










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkTecnoLógicas
Print version ISSN 0123-7799On-line version ISSN 2256-5337
TecnoL. vol.18 no.34 Medellín Jan./June 2015
Artículo de investigación/Research article
Desempeño de redes inalámbricas y redes industriales inalámbricas en procesos de control en tiempo real bajo ambientes industriales
Performance in wireless networks and industrial wireless networks on control processes in real time under industrial environments
Juan F. Monsalve-Posada1, Alexander Arias-Londoño2, Juan G. Mejía-Arango3
1Ingeniero electrónico, Departamento de Electrónica y Telecomunicaciones, Instituto Tecnológico Metropolitano, Medellín-Colombia, jfmposada@gmail.com
2Magíster en Ciencias Computacionales, Departamento de Electrónica y Telecomunicaciones, Instituto Tecnológico Metropolitano, Medellín-Colombia, profeitm@gmail.com
3Magíster en Gestión Energética Industrial, Departamento de Electrónica y Telecomunicaciones, Instituto Tecnológico Metropolitano, Medellín-Colombia, juanmejia@itm.edu.co
Fecha de recepción: 26 de junio de 2014 / Fecha de aceptación: 1 de diciembre de 2014
Como citar / How to cite
J. F. Monsalve-Posada, A. Arias-Londoño y J. G. Mejía-Arango, “Desempeño de redes inalámbricas y redes industriales inalámbricas en procesos de control en tiempo real bajo ambientes industriales”, Tecno Lógicas, vol. 18, no. 34, pp. 87-99, 2015.
Resumen
El uso creciente de las redes Ethernet en el piso de la pirámide de automatización ha hecho que muchas compañías desarrollen dispositivos para operar bajo los requerimientos característicos de este nivel, en la actualidad denominada red Industrial Ethernet. A nivel industrial se encuentra en el mercado variedad de sensores y actuadores que incorporan esta tecnología, muchos de estos equipos se venden a muy alto costo, por eso en este artículo se evaluó el desempeño de dos redes inalámbricas, una con dispositivos del Ethernet convencional, y otra con dispositivos de Industrial Ethernet variando cuatro parámetros que son: distancia, número de bytes, relación señal a ruido y la tasa de error de paquetes, midiendo los retardos y comparando con métricas estadísticas los resultados, para ello se usaron gráficas Box Plot. Al final, se concluye que bajo los parámetros y condiciones evaluados, las redes inalámbricas pueden servir como sistema de comunicación en aplicaciones de control con retardos permisibles de hasta 50 ms, además, los resultados demuestran un mejor desempeño de las redes Industrial Ethernet con respecto a las convencionales, con diferencias en los RTT de milisegundos. Por lo tanto, se recomienda establecer qué riesgo representa para el proceso a controlar estos retardos y así determinar si los equipos convencionales aplican, ya que bajo ciertas características, como condiciones de humedad y temperatura, pueden operar adecuadamente durante un tiempo considerable y a un menor costo que los dispositivos de Industrial Ethernet.
Palabras clave: Industrial Ethernet, IWLAN, control, ambientes industriales, tiempo real.
Abstract
The growing use of Ethernet networks on the industrial automation pyramid has led many companies to develop new devices to operate in requirements of this level, nowadays it is called Industrial Ethernet network, on the market there are various sensors and actuators to industrial scale equipped with this technology, many of these devices are very expensive. In this paper, the performance of two wireless networks is evaluated, the first network has conventional Ethernet devices, and the second network has Industrial Ethernet devices. For the process we vary four parameters such as distance, number of bytes, the signal to noise ratio, and the packet error rate, and then we measure delays and compare with metric statistics results, Box Plot graphs were used for the analysis. Finally, we conclude that under the parameters and conditions tested, wireless networks can serve as a communication system in control applications with allowable delays of up to 50 ms, in addition, the results show a better performance of Industrial Ethernet networks over conventional networks, with differences in the RTT of milliseconds. Therefore, it is recommended to establish what risk is for the process to control these delays to determine if the equipment conventional applies, since under certain features like humidity and temperature can operate properly for a considerable time and at lower cost than devices to Industrial Ethernet.
Keywords: Industrial Ethernet, IWLAN, Control, Industrial Environment, Real Time.
1. Introducción
En la actualidad, los sistemas de control afrontan cambios y retos ocasionados por varios motivos, entre ellos la complejidad en los procesos de control en busca de una mejor calidad a menor precio en la producción, y otra no tan evidente pero que ha sido muy importante, la seguridad de los procesos productivos de tal forma que no represente riesgos para los operarios presentes en dichos procesos [1], [2]. En este contexto y de cierta forma buscando lograr estos objetivos, las redes inalámbricas han atraído la atención en los procesos de control, de manera que la industria de la automatización ha centrado sus mayores esfuerzos en el desarrollo de nuevos protocolos [3].
Hay un gran interés en la investigación y el desarrollo de redes inalámbricas [4]. En los sistemas de control en red, por ejemplo, hay un gran interés en el desarrollo de la tecnología inalámbrica como un reemplazo potencial para la actual generación de redes cableadas industriales [5]. Estas redes cableadas presentan grandes inconvenientes y desventajas que pretenden ser solucionadas mediante el uso de otras tecnologías como las comunicaciones inalámbricas. Las tecnologías cableadas actuales presentan dificultades en ciertos ambientes como la industria petroquímica y donde se usen dispositivos móviles y portátiles [6], [7].
Aplicaciones en lo militar, la industria, medicina y sectores comerciales son las que más motivan la solución de problemas cruciales asociados con los retardos y la pérdida de datos comunes en redes inalámbricas. La última meta aquí es aplicar redes inalámbricas para lograr control realimentado en tiempo real comparable al control cableado punto a punto [8]. Los dos principales problemas de las redes inalámbricas utilizadas para control en ambientes industriales son, la poca fiabilidad del medio de trasmisión causada por el comportamiento no determinístico especialmente en IEEE802.11 que utiliza CSMA/CA como protocolo de acceso al medio, y los altos retardos causados por interferencia y la trayectoria multicaminos [9].
A pesar de los problemas que poseen las redes inalámbricas WiFi, en la actualidad se sigue investigando para aplicaciones industriales por tres razones fundamentales. La primera es que aunque IEEE802.15 ofrece mejores técnicas en ahorro de energía y mejores resultados en cuanto a fiabilidad, es menos robusto a la interferencia y al ruido que el IEEE802.11 [10]. Segundo, aunque hay aplicaciones industriales con menos de 10 nodos trasmitiendo datos por debajo de los 80 bytes, también hay aplicaciones que utilizan cientos de nodos transmitiendo por encima de 80 bytes, para estas el IEEE802.15.4 presenta problemas [11]. Y tercero es el posicionamiento en el mercado de dispositivos inalámbricos diseñados para ambientes industriales como los SCALANCE W744-1Pro y W788-1Pro de Siemens, ambos trabajando con el protocolo IEEE802.11.
De igual forma, existe la necesidad de caracterizar y evaluar el comportamiento de estos dispositivos inalámbricos diseñados especialmente para ambientes industriales [12], esto permite determinar si se cumple con los estándares especificados por el fabricante. Un objetivo de Industrial Ethernet es extender sus aplicaciones hasta la base de la pirámide de automatización para comunicar procesos de control en tiempo real bajo condiciones extremas teniendo en cuenta que, dependiendo de la aplicación, la mayoría de los procesos de control industrial pueden tolerar latencias entre 10 - 50 ms [13].
En este artículo se hace una comparación experimental entre el desempeño de una red inalámbrica y una red industrial inalámbrica para procesos de control en tiempo real bajo ambientes industriales, evaluando 4 parámetros que son: distancia, tamaño de datos, relación señal a ruido (SNR) y PER (Packet Error Rate). El artículo se presenta de la siguiente forma: en la sección dos se presenta la metodología, en la sección tres los resultados y discusiones, y en la sección cuatro las conclusiones.
2. Metodología
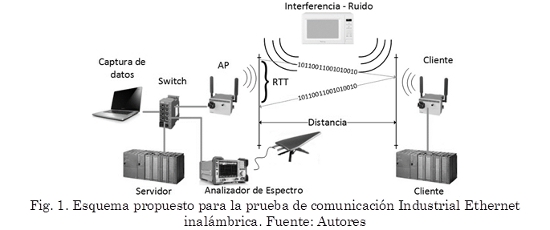
En la Fig. 1 se muestra el esquema propuesto para evaluar el desempeño de un sistema de comunicación con industrial Ethernet bajo ambientes industriales. Para la comunicación con Ethernet convencional basta sustituir los dispositivos empleados en industrial Ethernet, incluyendo los cables usados para comunicar los puntos de acceso (AP) con el switch.
En este artículo se pondrá a prueba la comunicación variando tres parámetros que afectan considerablemente su desempeño.
2.1 Relación señal a ruido SNR
El SNR se define como (1):

En la cual Ps es la potencia de la señal (Watts) y Pn la potencia del ruido (Watts). La SNR se debe tener en cuenta a la hora de establecer una comunicación inalámbrica ya que afecta considerablemente su desempeño, sobre todo en ambientes industriales donde el nivel de potencia del ruido es grande. Para medir el SNR se usó el analizador de espectro Rohde & Schwarz FSH3 que tiene un ancho de banda de 3 GHz, y como transductor una antena directiva de banda ancha HyperLOG 7060 (700 MHz - 6 GHz) con ganancia de 5 dBi. Para adaptar el transductor al analizador se editó la librería de esta con la tabla de datos del factor de antena suministrados por el fabricante. Este factor tiene unidades de μV/m, por lo tanto todas las medidas realizadas con el analizador fueron en unidades de campo eléctrico. En la Fig. 2a se muestra un ejemplo de las mediciones hechas para IEEE 802.11g sin el ruido introducido con un microondas, la Fig. 2b muestra cómo el nivel del ruido se incrementa con el horno microondas.
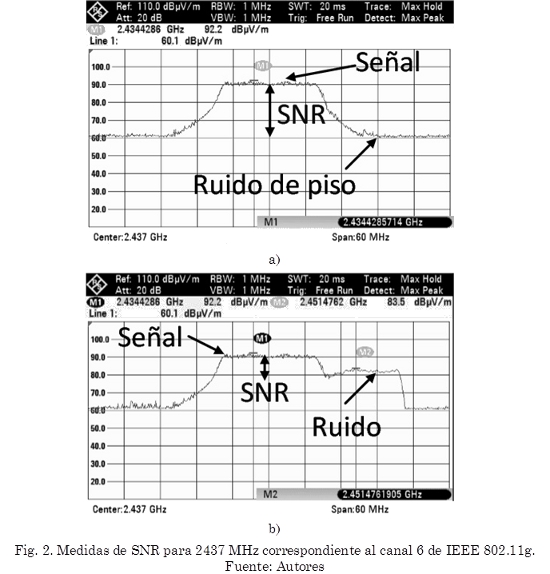
El nivel de campo eléctrico de la señal se toma como el pico máximo identificado por el marcador M1, y el nivel de campo eléctrico del ruido se tomó como valor mínimo o ruido de piso identificado por la línea 1 o el marcador M2.
Para variar el SNR en el experimento y emular los ambientes industriales, se usa un horno microondas que fue implementado como una gran fuente de perturbación para redes inalámbricas [14]. En una prueba inicial, se dejó encendido el microondas con una carga de agua durante 3 minutos, la intensidad de campo, el ancho de banda y la frecuencia central del ruido emitido fue de -57,5 dBm, 60 MHz y 2439 MHz, respectivamente. Para el experimento con el radio enlace funcionando se tomaron tres medidas; la primera con el microondas apagado; la segunda con el microondas encendido durante 3 minutos y a una distancia de 100 cm del servidor; y la tercera, igual que la anterior, pero con una distancia al servidor de 20 cm. Con esto se obtuvieron SNR promedio de 29,54 dBm, 10,985 dBm y 0,66 dBm, respectivamente, con un número total de 108 mediciones.
2.2 Distancia
La distancia está directamente relacionada con el desvanecimiento de la señal y los problemas por trayectoria multicamino que en definitiva afectan la calidad de la transmisión de acuerdo con (2) y (3):
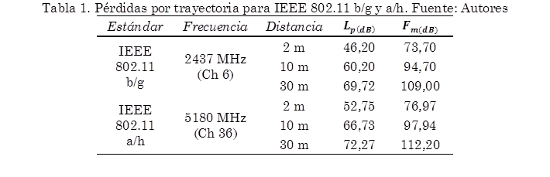
Donde Lp(dB) son las pérdidas en la trayectoria en espacio libre, Fm(dB) es el margen de desvanecimiento, c la velocidad de la luz en el vacío, D la distancia en metros, f la frecuencia en Hertz, A el factor de aspereza del terreno, B el factor climático y R la confiabilidad. Para el experimento se hicieron pruebas para distancias de 2, 10 y 30 metros, teniendo en cuenta las recomendaciones de Industrial Ethernet de poner lo más cerca posible los dispositivos de la red. En la Tabla 1 se muestran las Lp(dB) y el Fm(dB) para las distancias tomadas, donde se observa cómo las pérdidas aumentan con la distancia.
2.3 Número de bytes
Otro parámetro a evaluar será el número de bytes de datos enviados del PLC servidor al PLC cliente. Se debe tener en cuenta que en el piso de la pirámide de automatización, el número de bytes de datos es pequeño y dependiendo del número de dispositivos conectados, el flujo de información puede ser alto. Para la prueba se enviaron paquetes de datos de 8, 32 y 64 bytes. Otro parámetro que está relacionado con el número de bytes y que se usó para el análisis de resultados es el PER que está relacionado con la interferencia, la potencia de transmisión, el tipo de modulación y el ancho de banda [15], se define con (4):

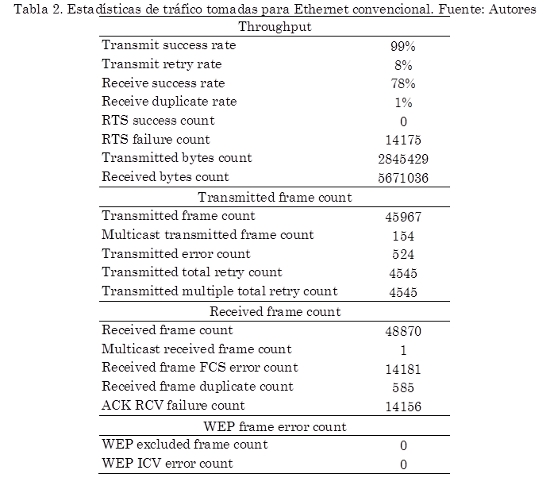
Donde p es la probabilidad de error, n el número total de paquetes y pk la probabilidad de error de k paquetes. La Tabla 2 muestra las estadísticas de tráfico para la comunicación Ethernet convencional tomada del AP D-Link, en este caso, el PER se encuentra con (5):

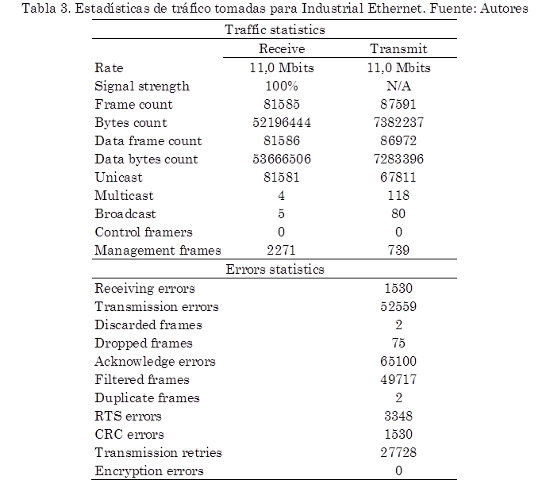
En la Tabla 3 están las estadísticas de tráfico obtenidas de Industrial Ethernet tomadas del AP Scalance W788-1 Pro, el PER se encuentra con (6):

2.4 RTT (Roud Trip delay Time)
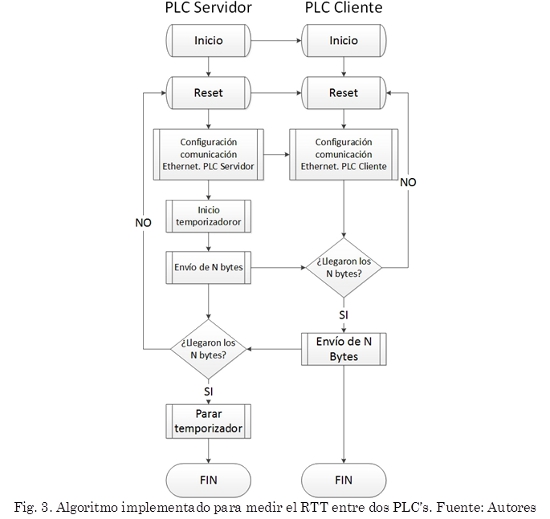
Para el control en tiempo real es fundamental conocer el retardo ocasionado por el medio de trasmisión, ya que a partir de este se puede determinar, de acuerdo con la planta, si permite obtener la respuesta deseada establecida por el controlador, además se debe tener en cuenta en el diseño de este. Es por esto que una de las métricas más relevantes para medir el desempeño de una red utilizada para control en tiempo real es el retraso que sufren los datos. El término relacionado para esta medida es el retardo RTT (tiempo de ida y retorno) que es definido como el tiempo que transcurre mientras se envía un paquete y se recibe el reconocimiento (ACK), y es usado para establecer la velocidad de conexión en tiempo real entre dos hosts [16]. En la Fig. 3 se presenta el algoritmo implementado en los PLC’s para medir el retardo al variar el número (N) de bytes de datos.
2.5 Pruebas en un proceso de control en tiempo real
Por último, para evaluar el desempeño de los dos sistemas de comunicación en un proceso de control en tiempo real, se usó el experimento que se muestra en la Fig. 4.
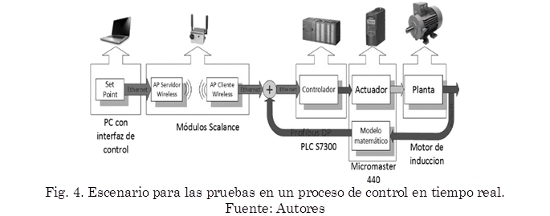
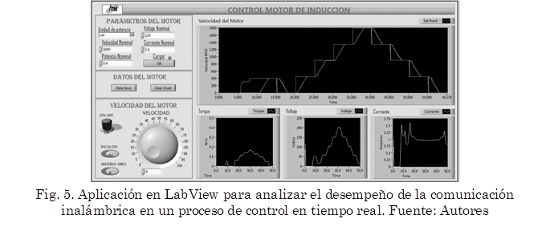
En el PC se diseñó una interfaz de control que cuenta con 4 características (ver Fig. 5); la primera para cargar los parámetros del motor en el variador (Micromaster 440); la segunda para guardar los datos obtenidos en un archivo de texto; la tercera para enviar parámetros de control al motor; y la cuarta para mostrar las gráficas de respuesta del motor. Para la prueba se envía por red inalámbrica el valor deseado en el motor y se lee la respuesta de este para medir el tiempo que tarda el motor en llegar al valor deseado variando el SNR.
2.6 Características de los dispositivos empleados en el experimento
De los equipos usados, los que determinarán sustancialmente el desempeño de la red son los AP’s ya que permiten configurar, administrar y supervisar la red. Por esta razón, a continuación se describen las características más importantes de los AP’s de Ethernet industrial y convencional, de tal forma que se pueda hacer una comparación sobre algunos parámetros importante en ambiente industriales.
2.6.1 Scalance W788-1 PRO y W744-1 PRO
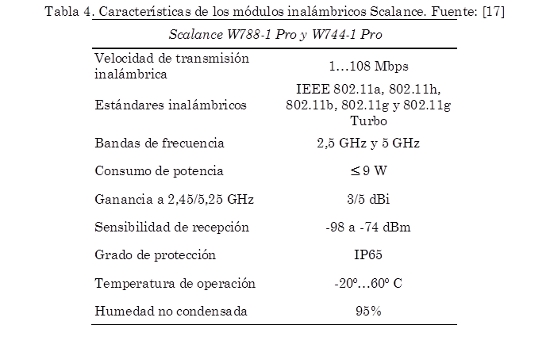
El módulo W788-1 pro actúa como AP y el módulo W744-1 pro se conecta al AP como cliente. Con estos es posible conectar estaciones fijas o móviles con conexión Industrial Ethernet que deban ser integradas en las redes de radiotransmisión Industrial Wireless Lan (IWLAN), con un alto grado de fiabilidad en las comunicaciones [17]. En la Tabla 4 se pueden observar las principales características de estos módulos inalámbricos para Industrial Ethernet.
2.6.2 D-LINK DWL-8600 AP
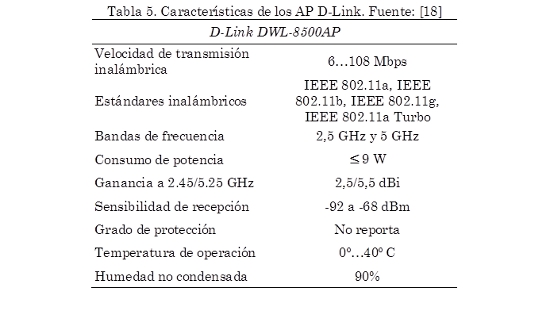
Este punto de acceso, diseñado para su instalación en interiores, ofrece opciones seguras para que los administradores de red desarrollen una red inalámbrica sumamente robusta y muy gestionable [18]. En la Tabla 5 se especifican las principales características de estos AP.
3. Resultados y discusión
Los resultados se clasifican de acuerdo con los parámetros variados que son: número de datos, distancia y SNR. Para mostrar los datos obtenidos se usaron gráficas boxplots, ya que muestran variables estadísticas de interés como la media, la dispersión de los datos, los máximos y mínimos. Con esta metodología se tomaron 720 mediciones calculadas así: dos variaciones de SNR (29,54 y 0,66 dBm), tres variaciones de distancia (2, 10 y 30 m), tres variaciones en el tamaño de bytes (8, 32 y 64 bytes), cuatro protocolos (802.11g y gT para ambas redes), y diez medidas por cada variación con lo que se obtuvieron 720 mediciones del RTT.
3.1 Número de datos
En la Fig. 6 se presenta el boxplot variando el número de bytes para una SNR=29,54 dBm entre la red inalámbrica con elementos de Industrial Ethernet y el convencional. Se observa que si aumenta el tamaño de datos enviados, el RTT aumenta. Además, para 802.11g hay una mayor dispersión de retardos que para 802.11gT, en cuanto a Industrial Ethernet. En el Ethernet convencional se puede ver que la diferencia en cuanto a retardos es pequeña, para el primero se tiene un RTT promedio de 14 a 18 ms y para el segundo desde 14 a 20 ms, ambos en 802.11g.
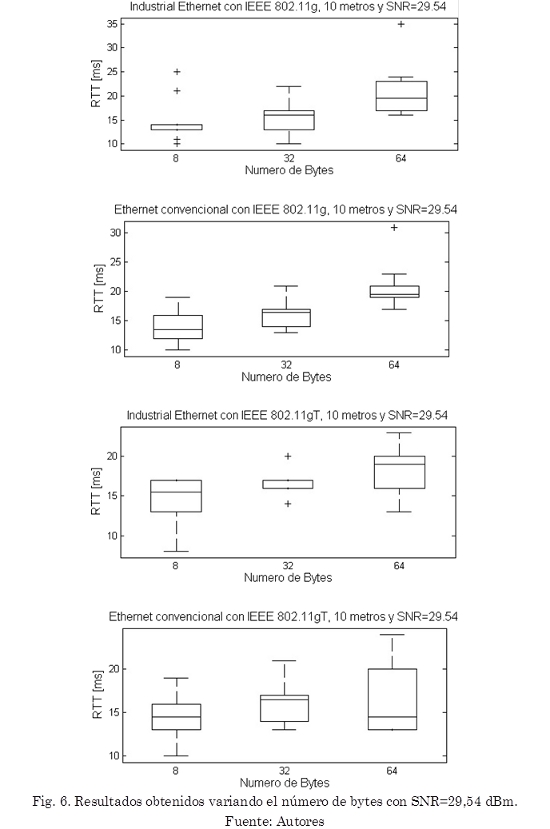
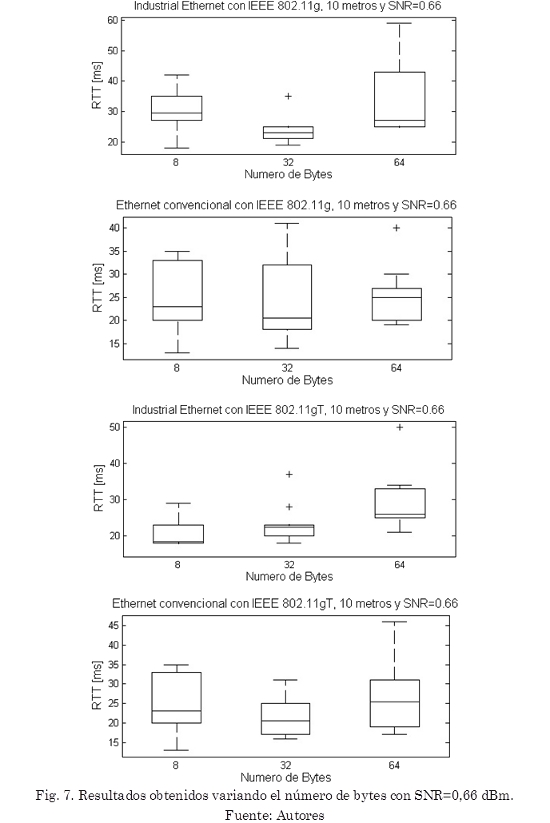
En la Fig. 7 se aprecia que cuando disminuye el SNR, el RTT promedio aumenta. Para Industrial Ethernet los RTT promedio van de 19 a 29 ms y para Ethernet convencional de 20 a 25 ms. Para 802.11gT de Industrial Ethernet se observan muy buenos resultados comparado con 802.11g, el promedio RTT pasa de 19 ms (64 bytes) sin ruido a 24 ms (64 bytes) con SNR=0,66 dBm y baja dispersión de los cuartiles Q1 a Q3 que conforman el 50% de los datos.
3.2 Distancia
A continuación se muestran los resultados variando la distancia con 802.11g y gT, 64 bytes de datos y SNR=29,54 dBm. En la Fig. 8 se observa que en la medida que aumenta la distancia, aumenta el RTT. Por ejemplo, para 802.11g con Industrial Ethernet, se pasa de 18 ms (2 m) a 24 ms (30 m) y para Ethernet convencional de 17 ms (2 m) a 23 ms (30 m).
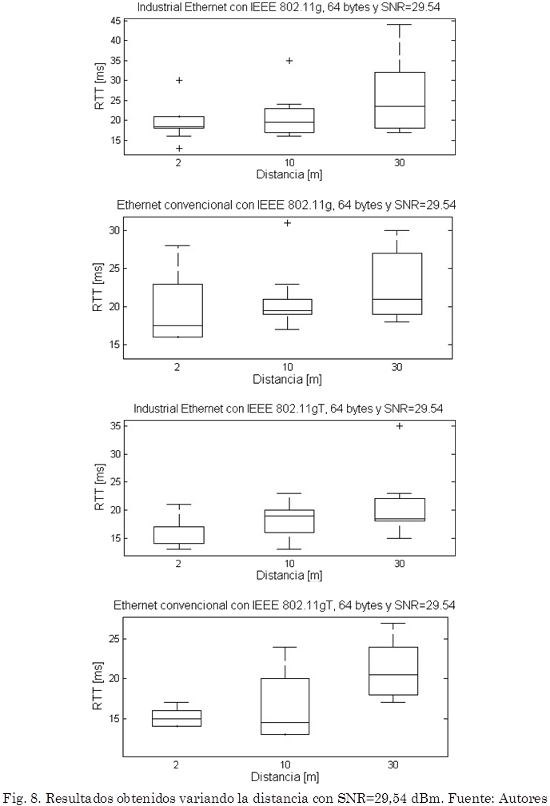
En este último se obtuvieron menores RTT que para el Industrial Ethernet, excepto en 802.11gT que muestra una media y una dispersión menor que el convencional. La Fig. 9 presenta los resultados con SNR promedio de 0,66 dBm. Estos evidencian un aumento del RTT medio con respecto a los tomados para SNR de 29,54 dBm.
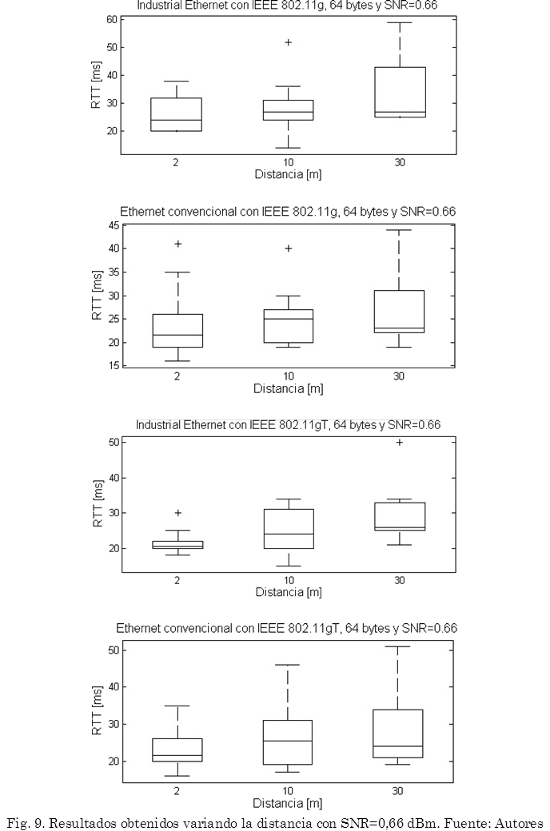
Por ejemplo, se pasó de 18 a 24 ms con 802.11g en Industrial Ethernet y de 17 a 23 ms en Ethernet convencional con 802.11g, además se ve un menor RTT en 802.11 gT que en 802.11g para ambos casos.
3.3 PER
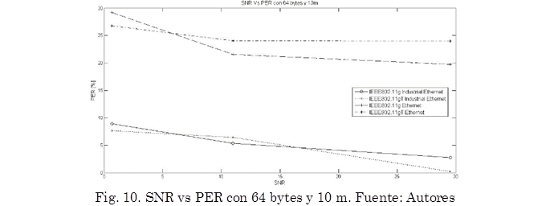
En la Fig. 10 se presentan los resultados obtenidos para el PER en función de SNR. Se observa una gran diferencian entre el Ethernet convencional y el Industrial Ethernet, ya que para el primero el PER va de 29 a 20%, y para el segundo va de 9 a 0,5% mostrando un mejor resultado el Industrial Ethernet para IEEE 802.11gT.
3.4 Resultados en un proceso de control en tiempo real
Para el proceso de control en tiempo real, se tomaron ocho medidas con dos SNR para los protocolos 802.11g y gT a una distancia entre los AP de 30 metros. En la Tabla 6 se muestran los promedios de las ocho medidas de tiempo que tarda el motor en llegar al valor deseado una vez se envía el Set Point.
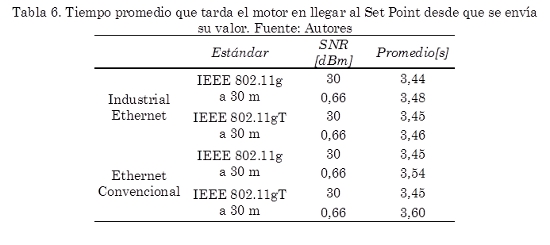
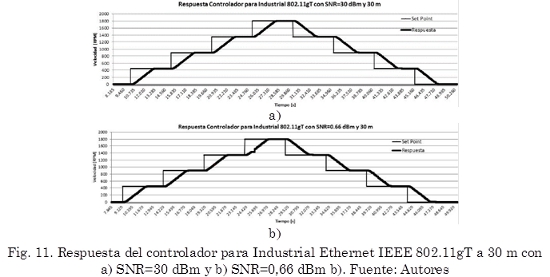
Estos resultados muestran que los promedios aumentan cuando decrece la SNR. Nuevamente, se observa el buen desempeño de Industrial Ethernet con 802.11 gT ante el ruido, que comparado con 802.11 g, tiene un promedio de tiempo 24,38 ms menor. En la Fig. 11 se observa que la respuesta del protocolo variando el SNR es casi la misma.
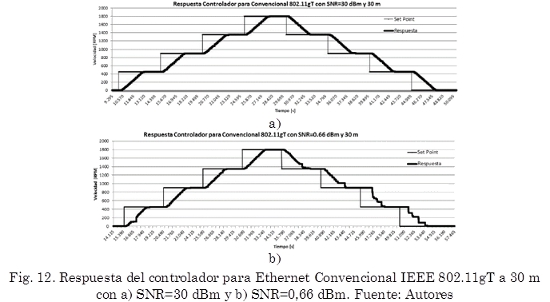
Caso contrario ocurre con el Ethernet convencional, donde IEEE 802.11gT muestra los peores resultados ante el ruido, con un tiempo 147,5 ms por encima del que no tiene ruido. En la Fig. 12 se evidencian estos resultados.
4. Conclusiones
El uso creciente de las redes Ethernet en el piso de la pirámide de automatización ha hecho que muchas compañías desarrollen dispositivos para operar bajo los requerimientos característicos de este nivel, en la actualidad denominada red Industrial Ethernet. Muchos de estos equipos se venden a muy alto costo, por eso en este artículo se evaluó el desempeño de dos redes inalámbricas, una con dispositivos del Ethernet convencional, y otra con dispositivos de Industrial Ethernet. En primera instancia, analizando las Tablas 4 y 5 se pueden observar algunas diferencias a favor de los AP Scalance de Siemens: un mayor número de protocolos de comunicación que permitiría, de acuerdo con los niveles y frecuencias de interferencia, seleccionar el más adecuado entre un mayor número de posibilidades que el D-Link; menor sensibilidad de recepción (-96 dBm contra -92 dBm de D-Link) que permite lograr un mayor alcance en la comunicación, aunque se recomienda instalar los AP lo más cercano posible; y por ultimo Scalance tiene un mayor grado de protección reflejado en mayor temperatura y humedad de operación con rangos desde los -20 a 60Cº y 95%, respectivamente.
Respecto al número de datos se puede observar de las Fig. 6 y 7 resultados muy similares entre Industrial Ethernet y el Ethernet convencional, con variaciones promedio en RTT de algunos milisegundos. También es claro que a mayor número de bytes mayor es el RTT. Con el parámetro distancia, de las Fig. 8 y 9, se puede establecer una conclusión similar a la anterior. Para la SNR se puede observar un buen desempeño de ambos equipos, incluso con una SNR de 0,66 dBm, donde el nivel de potencia del ruido en el emisor es casi igual al nivel de potencia de la señal transmitida.
Observando las Fig. 8 y 9 se ve claramente cómo el RTT aumenta en la medida que aumenta el nivel del ruido, por eso es importante hacer mediciones de nivel de ruido y potencia en la planta para determinar que banda (2,4 o 5 GHz) y qué protocolo es el más indicado para un buen desempeño. De la Fig. 10 se observa cómo el PER aumenta cuando la SNR disminuye ocasionando mayores retardos en la comunicación. En este aspecto los módulos de Industrial Ethernet muestran un mejor desempeño que los convencionales. En la mayor parte de las pruebas, el protocolo con mejores resultados fue 802.11gT para Industrial Ethernet, por eso se recomienda establecerlo como protocolo de comunicación para aplicaciones de control en el piso de la pirámide.
Por último, se puede concluir que bajo los parámetros y condiciones evaluados, las redes inalámbricas pueden servir como sistema de comunicación en aplicaciones de control con retardos permisibles de hasta 50 ms, además, los resultados muestran un mejor desempeño de las redes Industrial Ethernet con respecto a las convencionales con diferencias en los RTT de milisegundos. Por lo tanto, se recomienda establecer qué riesgo representa para el proceso a controlar estos retardos y así determinar si los equipos convencionales aplican. Igualmente, se deben tener en cuenta las condiciones de humedad y temperatura ya que pueden afectar el correcto funcionamiento de los dispositivos.
Del análisis de los resultados, se puede sugerir que en aplicaciones donde los retardos no sean críticos para el proceso, y luego de un análisis técnico-económico, es factible utilizar comunicaciones inalámbricas convencionales en lugar de las industriales para disminuir costos sin sacrificar la calidad del servicio. Como trabajo futuro se podría ampliar la investigación teniendo en cuenta parámetros relacionados con el flujo continuo de datos, con una red compuesta de múltiples nodos.
Referencias
[1] J. H. Taylor, J. Akerberg, H. M. S. Ibrahim, and M. Gidlund, “Safe and secure wireless networked control systems,” in 2012 IEEE International Conference on Control Applications, 2012, pp. 871-878. [ Links ]
[2] B. K. Chejerla and S. Madria, “Securing a Wireless Networked Control System Using Information Fusion,” in 2012 IEEE 31st Symposium on Reliable Distributed Systems, 2012, pp. 475-476. [ Links ]
[3] S. X. Ding, P. Zhang, S. Yin, and E. L. Ding, “An Integrated Design Framework of Fault-Tolerant Wireless Networked Control Systems for Industrial Automatic Control Applications,” IEEE Trans. Ind. Informatics, vol. 9, no. 1, pp. 462-471, Feb. 2013. [ Links ]
[4] J. Song, A. Mok, D. Chen, and M. Nixon, “Challenges of wireless control in process industry,” in Workshop on Research Directions for Security and Networking in Critical Real-Time and Embedded Systems, 2006. [ Links ]
[5] G. W. Irwin, J. Colandairaj, and W. G. Scanlon, “An Overview of Wireless Networks in Control and Monitoring,” in Computational Intelligence, vol. 4114, D.-S. Huang, K. Li, and G. W. Irwin, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2006, pp. 1061-1072. [ Links ]
[6] S. Savazzi, S. Guardiano, and U. Spagnolini, “Wireless critical process control in oil and gas refinery plants,” in 2012 IEEE International Conference on Industrial Technology, 2012, pp. 1003-1008. [ Links ]
[7] M. Li, P. Zeng, F. Zhang, H. Wang, and R. Zhong, “Structure and protocols of wireless industrial control network,” in 2010 International Conference on Computer Application and System Modeling (ICCASM 2010), 2010, pp. V6-140-V6-143. [ Links ]
[8] C. Cheng, P. Hsiao, H. Kung, and D. Vlah, “Performance Measurement of 802.11a Wireless Links from UAV to Ground Nodes with Various Antenna Orientations,” in Proceedings of 15th International Conference on Computer Communications and Networks, 2006, pp. 303-308. [ Links ]
[9] M. Collotta, L. Lo Bello, E. Toscano, and O. Mirabella, “Dynamic load balancing techniques for flexible wireless industrial networks,” in IECON 2010 - 36th Annual Conference on IEEE Industrial Electronics Society, 2010, pp. 1329-1334. [ Links ]
[10] U. H. S. Asrar and D. A.-M. Yousuf, “On the design of a wireless network in an industrial environment,” in 2010 IEEE International Conference on Communication Systems, 2010, pp. 756-760. [ Links ]
[11] K. Kunert, E. Uhlemann, and M. Jonsson, “Enhancing reliability in IEEE 802.11 based real-time networks through transport layer retransmissions,” in International Symposium on Industrial Embedded System (SIES), 2010, pp. 146-155. [ Links ]
[12] L. Seno, S. Vitturi, and F. Tramarin, “Influence of real components behavior on the performance of wireless industrial communication systems,” in 2011 IEEE International Symposium on Industrial Electronics, 2011, pp. 1224-1229. [ Links ]
[13] C. Rojas and P. Morell, “Guidelines for Industrial Ethernet infrastructure implementation: A control engineer's guide,” in 2010 IEEE-IAS/PCA 52nd Cement Industry Technical Conference, 2010, pp. 1-18. [ Links ]
[14] V. Lucan, P. Simacek, J. Seppälä, and H. Koivisto, “Bluetooth and Wireless LAN Applicability for Real-Time Control,” in Automaatio2003, 2003. [ Links ]
[15] M. Islam, M. A. Hannan, S. A. Samad, and A. Hussain, “Bit-Error-Rate (BER) for modulation technique using Software defined Radio,” in 2009 International Conference on Electrical Engineering and Informatics, 2009, pp. 445-447. [ Links ]
[16] R. C. Lozoya Gámez, P. Martí, M. Velasco, and J. M. Fuertes, “Wireless Network Delay Estimation for Time-Sensitive Applications,” 2006. [ Links ]
[17] Siemens, “Siemens SCALANCE-W788_Manual.” p. 142, 2005. [ Links ]
[18] D-Link Corporation, “Unified Access Point (AP) Administrator's Guide.” p. 183, 2008. [ Links ]
