











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. Introducción
La ecuación del péndulo forzado juega un papel muy importante en el desarrollo del análisis cualitativo de ecuaciones diferenciales no lineales, pues surge en forma natural en varias aplicaciones de ingeniería, ver [1,2] y por- que es un paradigma en la teoría del caos [3]. Una recopilación actualizada de resultados globales y algunos datos históricos se puede consultar en [4].
Más concretamente nuestro interés se centra en la ecuación del péndulo forzado de la forma:

donde b, a son constantes positivas y c es una constante no negativa, que se conoce como la ecuación de Tricomi, debido a los trabajos que él hizo sobre la sincronización de motores eléctricos [5,6]. Un cálculo sencillo muestra que (1) tiene dos, una o ninguna solución de equilibrio dependiendo si b < a, b = a o b > a respectivamente. Además, cuando b > a no existen órbitas heteroclinas, sin embargo, existe una solución periódica de segunda clase, es decir, una solución de la forma x(t) = ±t + ϕ(t) donde ϕ es una función 2π-periódica, estas soluciones también son conocidas como rotaciones. En los artículos [7,8] se estudia la existencia y estabilidad de rotaciones. De otro lado, si b ≤ a, existe c 0(a, b) > 0 tal que si c > c 0(a, b) entonces (1) tiene dos órbitas heteroclinas pero no rotaciones, mientras que si c ≤ c 0(a, b) (1) tiene una rotación y una órbita heteroclina. Estimar c 0(a, b) es un problema muy importante y delicado como los siguieren los trabajos [9,10].
La generalización de la ecuación (1) que se estudiará, y que en adelante se llamará la φ−ecuación de Tricomi, es:

donde a > 0 , c, b ≥ 0, I, J son intervalos en R, 0 ∈ I, φ: I −→ J un difeomorfismo creciente tal que φ(0) = 0. La ecuación (2) aparece en varios contextos: en flujos relativistas con la ecuación de Klein-Gordon no lineal amortiguada [11],
cuando  , en procesamiento de señales [12], cuando φ(y) = |y|yp−1 con p > 1 o en modelos de epidemióloga con retraso [13], entre otras. En particular, son de interés los siguientes tipos de operadores:
, en procesamiento de señales [12], cuando φ(y) = |y|yp−1 con p > 1 o en modelos de epidemióloga con retraso [13], entre otras. En particular, son de interés los siguientes tipos de operadores:
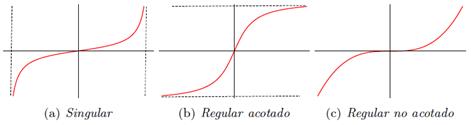
φ(y) es singular, es decir, I = (y1, y2), donde y1 < 0 < y2 y l´ımy→yi φ(y) = ±∞, i = 1, 2.
φ(y) es regular no acotado, es decir I = R y l´ımy→±∞ φ(y) = ±∞.
φ(y) es regular acotado, es decir I = R y l´ımy→±∞ φ(y) ∈ R±.
La existencia de soluciones periódicas de ecuaciones del tipo φ-laplaciano, con φ singular, regular acotado o regular no acotado, ha sido ampliamente estudiada por varios autores, por ejemplo [14-19]. Sin embargo, es menos frecuente estimar en forma analítica cuencas atractivas o determinar la existencia de soluciones periódicas de segunda clase, ver [4,20]. Motivados por este hecho se presentan dos resultados principales asociados a (2) con disipación: el Teorema 3.2 en donde se estima en forma analítica la cuenca de atracción de una solución de equilibrio siempre que b < a, con ayuda del principio de invarianza de Lasalle, y por otro lado, el Teorema 3.4 en donde se demuestra la existencia y estabilidad asintótica de una única solución periódica de segunda clase, cuando b > a.
Otros resultados notables son: el Teorema 2.2, que muestra la no existencia de rotaciones en el caso conservativo no homogéneo, la clasificación de la solución de equilibrio degenerada siempre que a = b, Teoremas 2.3 y 3.3, en el caso conservativo y disipativo, respectivamente. Finalmente, en el caso conservativo y b < a, el Teorema 2.1 garantiza la existencia de la función periodo, asociada a φ, cuya imagen es un subconjunto no acotado de R. Es de anotar que en el Teorema 2.1 se establece la hipótesis (H) con la finalidad de asegurar la existencia de las dos órbitas homoclinas en función de φ y este hecho juega un papel muy importante a la hora de demostrar los Teoremas 3.2 y 3.4. Obsérvese que la hipótesis (H) se cumple en forma natural cuando φ es regular no acotada como sucede en (1), pero cuando φ es regular acotada la hipótesis (H) se hace necesaria como ilustra el Ejemplo 2.1. Una expresión similar a (5), fue obtenida en [21] para otro tipo de ecuaciones con φ-laplaciano.
El artículo está estructurado de la siguiente forma: después de la introducción, en la sección 2 se estudia el caso conservativo donde se hace un análisis cualitativo de la ecuación (2) estableciendo una clasificación, en términos de los parámetros a, b, de las posibles dinámicas del sistema y finalmente, en la sección 3, se estudia el caso disipativo y se demuestran los resultados principales.
2. Caso conservativo
En esta sección se considera el caso conservativo, es decir, cuando en (2) no hay disipación. La ecuación (2) se puede reescribir como:
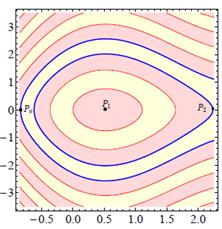
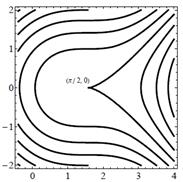
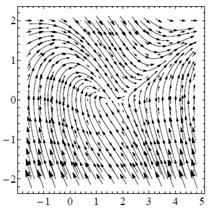
Figura 2: Curvas de nivel de la energía E(x, y) cuando b < a. En azul curva de nivel E(x, y) = F (q) − F (π − q) asociada a la homoclina.

 Donde
Dondey el hamiltoniano asociado es H(x, y) = F (x) + tt(y). Ahora, como ocurre en el caso newtoniano si b < a entonces (3) tiene dos soluciones de equilibrio geométricamente diferentes que están dadas por:
p1 = (q, 0), p2 = (π − q, 0), q = arcsen(b/a)
donde p1 es un centro no lineal y p0 = (−π − q), p2 son sillas, ver Figura 2. Si b ≥ a entonces (3) tiene o bien un único punto crítico cúspide,  , cuando b = a o no tiene puntos críticos ni rotaciones cuando b > a
, cuando b = a o no tiene puntos críticos ni rotaciones cuando b > a
2.1 Función periodo y no existencia de rotaciones (b < a)
Con la idea de establecer propiedades de la función periodo y clasificar los diferentes tipos de soluciones periódicas en el cilindro C = S 1 × Im(φ), pasamos a definir la función energía:

Entonces la órbita que pasa por (l, 0) con q < x(0) = l < π − q, es una curva de Jordan que rodea a p 1 y corresponde a la solución periódica de (3) y se llaman libración en C. Más aún l es la amplitud máxima de solución periódica de (3), mientras que m l es la amplitud mínima, donde m l también es solución de E(x, 0) = F (q) − F (l) > 0, de otro lado, el valor máximo y mínimo de y debe satisfacer
G(y) = F (l) − F (q),
como G es una función no positiva que pasa por cero y monótona en los intervalos Im(φ) ∩ R+ y Im(φ) ∩ R−, tiene sentido denotar por
(G −1(m))± = {y ∈ Im(φ) ∩ R±: G(y) = m}.
Así una condición necesaria y suficiente para la existencia de la órbita cerrada es que G −1(F (l) − F (q))− y G −1(F (l) − F (q))+ sean no vacías. Si

entonces para cada q < l < l ∗ la función periodo está dada por:

Usando la observaciones anteriores se presenta un resultado sobre algunas propiedades de la función periodo:
Teorema 2.1. Si φ satisface la hipótesis:
(H) Im(φ) ∩ G −1(F (π − q) − F (q))± ( ∅,
entonces la función periodo T a,b (l), definida en (5), satisface:
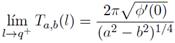
Nota 2.1. El límite de la izquierda dice que la función periodo se puede aproximar con el periodo de la linealización de (2) alrededor de p1, claramente no depende de la hipótesis (H), mientras que la existencia de la homoclina E(x, y) = F (q) − F (π − q) depende de φ. Así que cuando φ es o bien singular o regular no acotada, es decir, Im(φ) = R, se garantiza la existencia de la homoclina, pues la hipótesis (H) se satisface naturalmente, mientras que si φ es acotada regular o Im(φ) ( R, se debe imponer (H) para garantizar la existencia de la homoclina.
Ejemplo 2.1. Al considerar la función regular no acotada φ(y) = exp(y)−
1, se tiene Im(φ) =] − 1, ∞[ y

Además.  Tomando b/a << 1, entonces la homoclina no
Tomando b/a << 1, entonces la homoclina no
existe, pues Im(φ) ∩ G−1(F (π − q) − F (q))− = ∅, mientras si b/a ≈ 1, Im(φ) ∩ G−1(F (π − q) − F (q))− ƒ= ∅, lo que asegura la existencia de la homoclina, ver Figura 3.
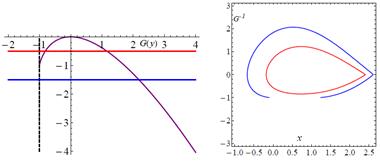
Figura 3: La función G definida en el ejemplo 2.1 (izquierda). Órbita homoclina asociada a E(x, y) = E(p2), en azul cuando b/a << 1 y en rojo cuando b/a ≈ 1 (derecha).
De otro lado, aunque las rotaciones también son curvas cerradas en el cilindro C no son homotópicamente equivalentes a las libraciones, debido a que las libraciones son homotópicamente equivalentes a un punto, mientras que las rotaciones no. Un cálculo sencillo muestra que (3) tiene rotaciones si se satisface la hipótesis (H) y b = 0.
Ahora, mostremos que si b ( 0 no existen rotaciones en el cilindro C.. Es suficiente mostrar que la variedad inestable asociada a p2 en el cilindro no está acotada. En efecto, bajo la hipótesis (H), se deben encontrar los elementos y ∈ Im(φ) tales que
E(p2 + (2πk, y)) = F (q) − F (π − q), k ∈ Z
que después de algunos cálculos, se llega a las siguientes ecuaciones
y =(G−1(∓2kπb))±, k ∈ N.
En cualquier caso y ∈ ∂Im(φ), lo que implica que la variedad inestable asociada a p2 no está acotada. Queda demostrado el siguiente teorema:
Teorema 2.2. El sistema (3) no tiene rotaciones cuando b ( 0 y φ satisface la hipótesis (H).
Teniendo en cuenta la observación 2.1, el Teorema 2.2 se satisface en particular si φ es o bien singular o regular no acotada.
Corolario 2.1. El sistema (3) no tiene rotaciones cuando b ( 0 y φ es o bien singular o acotada regular.
2.2 Casos b ≥ a
Como se dijo al inicio de esta sección, si a = b el hamiltoniano asociado a (3) tiene un único punto fijo que se denota por  cuya matriz jacobiana es:
cuya matriz jacobiana es:
 .
.Obsérvese que J(p4) no es idénticamente cero y tiene valores propios cero. Se usara [22], (Teorema 3, p. 151) para mostrar que p4 es un punto cúspide, ver Figura 4.
Teorema 2.3. Si φ es una función analítica en una vecindad de cero entonces  es una cúspide para (3) si a = b.
es una cúspide para (3) si a = b.
Prueba 2.1. Lo primero es escribir la serie de Taylor del sistema (3) alrededor de p 4:
Ahora usando el cambio de variable  y se tiene que la forma normal es:
y se tiene que la forma normal es:

Como la segunda ecuación de (6) es par entonces de [22](22, Teorema 3 p.151) se sigue que p 4 es un punto cúspide.
Finalmente, si b > a el sistema (3) no tiene soluciones periódicas, en efecto,
 , así el criterio de
, así el criterio de
Dulac garantiza la no existencia de soluciones periódicas.
3 Caso disipativo
El sistema asociado a la ecuación (2) es

y en esta sección se estudiará el sistema (7) en términos de los parámetros a, b. Si b < a, las soluciones de equilibrio p 0 y p 2 seguirán siendo sillas, como ocurre en el caso conservativo, mientras que p 1 pasará de ser un centro no lineal, en el caso conservativo, a un sumidero espiral.
Mientras que si b = a la solución de equilibrio p 4 es un nodo-silla, ver Figura 6, finalmente si b > a no existen soluciones de equilibrio pero sí existe una única rotación asintóticamente estable.
3.1 Cuenca de atracción (b < a)
Pasamos a estimar la cuenca atractiva para la solución de equilibrio p 1 del sistema (7), usando el principio de invarianza de Lasalle:
Teorema 3.1 (Principio de invarianza de Lasalle [3]). Supóngase u 0 una solución de equilibrio del sistema x′ = F(x), L: U → R una función de Lyapunov en u 0 , U un subconjunto abierto de R2 y Q un subconjunto cerrado, acotado contenido en U tal que u 0 ∈ Q. Entonces, si Q es positivamente invariante y no existen soluciones enteras en Q − {u 0} para las cuales L sea constante, entonces u 0 es asintóticamente estable y Q está contenido en la cuenca de atracción de u 0 .
Ahora presentamos el primer resultado principal, Teorema 3.2, donde estimamos la cuenca atractiva de la solución de equilibrio p 1, como se ilustra en la Figura 5 cuando φ es regular acotada. Es conveniente un poco de notación antes de presentar la demostración, denotamos con m π−q al número real que satisface E(m π−q , 0) = F (q)−F (π −q) tal que −π −q < m π−q < q, donde E es la función de energía definida en (4).

Figura 5: Ilustración de la cuenca atractiva de p1 en el caso disipativo de la φ-ecuación de Tricomi y b < a.
Teorema 3.2. Si φ satisface la hipótesis (H) entonces la solución de equilibrio p 1 = (arcsen (b/a), 0) de(7)tiene al conjunto
Q = {(x, y) : E(x, y) < E(m π−q , 0), m π−q < x < π − q}
como cuenca de atracción.
Prueba 3.1. Se demostrará primero que E es una función de Lyapunov, en efecto,
E(p 1) = 0 y
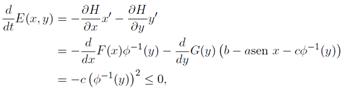
y además E(x, y) es positiva en Q−{p 1}. Ahora, para estimar la cuenca de atracción asociada a p 1 tómese r tal que 0 < r < E(m π−q , 0) y defina:

Entonces p 1 ∈ Q r para todo 0 < r < F (q) − F (π − q).
Q
r
es positivamente invariante: en efecto, supóngase que  es solución de (7) tal que x(0), y(0) ∈ Q
r
. Si x(t) ≥ π − q o m
π−q
≤ x(t), entonces deben existir
es solución de (7) tal que x(0), y(0) ∈ Q
r
. Si x(t) ≥ π − q o m
π−q
≤ x(t), entonces deben existir
t 0 , t 1 ∈ R tal que x(t 0) = π − q o x(t 1) = m π−q , en consecuencia, para i = 0, 1 se tiene:

la última desigualdad se obtiene debido a que la función G(y) es no positiva para y ∈ Im(φ). Sin embargo, E(x(0), y(0)) ≤ r < E(m
π−q
, 0) y  para todo (x, y) ∈ Qr lo que contradice la existencia de t0 o t1. Por consiguiente Qr es positivamente invariante.
para todo (x, y) ∈ Qr lo que contradice la existencia de t0 o t1. Por consiguiente Qr es positivamente invariante.
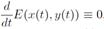 En Qr solo hay una solución entera: si existiera una solución entera (x(t), y(t)) diferente de p1 en Qr entonces
En Qr solo hay una solución entera: si existiera una solución entera (x(t), y(t)) diferente de p1 en Qr entonces
lo que implica φ−1(y(t)) = 0, y de la hipótesis sobre φ se sigue que y(t) ≡ 0. De otro lado, la primera ecuación de (7) satisface x′ ≡ 0, lo que implica que x(t) es constante. Por consiguiente, de la construcción de Qr, se tiene que la solución entera debe ser p1.
Qr es cerrado: suponga que (x0, y0) ∈ Qr, entonces existe una sucesión
γi = (xi, yi) en Qr, tal que
lím γi = (x0, y0),
de la continuidad de E y del hecho que γi ∈ Qr se sigue

lo que implica que (x0, y0) ∈ Ql. Así se tiene que Qr cumple las condiciones del Teorema 3.1, Qr esta en la base de atracción de p1. Por consiguiente,
Q = ∪0<r<E(mπ−q ,0)Qr = {(x, y): E(x, y) ≤ r, mπ−q < x < π − q} .
3.2 Caso a ≤ b.
Con la ayuda de [22](Teorema 1 p 151) se demostrará que  es un
es un
punto silla-nodo, ver Figura 6.
Teorema 3.3.
Si φ es una función analítica en una vecindad de cero entonces es silla-nodo para(7)cuando a = b.
es silla-nodo para(7)cuando a = b.
Prueba 3.2. Otra vez siguiendo [22] (Teorema 1 p 151.), se reescribe (7) en la forma normal:

donde p(x, y) = φ −1(y), q(x, y) = a(1 − sen x) − cφ(y) − y, obsérvese que:

es solución de y + q(x, y) = 0. Ahora se define ψ(x) := p(x, π(x)) y al hacer la serie de Taylor alrededor de p 4, se tiene

como el primer término de (9) es par entonces de [22] (Teorema 1 p 151.), se concluye que p 4 es silla-nodo.

Finalmente se presenta el segundo resultado principal, Teorema 3.4, donde se establecen condiciones de existencia y unicidad de la solución periódica de segunda clase siempre que b > a.
Teorema 3.4.
Si b > a entonces el sistema(7)tiene una única solución periódica de segunda clase asintóticamente estable siempre que esté en el dominio de φ.
esté en el dominio de φ.
Prueba 3.3. Lo primero es definir la banda

donde  y
y
observar que la y-nulclinal de (7) está contenida en B, como se ilustra en la Figura 7. Ahora bien, el campo vectorial asociado a (7) en B tiene siempre primera componente positiva, mientras que la segunda componente es o bien positiva sobre (s, y 1) o bien negativa en (s, y 2) para −π −q < s < π −q.
Al denotar (x(t, y 0), y(t, y 0)) a la única solución de (7) cuya condición inicial es:
x(0, y 0) = −π − q, y(0, y 0) = y 0 ,
con y 0 ∈]y 1 , y 2[⊂ Im(φ) ∩ R+, entonces la trayectoria de la solución, en el tiempo t(y 0), tiene primera coordenada x(t(y 0), y 0) = π − q.
Existencia: Se define el operador continuo
P :]y 1 , y 2[→ R,P(y 0) := y(t(y 0), y 0), y 0 ∈]y 1 , y 2[,
y gracias a la dirección del flujo se tiene P(y 1) > y 1 y P(y 2) < y 2, en consecuencia, el teorema del valor medio garantiza la existencia de un y∗ ∈]y 1 , y 2[ tal que P(y∗) = y∗. Por lo tanto, (7) tiene al menos una rotación.
Unicidad: supongamos que existen dos soluciones de P(y) = y en ]y 1 , y 2[, que se denotarán con y L (x), y U (x) tales que y L (x) < y U (x). Si P(y) = y en ]y 1 , y 2[, entonces y(−π − q) = y(π − q) y usando la función de energía (4) se tiene

y como  entonces al reemplazar en (10) y simplificar se llega a que
entonces al reemplazar en (10) y simplificar se llega a que
del hecho que  , lo que implica
, lo que implica

lo cual es contradictorio. Por consiguiente, la solución periódica de segunda clase es única.
Estabilidad Asintótica: De los razonamientos anteriores y del Teorema de Poincaré-Bendixson se sigue que la rotación es asintóticamente estable en la banda B.

