcula su posición 3D mediante triangulación desde las diferentes perspectivas, cuyo error disminuye mediante un proceso de filtrado sobre todos los puntos en 3D. Las trayectorias tridimensionales de los marcadores durante el movimiento, constituyen la base para el modelo articulado que representa la estructura del cuerpo humano.
Visualización tridimensional. Para el análisis observacional de la cinemática, se desarrolló un sistema para la visualización de la marcha del paciente en un ambiente virtual, como se ilustra en la Figura 8,. Este sistema permite la visualización de los puntos 3D que representan una aproximación para la representación de la estructura del cuerpo en movimiento en un ambiente virtual. Adicionalmente, se registran gráficas de los patrones de movimiento de la estructura simplificada del cuerpo obtenida a partir de los marcadores.
Las posiciones en 3D registradas son administradas por este sistema, con el fin de ob tener diferentes patrones, como la variación angular de cada una de las articulaciones, la longitud del paso y la velocidad de cada uno de los segmentos de los miembros inferiores de la marcha.
Adicionalmente, esta aplicación permite el manejo y control de datos estructurados (estándares biomecánicos (C3D) o archivos XML), con lo que se puede simular dife rentes modelos simples de la marcha en un ambiente virtual. Un ejemplo de la estruc tura de los archivos XML se puede ver como sigue:
PASARELA PARA EL DESPLAZAMIENTO DEL PACIENTE
La pasarela del laboratorio de marcha es una estructura de 7,5 m de longitud y 1,2 m de ancho que permite el desplazamiento libre del paciente y contiene las plataformas de fuerzas. La estructura consiste en una rampa que permite ascender a la pasarela y un mecanismo para modificar la posición de las plataformas de fuerza de acuerdo a la longitud del paso del paciente (Figura 9).
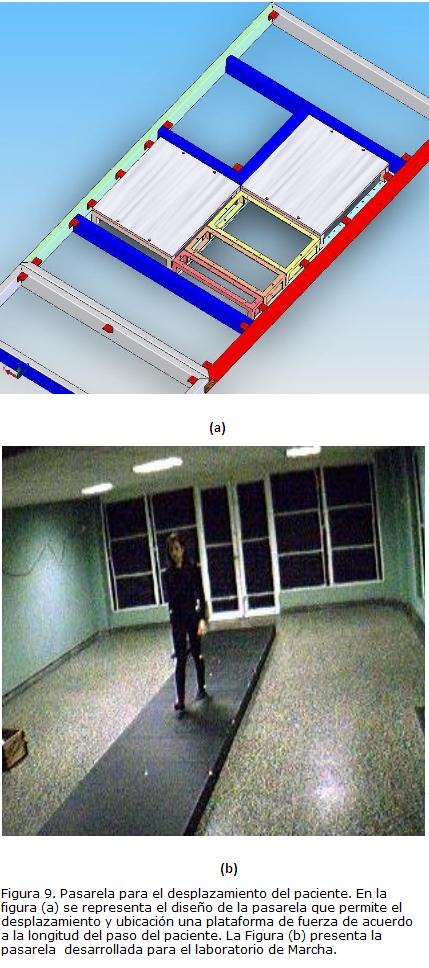
La pasarela cuenta con un tapiz opaco que sirve como recubrimiento y permite una captura apropiada de los marcadores y puntos de interés del proceso de calibración. Este tapiz además oculta las plataformas, con el objeto de impedir la tendencia natural del paciente a pisar sobre su centro.
MÓDULO BASE PARA TRABAJOS DE INVESTIGACIÓN
El Laboratorio de Marcha integra un módulo de investigación en áreas de análisis de movimiento humano, desde la perspectiva clínica y tecnológica, gracias a la arquitectura modular, la integración sincrónica y el fácil acceso a los datos.
RESULTADOS
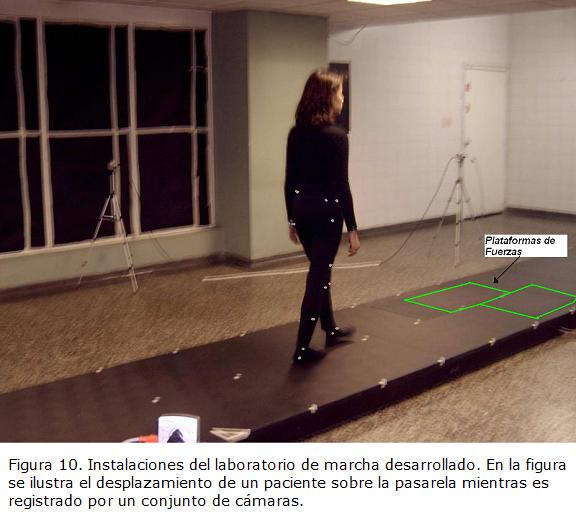
Los resultados obtenidos por las diferentes herramientas de adquisición desarrolladas para el Laboratorio de Marcha fueron evaluados por un experto en el análisis clínico de la marcha quien basado en su experiencia avaló el funcionamiento en cada uno de los módulos del Laboratorio, verificando que cada uno de los patrones de movimiento registrados por el Laboratorio de Marcha coincidieran con los patrones registrados por otros laboratorios. La Figura 10 muestra las instalaciones del laboratorio de marcha, durante el registro de los patrones de movimiento de una persona.
PLATAFORMA DE FUERZA
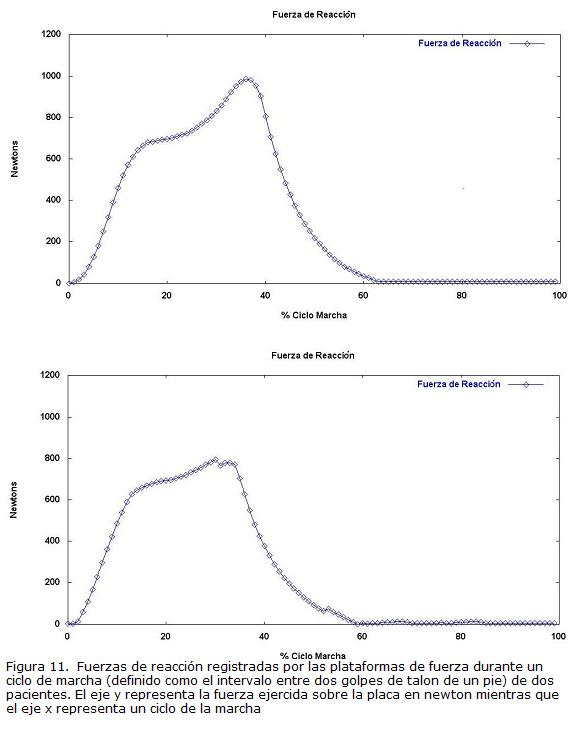
La fuerza de reacción que ejerce el pie sobre el piso durante la marcha, cambia en magnitud y sentido de forma dinámica mientras el pie oscila debido al cambio acelerado o desacelerado del centro de masa en cada fase de marcha.
Para la validación de los datos registrados por las plataformas de fuerza se evaluó la fuerza de reacción registrada por un paciente que describe patrones de marcha normal cuando cambia de la fase de balanceo a la fase de estancia, como se ilustra en la Figura 11. Como se puede observar en la figura, inicialmente el paciente se encuentra en doble soporte, es decir, ambos pies están en contacto con la tierra. A partir del golpe de talón, la fuerza de reacción incrementa rápidamente en magnitud mientras la carga externa es transferida desde una extremidad a otra. En consecuencia, el centro de masa se desplaza de forma acelerada hacia su punto más alto durante el ciclo de marcha y luego se desacelera conduciendo su desplazamiento hasta un mínimo relativo producto de la disminución en la magnitud de la fuerza de reacción, que puede ser menor al peso del paciente dependiendo de la velocidad del movimiento, se produce una segunda aceleración del centro de masa (despegue de los dedos), lo cual genera nuevamente un aumento en la magnitud de la fuerza de reacción. Finalmente, durante el segundo soporte doble el peso es transferido de una extremidad a otra y la fuerza de reacción es cero.
ELECTROMIOGRAFÍA DINÁMICA
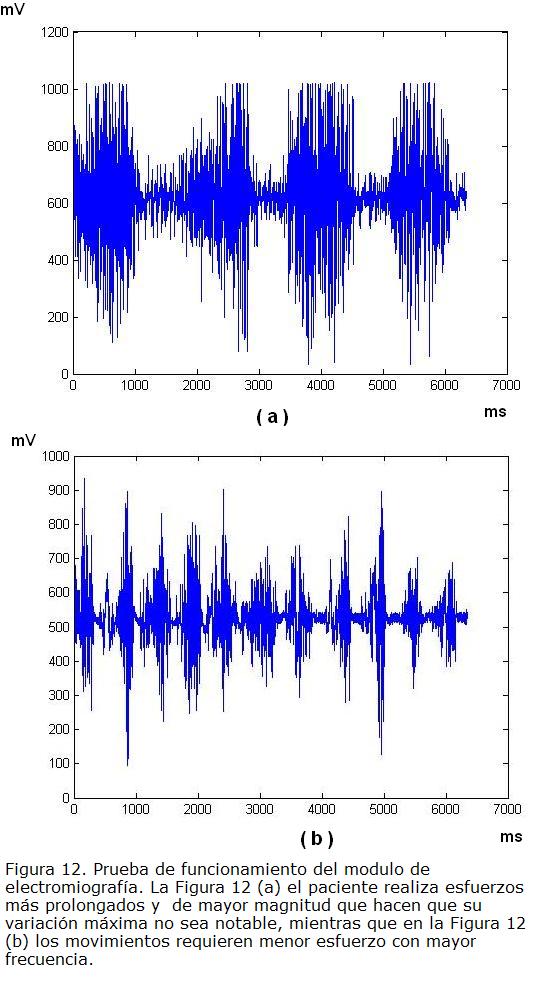
El modulo de electromiografía dinámica registra señales eléctricas que representan la suma de múltiples unidades motoras de potencial de acción (MUAP), permitiendo de esta forma valorar alteraciones musculares como atrofias y contracturas musculares. Cada señal representa la contracción del conjunto muscular de estudio, donde la amplitud y densidad de la señal aumenta proporcionalmente a la contracción del músculo. Para la evaluación del modulo de electromiografía se registro la actividad muscular presente en la zona del músculo bíceps braquial, seleccionado debido a su fácil identificación y su definición con respecto a otros músculos. Una vez identificado el músculo, unexperto ubicó un par de electrodos según los procedimientos clínicos convencionales (Vaughan, 1999). Durante esta evaluación se registro la flexión del antebrazo sobre el brazo. Inicialmente, se le pidió al paciente desarrollar la actividad con mayor esfuerzo, resultando en una señal electromiográfica de magnitud elevada y con una densidad notable, como se ilustra en la Figura 12 (a). Seguidamente, el paciente desarrolló esta actividad de forma ligera y con un menor esfuerzo, obteniéndose un registro electromiográfico menos denso y con aumentos casi puntuales en la magnitud de la señal (Figura 12 (b)).
CINEMÁTICA DEL MOVIMIENTO
Un experto clínico pudo desarrollar un análisis observacional a partir de la aplicación que visualizaba los videos capturados desde diferentes vistas. El sistema virtual permitió al experto simular el movimiento del paciente y obtener un análisis observacional con un mayor grado de detalle gracias a las herramientas dispuestas por la aplicación como: la rotación, traslación y Zoom.
Teniendo en cuenta la ubicación de las cámaras en un radio menor a 5 metros alrededor del paciente en movimiento se desarrollaron diferentes pruebas para identificar el error asociado a la identificación de los marcadores, lo que se refiere a la capacidad del método de segmentación para encontrar la posición real de los marcadores en las imágenes evaluadas, como se presenta en la Tabla 1.
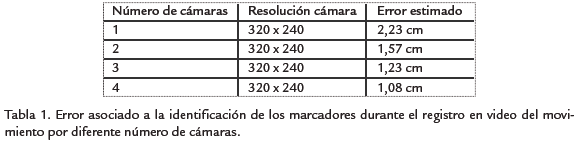
Como se puede observar en la Tabla 1 a mayor número de cámaras se puede disminuir el error, ya que esta la segmentación de cada marcador puede ser ajustada por cada una de las vistas, así como también se evitan problemas de ocultación.
MÓDULO BASE PARA TRABAJOS DE INVESTIGACIÓN
Una de las primeras investigaciones soportadas por este modulo fue el desarrollo de un modelo computacional para el seguimiento del Centro de Masa (CoM) durante la marcha bajo un esquema Bayesiano, como se ilustra en la Figura 12 (Martínez, 2010). Este trabajo introduce una estrategia Bayesiana para el seguimiento del CoM, sobre la base de un modelo biomecánico de la marcha propuesto por Garcia et al. (Garcia et al., 1998) (Conocimiento a priori) y un conjunto de marcadores ubicados alrededor de la zona sacra (observaciones).
CONCLUSIONES Y PERSPECTIVAS
El análisis de muchas patologías del sistema musculo esquelético ha mejorado de forma notable con el uso de herramientas complejas como los laboratorios de análisis de la marcha que permiten cuantificar cualquier patología asociada con el movimiento, de manera que se pueda medir objetivamente el impacto de cualquier tratamiento. En este trabajo se presento el diseño y desarrollo un laboratorio de marcha, conformado por un conjunto de herramientas que cuantifican diferentes patrones dinámicos del movimiento. Este laboratorio tiene como objetivo el estudio computarizado de la marcha de individuos sanos y de pacientes con diferentes enfermedades musculoesqueléticas y neuromusculares, sirviendo como plataforma para el desarrollo de actividades clínicas, educativas y de investigación. El laboratorio de marcha presenta una arquitectura abierta, robusta y de fácil acceso para el registro sincronizado de las diferentes variables dinámicas provenientes de diferentes fuentes de adquisición: electrónica (modulo de electromiografía), electromecánica (plataformas de fuerza) y sistemas de procesamiento de video (análisis cinemático). A pesar de los diferentes avances obtenidos en los últimos años en el análisis de marcha aun existen problemas por la variabilidad y reproducibilidad en las medidas obtenidas. En este trabajo se presentó una estrategia para el seguimiento del CoM del cuerpo humano que consiste en simular la dinámica del sistema usando un modelo biomecánico del sistema locomotor. El modelo fue probado exitosamente usando un conjunto de datos de HumanEva (Sigal, Black, 2006), presentando una reducción en el error cuadrático medio (RMSE) del 58% frente a métodos tradicionales para el seguimiento del CoM.
AGRADECIMIENTOS
Un agradecimiento especial a Karen Ortega, Alfredo Espitia y Jorge Victorino quienes hicieron parte del equipo de desarrollo de este proyecto y su contribución fue valiosa para cumplir con el objetivo de este proyecto. El grupo de investigación BioIngenium logró el desarrollo de un laboratorio para el estudio computarizado de la marcha con el apoyo económico de la Facultad de Medicina de la Universidad Nacional de Colombia.
BIBLIOGRAFÍA
BAKER R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 2006; 3:1-4.
[ Links ]BARBIER F, ALLARD P, GUELTON K, COLOBERT B, GODILLONMAQUINGHEN A. Estimation of the 3D center of mass excursion from force plate data during standing. IEEE Trans Neural Syst Rehabil Eng. 2003;11:31-37.
[ Links ]CARLOS J. The Use of Surface Electromyography in Biomechanics. J Appl Biomech. 1997;13:135-163.
[ Links ]DATTA D, HELLER B, HOWITT J. A comparative evaluation of oxygen consumption and gait pattern in amputees using Intelligent Prostheses and conventionally damped knee swing-phase control. Clin Rehabil. 2005;19:398-403.
[ Links ]GAGE J. Gait Analysis in Cerebral Palsy. NY: MacKeith Press. 2001.
[ Links ]GARCIA M, CHATTERJEE A, RUINA A, COLEMAN M. The simplest walking model: Stability, complexity, and scaling. J Biomech Eng. 1998;120:281-288.
[ Links ]GAVRILA M. The visual analysis of human movement: a survey. Comput. Vis. Image Underst. 1999;73:82-98.
[ Links ]HAUSDORFF J, DEAN R, HELEN E. Gait variability and fall risk in community-living older adults: A 1-year prospective study. Arch Phys Med Rehabil. 2001;82:1050-1056.
[ Links ]HEALTH SERVICE. Selected Topics in Surface Electromyography for Use in the Occupational Setting: Expert Perspectives. 1992.
[ Links ]HEGLUND N. A simple design for a force-plate to measure ground reaction forces. Journal exp Biol. 1981;93:333-338.
[ Links ]HUIYU Z, HUOSHENG H. A Survey-Human Movement Tracking and Stroke Rehabilitation. Technical Report. 2004;33.
[ Links ]J ATTIAS. C3dfile format extensions. Vicon Motion Systems, 2001.
[ Links ]JEFFREY I, JANET W. Sampling rate effects on surface EMG timing and amplitude measures. Clin Biomech 2003;18:543-552.
[ Links ]LEWALLEN R, DYCK G, QUANBURY A, ROSS, K, LETTS M. Gait Kinematics in Below-Knee Child Amputees: A Force Plate Analysis. J Pediatr Orthop B. 1986;6(3):291-298.
[ Links ]LIANG W, WEIMING H, TIENIU T. Recent developments in human motion analysis. Pattern Recognit. 2003;36:585-601.
[ Links ]MACIAS H, RIVERA J, ACERO C, GARCIA A. Diseño Ergonómico de Sistema de Electromiografía Portátil. IX Workshop Iberchip. 2003;50-54.
MARTÍNEZ F, GÓMEZ F, ROMERO E. A Kinematic Method for Computing the Motion of the Body Center-of-Mass (CoM) During Walking: A Bayesian Approach 2010. J Biomech Eng. 2011;14(6):561-562 [ Links ] [ Links ]OXFORD METRICS LTD. C3d(coordinate-3d). 2000.
[ Links ]SHELDON S. Quantification of human motion: gait analysis benefits and limitations to its application to clinical problems. J Biomech. 2004;37:1869-1880.
[ Links ]SIGAL L Y BLACK M. Humaneva: Synchronized video and motion capture dataset for evaluation of articulated human motion. 2006.
[ Links ]TIK-PUI D, YUE-YAN C, HONGC Y, SHU-HANG P, FUNGA K, CHANA K. Estimating the complete ground reaction forces with pressure insoles in walking. J Biomech. 2008;41(11):2597-2601.
[ Links ]TSAI R. An Efficient and Accurate Camera Calibration Technique for 3D Machine Vision. Proc IEEE Comput Soc Conf Comput Vis Pattern Recognit. 1986;3(4):364-374.
[ Links ]VAUGHAN C, BRIAN D, CONNOR J. Dynamics of human Gait. Kiboho Publishers. Second Edition. 1999.
[ Links ]WAGENAAR R, BEEK J. Hemiplegic gait: a kinematic analysis using walking speed as a basis. J Biomech. 1992;25:1007-1015.
[ Links ]ZUMWALTA A, HAMRICKB M, SCHMITTA D. Force plate for measuring the ground reaction forces in small animal locomotion. J Biomech. 2006;39(15):2877-2881.
[ Links ]
