










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkIngeniería y Universidad
versão impressa ISSN 0123-2126
Ing. Univ. vol.19 no.1 Bogotá jan./jun. 2015
https://doi.org/10.11144/Javeriana.iyu19-1.sprq
Software para la práctica de la robótica quirúrgica1
Software Tool for the practice on Robotic Surgery2
Diego Enrique Guzman Villamarín3
Óscar Andrés Vivas Albán4
1Fecha de recepción: 17 de junio de 2014. Fecha de aceptación: 20 de noviembre de 2014. Este artículo se deriva de un proyecto desarrollado por el grupo de investigación en Automática Industrial de la Universidad del Cauca, Popayán, Colombia.
2Submitted on: June 17th, 2014. Accepted on: November 20th, 2014. This article is derived from a project of the Industrial Automation Research Group of Universidad del Cauca, Popayan, Colombia.
3Ingeniero en Automática Industrial, Universidad del Cauca. Tekunoroji SAS, Popayán, Colombia. Correo electrónico: diegoguz1990@gmail.com
4Ingeniero Electrónico, Universidad del Cauca. Magíster en Automática, Ecole Centrale de Nantes, Francia. Doctor en Robótica, Université de Montpellier II, Francia. Profesor titular Universidad del Cauca, Popayán, Colombia. Correo electrónico: avivas@unicauca.edu.co
Para citar este artículo / To cite this article
D. E. Guzmán Villamarín y Ó. A. Vivas Albán, "Software para la práctica de la robótica quirúrgica", Ing. Univ., vol 19, no. 1, pp. 7-26. Ene.-Jun., 2015. http://dx.doi.org/10.11144/Javeriana.iyu19-1.sprq
Resumen
Este artículo presenta el desarrollo de un software que integra la utilización de robots quirúrgicos en un entorno virtual 3D y que lleva por nombre RoboSurgery. La herramienta ha sido diseñada para que los ingenieros puedan comprender el uso de los asistentes robóticos en operaciones de laparoscopia. Integra dos tipos de robots: uno portaendoscopio (robot Hibou) y dos quirúrgicos (robots LapBot), manipulados mediante un joystick. El sistema permite observar en una ventana el interior del abdomen del paciente, imagen virtual que es generada por el endoscopio situado en el órgano terminal del robot Hibou, mientras que se manipulan los dos robots quirúrgicos con el fin de realizar una colecistectomía (extracción de la vesícula). Los resultados muestran un sistema virtual bastante útil para la comprensión del funcionamiento de los asistentes quirúrgicos, según la evaluación realizada por un grupo de estudiantes y docentes. En un futuro esta herramienta podrá incluir otros robots y otros procedimientos, además de mayor realismo, al incluir algoritmos de deformación de órganos.
Palabras clave: robótica quirúrgica; operaciones de laparoscopia; entrenamiento quirúrgico por computador
Abstract
This article presents the development of a software tool for the practice on virtual robotic surgery. The tool is called RoboSurgery and it was designed for engineers that need training on how to use laparoscopic surgical robots. The tool contains two types of robots: an endoscopic holder robot (Hibou robot), and two surgical robots (LapBot robot), all of them handled by joystick. The system allows the observation of the inside of the abdominal cavity of the patient by a virtual image generated by the endoscopic holder camera, while the two surgical robots work on a virtual cholecystectomy (removal of the gallbladder). Results show a useful system to help understand the operation of laparoscopic robot-assisted procedures, according to the evaluation made by a group of students and teachers. In the future this tool could include more surgical robots and more surgical procedures, as well as more realism including body deformation algorithms.
Keywords: surgical robots; laparoscopic surgery; surgical training
1. Introducción
Aunque desde hace más de un siglo se iniciaron los experimentos en cirugía mi-niinvasiva sobre animales, no fue sino hasta finales de la década de 1980 cuando este procedimiento empezó a realizarse en seres humanos. Desde que Mouret realizó su primera colecistectomía laparoscópica (extracción de la vesícula) en 1987 [1], el interés en esta área no ha cesado de crecer y se ha extendido a una gran cantidad de procedimientos quirúrgicos [2], [3], [4].
En un procedimiento laparoscópico, los instrumentos quirúrgicos y un sistema de visión con una fuente de luz fría (endoscopio) son introducidos a través de pequeñas incisiones en la cavidad abdominal. La imagen transmitida por el endoscopio, la cual es manejada manualmente por un asistente humano, es observada en un monitor mientras el cirujano manipula dos instrumentos quirúrgicos guiado por la imagen que observa, todo esto sin necesidad de realizar una abertura del abdomen. Este tipo de intervención implica para el paciente una recuperación más rápida, con menos traumas y menores cicatrices respecto a una cirugía convencional. Sin embargo, ha traído nuevos desafíos para el cirujano, entre los cuales se encuentra el control de la cámara de video, la coordinación ojo-mano y la pérdida de la sensación de retorno debido a la fricción que se experimenta en el paso por la cavidad abdominal, entre otros. Se puede resumir diciendo que el paciente ha ganado mucho a expensas del mayor trabajo del cirujano.
Surgió, entonces, la idea de utilizar robots de asistencia para eliminar estos nuevos impedimentos. Incluso algunos autores han sugerido que en la historia de la evolución quirúrgica, la laparoscopia no es más que una transición tecnológica desde los procedimientos manuales hasta la cirugía completamente robotizada.
Básicamente existen dos tipos de asistentes quirúrgicos robotizados: los robots portaendoscopio como el Endoassist (Prosurgics, Reino Unido) [5], el Aesop (Computer Motion, Estados Unidos) [6] y el Lapman (Medsys, Bélgica) [7]; y los robots quirúrgicos propiamente dichos, como el Zeus (Computer Motion, Estados Unidos) [8] y el Da Vinci (Intuitive Surgical, Estados Unidos) [9]. Los primeros proporcionan la imagen interna bidimensional que el cirujano utiliza para guiarse dentro de la cavidad abdominal, mientras que los segundos se convierten en las manos del cirujano, supliendo las deficiencias que estas puedan tener, como la imprecisión o el temblor que aparece en las largas intervenciones.
Actualmente el más popular y avanzado robot asistente para operaciones de laparoscopia es el Da Vinci. Dicho robot contiene un brazo portaendoscopio y tres brazos quirúrgicos. A pesar de su costo, ha alcanzado bastante popularidad: hay cerca de 1.500 unidades en servicio en el mundo, de las cuales 17 están en España y 13 en Latinoamérica [10].
La irrupción de estas nuevas tecnologías robóticas en el mundo ha incrementado la colaboración entre los ingenieros y los médicos, simbiosis necesaria para llevar a cabo avanzados desarrollos en los cuales cada uno aporta desde su especialidad. Al respecto surge la necesidad de los médicos de entrenarse en las nuevas técnicas quirúrgicas, asistidas o no por robots, y por parte de los ingenieros, la necesidad de comprender la problemática profesional que involucra la laparoscopia, con el fin de proponer soluciones robóticas que colaboren en este sentido.
La simulación en computador del funcionamiento de robots asistentes en operaciones de laparoscopia serviría a unos y a otros para interactuar y compartir expectativas y soluciones sobre el tema. Sin embargo, debido a los altos costos que involucran los simuladores comerciales (muchos de los cuales trabajan directamente con el robot real), esta tarea no siempre es fácil.
En particular el mercado ofrece diversas herramientas de simulación dirigidas a los cirujanos, como el Lap Mentor, el LapSim, el Promis, el Mimic y el RoSS, los cuales proporcionan un alto nivel de formación quirúrgica a través de procedimientos básicos y avanzados en laparoscopia. Incluso los dos últimos trabajan muy estrechamente con el ambiente virtual que ofrece el robot Da Vinci. Estos simuladores están más orientados al procedimiento quirúrgico en sí mismo, independientemente de la herramienta que se utilice para llevarlo a cabo.
Sin embargo, no existen simuladores que permitan a los ingenieros interesados en la robótica quirúrgica visualizar este tipo de procedimientos utilizando robots, mientras que el área de la robótica industrial ofrece diversas herramientas de simulación (MatLab, Cosimir, RoboCell, EasyRob, etcétera). Es claro que dichas herramientas no permiten simular un procedimiento quirúrgico con detalle, ya que no fueron concebidas para tal fin.
El objetivo de este proyecto es, entonces, construir una primera versión de un software que permita a los ingenieros y a los estudiantes en ingeniería iniciar su aproximación a los desafíos que plantea la robótica quirúrgica, en particular las intervenciones de laparoscopia asistidas por robots, puesto que, a diferencia de la robótica industrial, la robótica quirúrgica cuenta con características muy particulares. La principal de ellas es el llamado "paso por el trocar", donde el robot debe mantener siempre un punto fijo en su movimiento, punto que corresponde al paso por el orificio abdominal, so pena de dañar al paciente.
El respeto de este punto fijo implica una complejidad adicional en las ecuaciones que definen la cinemática del robot, las cuales son innecesarias cuando el robot se mueve libremente en el espacio de trabajo como sucede en la robótica industrial.
Otra de las características propias de la robótica quirúrgica es la velocidad de trabajo, la cual, por razones de seguridad, es afortunadamente baja, comparada con los robots industriales.
Finalmente otras consideraciones que debe tener en cuenta un ingeniero al diseñar un robot para propósitos quirúrgicos son la precisión, la facilidad de uso por parte del cirujano, la redundancia en los sensores y actuadores, entre otras.
Teniendo en cuenta en esta primera versión de software solamente la primera característica de este tipo de mecanismos (mantenimiento de un punto fijo al ingreso de la cavidad abdominal), se ha construido una herramienta básica que involucra un robot portaendoscopio y dos robots quirúrgicos en una extracción de vesícula (colecistectomía), manipulados por un dispositivo joystick. Se espera que en un futuro esta herramienta pueda ser enriquecida con otros robots y en otras intervenciones quirúrgicas, incluyendo la deformación de órganos y la retroa-limentación háptica, tratando de aproximarse cada vez más a todas las complejidades que involucra una asistencia robotizada en operaciones de laparoscopia.
2. Materiales y métodos
En los últimos años se ha diseñado en la Universidad del Cauca, Colombia, un robot quirúrgico llamado LapBot [11], y un robot portaendoscopio llamado Hibou [12], como paso inicial con el fin de construir un sistema de simulación laparoscópica basado en robots.
El diseño y prueba de estos robots en simulación sirvió para definir claramente los requerimientos necesarios en una herramienta cuyo fin fuera orientar a los estudiantes de ingeniería en el uso de robots quirúrgicos. Dicha herramienta debía, por ende, incluir los robots necesarios para soportar tanto el endoscopio como los instrumentos quirúrgicos, y permitir que los orificios abdominales por donde entran estos elementos puedan variarse dependiendo del tipo de paciente y del tipo de intervención que se va a llevar a cabo.
Se escogió la extracción de vesícula biliar (colecistectomía) por ser una de las más populares intervenciones realizadas por laparoscopia.
El sistema se construyó de forma modular, con el fin de que en un futuro se puedan agregar otras configuraciones de robots quirúrgicos que hagan la práctica y comprensión de este problema más fácil para quienes diseñen este tipo de robots.
Finalmente varios estudiantes e ingenieros utilizaron la herramienta y sugirieron cambios y modificaciones según su experiencia con ella, lo cual permitió llegar a la primera versión de RoboSurgery.
A continuación se muestra el modelado matemático de los robots, los pasos para la realización de la cirugía y la implementación de la herramienta.
2.1. Robot LapBot
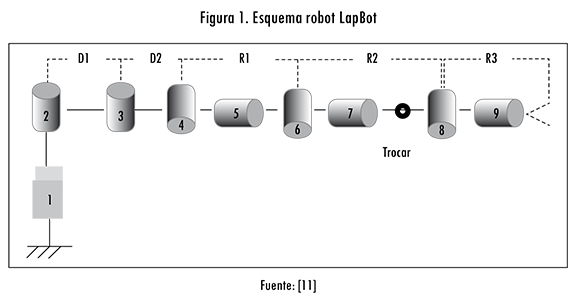
El robot LapBot [11] posee nueve grados de libertad, con seis articulaciones activas y tres pasivas, lo que le asegura el mantenimiento de un punto fijo al pasar por el trocar (orificio de la cavidad abdominal). Todas las articulaciones son de tipo rotacional, a excepción de la primera, que es prismática. La figura 1 muestra la estructura cinemática del robot LapBot, donde el anillo entre las articulaciones 7 y 8 representa el paso por la cavidad abdominal. Di y Ri hacen referencia a las distancias según la representación de Dombre y Khalil [13].
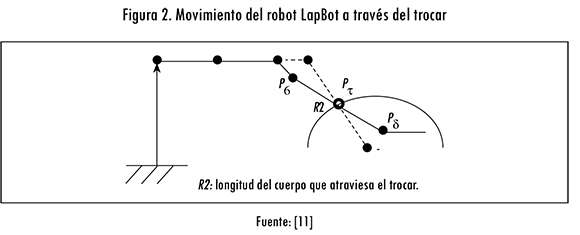
La figura 2 muestra el esquema utilizado con el fin de que las ecuaciones del modelo cinemático inverso tengan en cuenta el paso por el trocar (Pt) y mantengan ese punto fijo para cualquier movimiento del órgano terminal dentro del abdomen del paciente. Esto proporciona seguridad al procedimiento, garantizando que cualquier posición que tome el robot permitirá mantener fijo ese punto. En este caso el vector que va desde P6 hasta Pt debe ser colineal con el vector que va desde Pt hasta P8, con el fin de respetar la restricción espacial que impone el orificio practicado en la pared abdominal. Cabe resaltar que esta solución no es completamente segura, ya que se hace a partir del modelado matemático del robot, a diferencia de otras soluciones que son mecánicas, pero mucho más costosas y complejas de llevar a cabo [14], [15]. Sin embargo, es suficiente para una herramienta de simulación, aparte de que posee una estructura similar a la del robot Zeus.
2.2. Robot Hibou
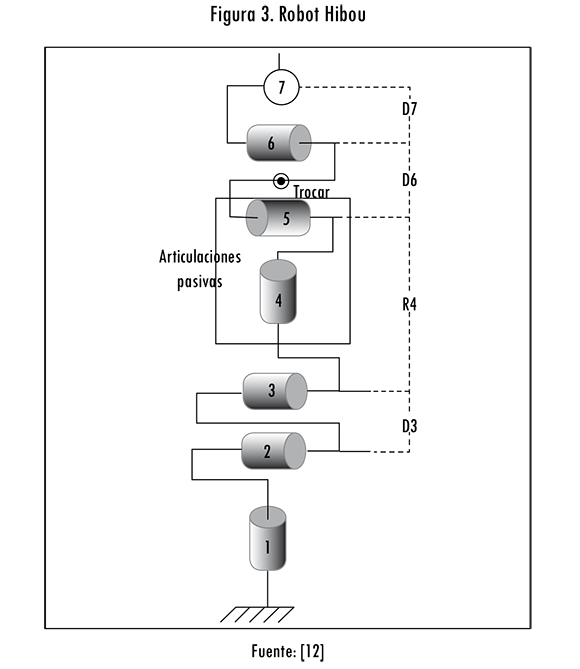
El robot Hibou [12] fue diseñado para soportar la cámara o endoscopio dentro del abdomen del paciente. Está compuesto por siete articulaciones rotacionales, cinco activas y dos pasivas, lo que asegura igualmente el mantenimiento de un punto fijo sobre la cavidad abdominal. La figura 3 muestra la estructura de este robot (el trocar se ubica entre las articulaciones 5 y 6).
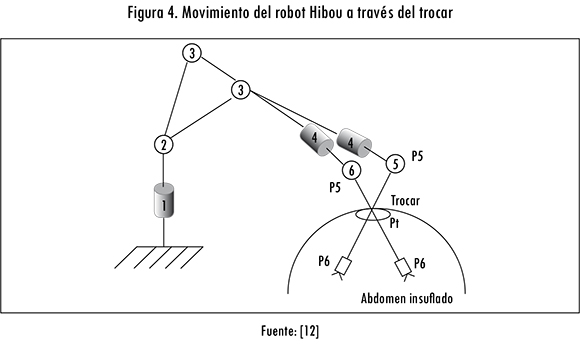
El problema del paso por el trocar fue resuelto como en el mecanismo anterior, planteando dos vectores colineales, los cuales representan el brazo del robot que pasa a través de la incisión abdominal. En el caso del robot LapBot se logró encontrar una solución analítica para el modelo cinemático inverso; sin embargo, en el robot Hibou este modelo debió ser calculado de manera numérica, dado que posee más articulaciones rotacionales que el LapBot, lo cual dificulta el cálculo de las variables articulares que cumplen con una posición cartesiana deseada. La figura 4 muestra el paso por la cavidad abdominal que realiza el robot Hibou.
2.3. Simulación de los robots
A partir de la modelización de Khalil [16] y del software Symoro [17], se obtuvo el modelo dinámico inverso de los robots Hibou y LapBot, basados en las siguientes ecuaciones:

Donde r representa los pares que van hacia los motores del robot, A es la matriz de inercia, C es la matriz de fuerzas centrífugas y de Coriolis, Q es el vector de gravedad, y q y q son las aceleraciones y velocidades articulares, respectivamente. Para el caso del modelo dinámico directo, el cual permite la simulación del robot, basta con despejar las aceleraciones articulares de la ecuación (1):

El modelo dinámico directo permite simular el comportamiento del robot en un software como MatLab, mientras que el modelo dinámico inverso permite la implementación de un controlador basado en el modelo de la planta. En este caso se utilizó un control por par calculado (CTC) [13], [18], [19], el cual incluye el modelo dinámico inverso del robot, con el fin de linealizar y desacoplar la compleja dinámica del mecanismo, asegurando teóricamente un comportamiento uniforme de manera que se pueda hacer uso de una técnica de control lineal. Para este caso se reescribe la ecuación (1) como sigue:

Donde en la matriz H se agrupan ahora las fuerzas centrífugas, la de Coriolis y la de gravedad. Si el modelo de la planta es suficientemente conocido, la nueva señal de control puede equipararse a un doble integrador, asegurándose así el desacoplamiento y la linealización del sistema. La figura 5 muestra el esquema del control CTC, el cual incluye la parte de desacoplamiento y linealización, y la parte de control lineal como tal.
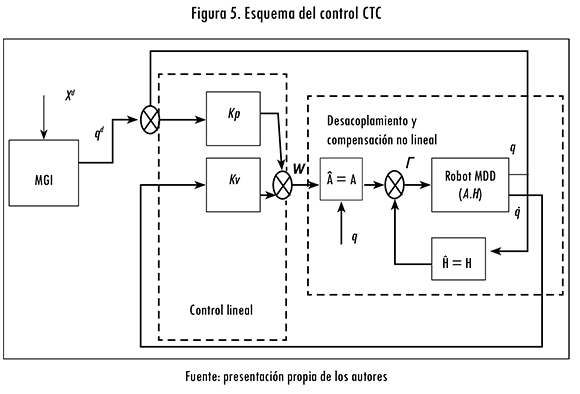
Se utiliza, igualmente, el modelo geométrico inverso (MGI) con el fin de transformar la consigna deseada en el espacio cartesiano en una consigna en el espacio articular del robot. Obsérvese que el control implementado es, simplemente, un proporcional-derivativo, suficiente para seguir las consignas deseadas e introducidas a cada mecanismo.
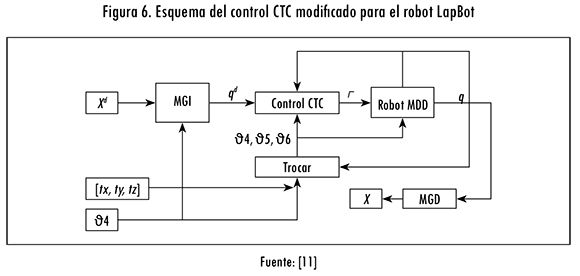
Sin embargo, el anterior esquema debe ser modificado, ya que el modelo geométrico se ve restringido por el paso a través del orificio abdominal. Esto significa que dicho modelo posee tres valores deseados adicionales que incluyen las coordenadas en x, y y z del punto de paso por el trocar. La figura 6 muestra el esquema de control modificado, en este caso para el robot LapBot, donde el valor de la articulación 4 (θ4) se fija en n/4, y se introducen los valores del punto de paso por el trocar (tx, ty, tz).
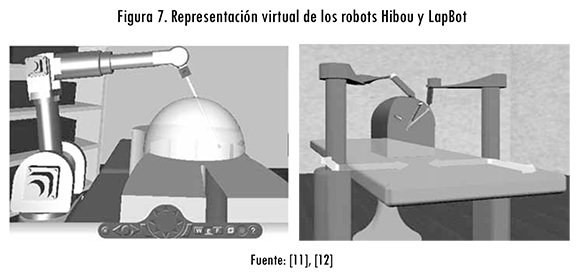
Posteriormente se verificaron los movimientos de cada robot en un espacio de tres dimensiones, manipulados por un joystick. Dicho dispositivo produce consignas en los tres ejes, las cuales son transformadas en consignas articulares para cada robot por medio del modelo geométrico inverso. Para el caso del robot Hibou la simulación se realizó con la toolbox Virtual Reality de MatLab, mientras que el robot LapBot se simuló en C++, con el fin de avanzar un paso más y observar su comportamiento en tiempo real, utilizando como motor de renderizado gráfico Ogre 3D (estas dos simulaciones se observan en la figura 7).
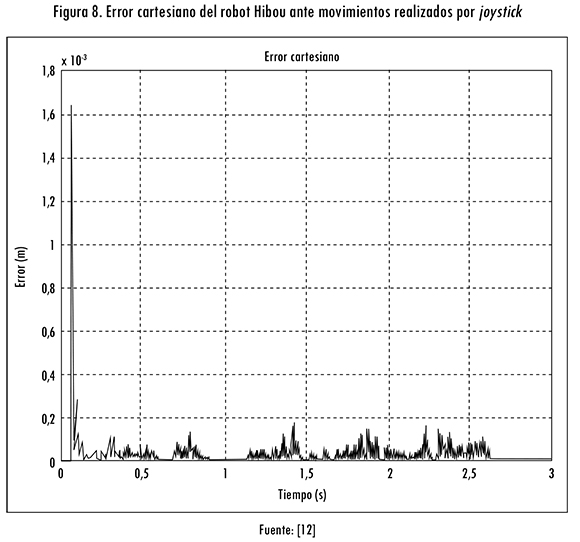
Como ejemplo, se muestra en la figura 8 el error cartesiano obtenido en MatLab con el robot Hibou, cuando con el joystick se reproduce una trayectoria en forma de cruz con la pieza terminal del robot, llevando el dispositivo a cada uno de sus cuatro extremos. El pequeño error obtenido (menor a 0,2 milímetros en estado estacionario) evidencia el buen desempeño del controlador por par calculado.
En la versión final del programa RoboSurgery se tomaron como base los resultados descritos, para unificar posteriormente todo y crear un solo programa en C++, utilizando VTK como motor gráfico, lo cual se explica en la sección 2.5.
2.4. Extracción de vesícula (colecistectomía)
La colecistectomía consiste en la extracción de una vesícula enferma, procedimiento realizado normalmente por cirugía mínimamente invasiva (laparoscopia). Para realizar la extracción, inicialmente se debe cortar tanto la arteria cística como el conducto que transporta la bilis (conducto cístico). Esta cirugía consta de las siguientes etapas [20], [21]:
- Exposición del conducto y arteria císticos: Procedimiento por medio del cual se tira de la vesícula de manera que quede expuesto el tejido que cubre tanto el conducto cístico como la arteria cística.
- Disección del triángulo de Calot: Se abre el tejido sobre el triángulo de Calot y se exponen tanto el conducto cístico como la arteria cística.
- Sección del conducto cístico y de la arteria cística: Se ponen grapas con una grapadora al inicio y al final del conducto y de la arteria, y posteriormente se corta con un bisturí en medio de las grapas.
- Disección de la vesícula del lecho hepático: Se separa la vesícula del lecho hepático por medio de un electrobisturí.
- Extracción de la vesícula biliar: Finalmente, se extrae la vesícula biliar a través del trocar practicado en la cavidad abdominal.
Dado que la primera versión de RoboSurgery no cuenta con algoritmos de deformación de órganos, por motivos de simplicidad se tienen en cuenta solamente las etapas 1), 3) y 5).
2.5. Desarrollo de RoboSurgery
RoboSurgery fue desarrollado en C++ sobre la plataforma Visual Studio 2008. La interfaz gráfica del programa está basada en QT y VTK, dos herramientas de código abierto bastante utilizadas en robótica médica [22], [23]. A continuación se describen brevemente las funciones de estas herramientas, así como las de otras, igualmente de código abierto, utilizadas en el desarrollo de RoboSurgery.
- QT: Permite un rápido y eficiente desarrollo de interfaces, generando el código fuente de estas. Además, provee el manejo sencillo de diversos recursos (íconos, imágenes de apoyo, etc). La ventana principal de RoboSurgery, los menús y las ventanas secundarias fueron realizados con QT.
- CMake: Plataforma cruzada de generación de código. Para el caso de Ro-boSurgery, la interfaz construida con QT fue luego transportada a Visual Studio, mediante CMake.
- MakeHuman: Aplicación gráfica diseñada para la construcción de humanos en tres dimensiones. Los pacientes de este proyecto (hombre, mujer y niño), se obtuvieron de la base de datos de MakeHuman.
- Blender: Programa dedicado al modelado, animación y creación de gráficos tridimensionales. Los robots Hibou y LapBot fueron creados en Blender, así como la sala de operaciones. Además, los pacientes fueron retocados con esta herramienta (insuflación del abdomen y posterior dimensionamiento en la ventana final).
- VTK: Librerías que permiten el renderizado. Estas potentes librerías manipulan fácilmente cualquier tipo de gráficos 3D. Todo el ambiente quirúrgico del programa (pacientes, robots y escenario) fue trabajado bajo VTK.
- GIMP: Programa para la edición de imágenes digitales, con el cual se le dio un retoque final a la interfaz realizada.
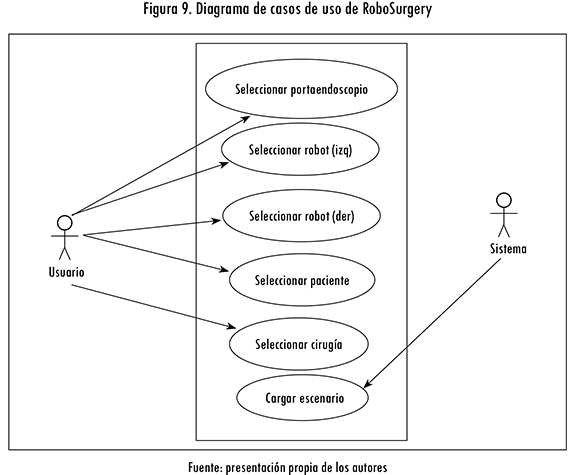
Para modelar los requisitos del sistema desde la perspectiva del usuario, se realizó el modelado de los casos de uso (figura 9). Es importante definir claramente qué necesita hacer el usuario, partiendo de la selección del tipo de procedimiento (laparoscopia diagnóstica o laparoscopia quirúrgica), el tipo de robot (solo Hibou o Hibou y LapBot, según el procedimiento) y el tipo de paciente (mujer, hombre y niño). Las relaciones entre los casos de uso y las clases desarrolladas pueden verse con mayor detalle en Guzmán [24].
2.6. Evaluación de la herramienta
La herramienta fue evaluada por medio de los usuarios para los cuales fue diseñada, es decir estudiantes de ingeniería de último año y docentes interesados en las problemáticas inherentes al diseño de mecanismos robóticos asistentes en operaciones de laparoscopia. La población estudiantil fue tomada principalmente de los estudiantes matriculados en la asignatura Robótica Médica de la Universidad del Cauca, en la cual confluyen estudiantes de programas de ingeniería en automática, electrónica y sistemas. Los docentes fueron profesores de los mismos programas. Sin embargo, también se incluyeron algunos estudiantes y docentes cuyo interés no se centra en ninguna de las ramas de la robótica.
A los evaluadores se les entregó un breve manual de usuario de la herramienta, así como una hoja en la cual se consignaban los principios básicos de la robótica quirúrgica y los objetivos generales de la herramienta (destinada, sobre todo, a aquellos evaluadores sin conocimientos en robótica). Posteriormente, cada evaluador tomó contacto con la herramienta siguiendo las instrucciones del manual, en un tiempo que varió entre 10 y 30 minutos. Al final se les hizo una encuesta con el fin de medir su percepción frente a la herramienta en aspectos como funcionalidad, facilidad de uso y utilidad. En la siguiente sección se mostrarán, entre otros, los resultados de dichas encuestas.
3. Resultados
Los robots se manipulan con un dispositivo joystick Genius F-17. En cuanto al software, las posiciones cartesianas que entrega este dispositivo son transformadas en posiciones articulares para cada robot, a partir de las ecuaciones del modelo cinemático explicadas anteriormente. Esta primera versión de RoboSurgery permite realizar dos tipos de procedimientos: 1) laparoscopia diagnóstica, en la cual solo el robot portaendoscopio Hibou está activado, permitiendo explorar con la cámara virtual la cavidad abdominal; 2) colecistectomía, en la cual se puede llevar a cabo la extracción virtual de la vesícula biliar, proceso en el cual intervienen los tres robots (el Hibou para posicionar la cámara de manera que se enfoque la vesícula, y los dos LapBot para llevar a cabo la extracción en sí). Para estos dos procedimientos se pueden cargar tres tipos de pacientes: una mujer, un hombre y un niño. La figura 10 presenta una vista del procedimiento de laparoscopia diagnóstica, donde solo trabaja el robot portaendoscopio Hibou. Un control deslizante en la parte derecha de la pantalla ("Opacity") permite manejar la transparencia del cuerpo del paciente, como se observa en la figura.

Para la operación de colecistectomía (laparoscopia quirúrgica), el procedimiento se detalla a continuación de acuerdo con las etapas nombradas en la sección 2.4. Cabe resaltar que dos pasos no han sido incluidos en el simulador (disección del triángulo de Calot y disección de la vesícula del lecho hepático) por razones de simplicidad.
- Activar el uso deljoystick (menú "Controllers" > "Joystick"). Luego mover el robot Hibou (después de haberlo activado con el botón correspondiente), de manera que se visualice la vesícula biliar, órgano en verde. Otro botón (en este caso el gatillo del joystick) se encargará de inmovilizar al robot portaendoscopio, de manera que siempre envíe la imagen de la zona de interés.
- Activar después el robot LapBot izquierdo con el botón correspondiente, llevarlo hasta la vesícula y cambiar el instrumento quirúrgico por pinzas ("Tweezers"), en el menú de la parte superior derecha. Tomar entonces la vesícula con las pinzas, presionando el gatillo del joystick, y moverla hacia arriba, lo cual corresponde al paso "Exposición del conducto cístico y de la arteria cística".
- Activar el robot LapBot derecho y llevarlo hasta la parte inferior de la arteria. Se presiona el gatillo del joystick y luego se cambia el instrumento de este robot por la grapadora ("Stapler"). Se pone, entonces, una grapa en la parte superior de la arteria y otra en la parte inferior, con el fin de interrumpir el flujo sanguíneo. Esto corresponde al paso "Sección del conducto cístico y de la arteria cística".
- Cambiar el instrumento quirúrgico del LapBot derecho por bisturí ("Scalpe") para realizar el respectivo corte. Cuando la arteria aparezca en color rojo significa que dicho corte ha sido realizado.
- Finalmente se extrae la vesícula halándola con el LapBot izquierdo, el cual está equipado con las pinzas. La vesícula desaparece entonces de la pantalla, lo cual corresponde al paso "Extracción de la vesícula biliar".
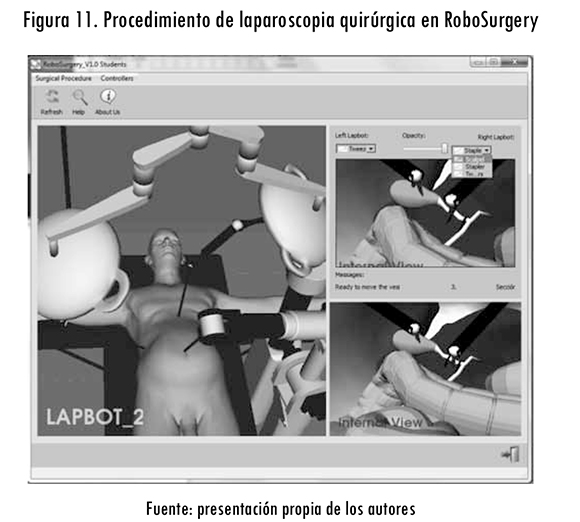
Por último, la figura 11 muestra una imagen completa de la herramienta durante el paso de grapado del conducto cístico y la arteria cística. Se observa en la parte superior derecha una imagen de la guía que da el programa al usuario durante el procedimiento, mientras que bajo esa guía se observa la imagen del interior del abdomen, con el fin de que el usuario compruebe el seguimiento de la extracción del órgano en cuestión.
En versiones futuras del programa se irán aumentando las funcionalidades de este software, por ejemplo incluir otro tipo de robots, así como otras intervenciones quirúrgicas (apendicectomía y bypass gástrico).
El proyecto podrá, entonces, tomar dos enfoques diferentes: el primero es incluir un programa adicional que permita modelar matemáticamente otros robots quirúrgicos y probarlos sobre la cavidad abdominal, teniendo siempre en cuenta el paso por el trocar; el otro es encaminar el software hacia el entrenamiento de cirujanos en el manejo de robots asistentes, opción que debe incluir mayor realismo en los procedimientos. Incluso se podría añadir una interfaz háptica para la retroalimentación de fuerzas y sensación táctil, lo cual haría que la práctica fuera mucho más realista.
El programa, diseñado para el sistema operativo Windows 7, se puede descargar gratuitamente de la siguiente dirección: www.unicauca.edu.co/ai/InstaladorRS. Igualmente, se puede descargar el manual del usuario para que el lector tenga una idea detallada de qué tanto puede realizar la herramienta.
Esta herramienta fue evaluada por 20 usuarios: diez estudiantes de la asignatura Robótica Médica de la Universidad del Cauca (asignatura de último año del programa de Ingeniería en Automática Industrial); cuatro estudiantes de último año de ingeniería automática, electrónica o de sistemas; cuatro docentes con conocimientos en robótica y dos docentes sin conocimientos en robótica (todos los docentes son de la Facultad de Ingeniería de la Universidad del Cauca).
Una vez los usuarios trabajaron la herramienta siguiendo las indicaciones de un manual destinado a ellos, contestaron una encuesta. Al respecto, se destaca que el 80% de los encuestados manifestó su alta satisfacción en relación con la ayuda que les prestó el programa en la comprensión de la problemática involucrada en la robótica quirúrgica, mientras que el 65% de los encuestados encontró que su manejo es bastante sencillo.
Como aspectos negativos se manifestó ante todo la velocidad del programa, ya que el hecho de tener dos ventanas activas en todo momento (la ventana principal y la ventana que muestra el interior del abdomen), ralentiza la ejecución del procedimiento, lo cual podría solucionarse, por ejemplo, utilizando otras técnicas de programación (por hilos) o aumentando las calidades del procesador o de la tarjeta gráfica utilizada.
Por último, se destacó el potencial que tiene el programa como herramienta educativa si se le adicionan otro tipo de robots y otras cirugías, además de algoritmos de deformación de órganos con el fin de lograr más realismo en la simulación.
Conclusiones
Este artículo presentó el diseño y construcción de un software para la práctica y experimentación de la robótica quirúrgica. Para ella se emplearon dos robots diseñados en la Universidad del Cauca, Colombia: el robot portaendoscopio Hibou, de siete grados de libertad, y el robot quirúrgico LapBot, de nueve grados de libertad. Se mostró la configuración de cada robot y cómo se obtuvo el modelo cinemático inverso, necesario para manipular cada mecanismo, en este caso a partir de un dispositivo joystick.
La herramienta permite cargar tres tipos de pacientes: una mujer, un hombre y un niño; es interesante el hecho de que cada uno trabaja con posiciones diferentes para el orificio abdominal. La interfaz de usuario muestra el paciente en el quirófano, así como la imagen virtual transmitida desde el interior del abdomen por el endoscopio, sostenido este por el robot Hibou.
El ambiente construido posee dos funcionalidades para cirugía mínimamente invasiva. La primera es la laparoscopia diagnóstica, donde solamente se activa el robot Hibou y mediante el joystick se puede realizar una exploración de los órganos de la cavidad abdominal. La otra funcionalidad es la laparoscopia quirúrgica, en la cual se practica con una colecistectomía (extracción de la vesícula) e intervienen tres robots: un robot Hibou para sostener el endoscopio y dos robots LapBot para realizar la extracción.
Tres de los cinco pasos que conlleva esta cirugía son recreados en este simulador: exposición del conducto cístico y de la arteria cística, corte respectivo y extracción de la vesícula. La activación de cada uno de los tres robots se realiza por medio de los botones del joystick utilizado.
El programa fue evaluado con diversos usuarios (estudiantes e ingenieros), y se obtuvieron buenos resultados en cuanto a la apreciación de sus funcionalidades.
Futuras versiones del programa incluirán otros robots y otras intervenciones quirúrgicas (bypass gástrico y extracción del apéndice), así como algoritmos de deformación de órganos e interfaces hápticas, con el fin de proporcionar mayor realismo a la aplicación.
Referencias
[1] IP Mouret, "How I developed laparoscopic cholecystectomy", Annals Academy Medicine Singapore, vol. 25, pp. 744-747, 1996. [ Links ]
[2] M. Jacobs, M. Gagner y J. Cueto-García, Laparoscopic surgery. New York: McGraw-Hill, 2003. [ Links ]
[3] N. Katkhouda, Advanced laparoscopic surgery: Techniques and tips. New York: Springer, 2010. [ Links ]
[4] R. Mishra, S. Wexner y R. Green, Textbook of practical laparoscopy surgery. New Delhi: Jaypee Brothers Medical Publishers, 2013. [ Links ]
[5] S. Kommu, P. Rimington, C. Anderson, et al., "Initial experience with the EndoAssist camera-holding robot in laparoscopic urological surgery", Journal Robotic Surgery, vol. 11, pp. 133-137, 2007. [ Links ]
[6] B. Kraft et al., "The Aesop robot system in laparoscopic surgery: increased risk or advantage for surgeon and patient?", Surgical Endoscopy, vol. 18, pp. 1216-1223, 2004. [ Links ]
[7] R. Polet y J. Donnez, "Using a laparoscope manipulator (Lapman) in laparoscopic gynecological surgery", Surgical Technology International, vol. 17, pp. 187-191, 2008. [ Links ]
[8] J. Marescaux y F. Rubino, "The Zeus robotic system: experimental and clinical applications", Surgical Clinics North America, vol. 83, pp. 1305-1345, 2003. [ Links ]
[9] R. Smith y M. Truong, Simulation in robotic surgery: a comparative review of simulators of the da Vinci surgical robot. Oviedo, FLA: Modelbenders Press, 2013. [ Links ]
[10] C. Vaessen, "Location of robotic surgical systems worldwide and in France",Journal Visceral Surgery, vol. 148, pp. 9-11, 2011. [ Links ]
[11] S. Salinas y A. Vivas, "Modelado, simulación y control del robot para cirugía laparoscópica LapBot", Revista Chilena Ingeniería, vol. 17, pp. 317-328, 2009. [ Links ]
[12] V. Torres et al., "Diseño y simulación en 3D de un robot porta endoscopio para operaciones de laparoscopia", en V Seminario Internacional de Ingeniería Electrónica, Bucaramanga, Colombia, septiembre 2011. [ Links ]
[13] E. Dombre y W Khalil, Modeling, performance analysis and control of robot manipulators. Londres: Wiley, 2010 [ Links ]
[14] Z. Wang, Z. Sun y S. Jay, "Haptic feedback and control of a flexible surgical endoscopic robot", Computer Methods Programs Biomedicine, vol. 112, pp. 260-271, 2013. [ Links ]
[15] A. Stoica et al. , "Kinematic, workspace and singularity analysis of a new parallel robot used in minimally invasive surgery", Frontiers Mechanical Engineering, vol. 8, pp. 70-79, 2013. [ Links ]
[16] W. Khalil y J. F. Kleinfinger, "A new geometric notation for open and closed loop robots", en Proceedings IEEE Conference on Robotics and Automation, San Francisco, USA, april 1986. [ Links ]
[17] W Khalil y D. Creusot, "Symoro+: A system for the symbolic modelling of robots", Robotica, vol. 15, pp. 153-161, 1997. [ Links ]
[18] A. Vivas, Diseño y control de robots industriales: Teoría y práctica. Buenos Aires: Elaleph, 2010. [ Links ]
[19] J. Lenarcic, T. Bajd y M. Stanisic, Robot mechanisms (Intelligent systems, control and automation: science and engineering). New York: Springer, 2014. [ Links ]
[20] L. Swanstrom y N. Soper, Master of endoscopic and laparoscopy surgery, 4ta. ed. Philadelphia: Lippicont Williams & Wilkins, 2013. [ Links ]
[21] F. Agresta, F. Campanile y N. Vettoretto, Laparoscopic cholecystectomy: An evidence-based guide. Dordrecht: Springer, 2014. [ Links ]
[22] P. Dias, J. Madeira y B. Sousa, "Teaching 3D modelling and visualization using VTK", Computer & Graphics, vol. 32, pp. 363-370, 2008. [ Links ]
[23] C. Zhang et al, "A robotic manipulator control and simulation system with Qt and VTK", Advanced Materials Research, vol. 462, pp. 712-719, 2012. [ Links ]
[24] D. Guzmán, "Herramienta software para la práctica y experimentación de la robótica quirúrgica", Tesis de pregrado, Universidad del Cauca, Popayán, Colombia, 2013. [ Links ]
