










Services on Demand
Journal
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkTecciencia
Print version ISSN 1909-3667
Tecciencia vol.9 no.16 Bogotá Jan./June 2014
https://doi.org/10.18180/tecciencia.2014.16.7
DOI: http://dx.doi.org/10.18180/tecciencia.2014.16.7.
Identification and multivariable control in state space of a permanent magnet synchronous generator
Identificación y control multivariable en el estado espacio de un generador síncrono de imanes permanentes
Danna Lisseth Albarracín Ávila1, Jorge Iván Padilla Buritica2, Eduardo Giraldo Suárez3
1 Universidad Tecnológica de Pereira, Pereira, Colombia, egiraldos@utp.edu.co.
2 Escuela Colombiana de carreras industriales, Bogotá, Colombia, jpadillab@ecci.edu.co.
3 Universidad Tecnológica de Pereira, Pereira, Colombia, carlos.pena@usa.edu.co.
How to cite: Albarracin Avila, D., et al, Identification and multivariable control in state space of a permanent magnet synchronous generator, TECCIENCIA, Vol. 9 No. 16., 66-72, 2014, DOI: http://dx.doi.org/10.18180/tecciencia.2014.16.7.
Received: 09 April 2014 Accepted: 28 May 2014 Published: 30 July 2014
Abstract
In this paper, a scheme for online identification of multivariable systems (MIMO) and a linear state feedback control is considered. The identification algorithm takes into account the input/output behavior in order to obtain a linear state spaces model that describes adequately the system in discrete time. This representation is obtained by using an online identification method such as the projection algorithm. An optimal linear quadratic regulator is applied in discrete time, where the obtained state feedback control law minimizes the quadratic cost function to calculate the optimal gain matrix. The proposed methodology for identification and multivariable control is applied an evaluated in a wind turbine with a Permanent Magnet Synchronous Generator (PMSG).
Keywords: Control, identification, optimal gain, multivariable, linear model, feedback.
Resumen
En este trabajo, se considera un esquema de identificación en línea de sistemas multivariable (MIMO) y un control lineal por realimentación de estados. El algoritmo de identificación considera el comportamiento de entrada/salida con el fin de obtener un modelo de espacio de estados lineal que describe adecuadamente el sistema en tiempo discreto. Esta representación se obtiene mediante el uso de un método de identificación en línea, tales como el algoritmo de proyección. Un regulador lineal cuadrático óptimo se aplica en tiempo discreto, donde la ley de control por realimentación de estados obtenida, minimiza la función de costo cuadrática para calcular la matriz de ganancia óptima. Se aplica la metodología propuesta para la identificación y el control multivariable, en una turbina eólica con un generador síncrono de imanes permanentes (PMSG).
Palabras clave: Control, identificación, ganancia óptima, multivariable, modelo lineal, retroalimentación.
1. Introduction
With its abundant, inexhaustible potential, its increasingly competitive cost, and environmental advantage, wind energy is one of the best technologies available today to provide a sustainable supply to the world development. Now, the wind energy is an important sustainable energy resource and with this creates the need for increased power production from the wind in adverse conditions, when the wind turbine generator system is coupled to a power system [1]. Recent studies are focused on investigating the system behavior with internal disturbances and variable wind speed that affects the system [2], and other investigations proposing new techniques about the system identification and the control systems in the maximum extracting of energy of the whole system [3].
The systems that use the subspace identification methods (SIMs) have become quite popular in recent years. The SIMs objective is to estimate the state variables or the extended observability matrix directly from the input and output data [4]. The most influential methods are CVA (Canonical Variate Analysis [5]), MOESP (Multivariable Output Error State Space [6]) and N4SID (Numerical Subspace State-Space System Identification [6]). But exist other methods that used the Darma model to estimate the plant parameters in each time with past inputs/outputs values [7].
Linear system identified with SIMs, are suitable for the application of state space controllers. The investigations around the discrete linear quadratic regulator (DLQR) control are oriented to the convergence of control strategies for discrete-time linear systems in state space based on dynamic programming (DP) and the classical DLQR. The performance of the DP algorithms is evaluated for changes in control targets that are mapped in Q and R weighting matrices [8].
This paper is focused on the mathematical model of a wind generator where the behavior of its variables will be examined. So, a nonlinear multivariable system identification scheme is proposed, based on a linear state space representation to improve the performance of the wind turbine. Lastly, the system's closed loop response is evaluated with the optimal adaptive controllers and the parameters stated by using the identification schemes.
2. Model description
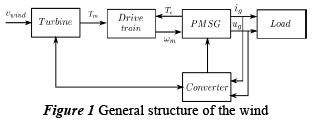
The model of a wind turbine with Permanent Magnet Synchronous Generator (PMSG) is constructed from a number of sub models of the turbine, drive train, synchronous generator and rotor side converter. A general structure of the model is shown in Figure 1 [9,13].
 .
.
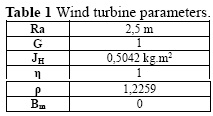
2.1 Turbine Model
The main purpose of the wind turbine is to obtain energy from the wind and transform it into electrical energy [9]. The power extracted from the wind is described by (1)
 .
.
Where, ρ is the air density, Ra is the radius of the area covered by the wind, v is the wind speed and Cp is the performance coefficient in function of the tip speed.
The torque developed from the wind and the Cp approximation is presented in (2) and (3).


A second order approximation, of the coefficient Cp, is calculated employing the least square technique.

The tip speed is (5)

The speed in the generator side is (6), where G is the multiplier coefficient of the gear box.

The torque in the generator side is:

Replacing equations (5) and (4) in (2), the torque in the generator side is represented by the approximation (8)
 .
.
3. Drive train system
Las figuras y tablas deben aparecer lo más cerca posible del lugar de su primera cita, por ejemplo, La figura. 1, en el texto. Las figuras se numerarán con números arábigos, con la leyenda centrada debajo de la figura, en negrita.
The drive train of PMSG consists of five parts, namely, rotor, low speed shaft, gearbox, high-speed shaft and generator. When the study focuses on the interaction between wind farms and AC grids, the drive train can be treated as one-lumped mass model for the sake of time efficiency and acceptable precision. So, the drive train takes the form of the latter one in the paper in which the parameters have been referred to the generator side [10].
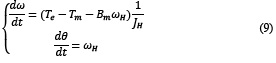
ωH the angular velocity, Te electrical torque, Tm mechanical torque, Bm is the rotating damping, JH is the inertia constant and θ the angular position angle.
4. Pmsg modeling
The PMSG has been considered as a system which makes possible to produce electricity from the mechanical energy obtained from the wind.
The dynamic model of the PMSG is derived from the two-phase synchronous reference frame, which the q-axis is 90° ahead of the d-axis with respect to the direction of rotation [1]. By the application of the Park transform and presenting the model as a generator with negative currents; the system is expressed in the coordinates of the rotor which makes the design of the driver simpler because their signals are treated as direct current and that reduces the model to two axes.
The system is modeled with the set of equations (10) to (13) where idq and udq represent currents and voltages of the stator in the axis q and d respectively [9].




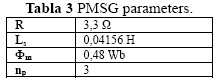
np is the number of pole pairs, R is the stator resistance, Ls is the inductance of the stator, φm the magnetization flow in the rotor.
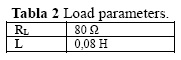
The system in state space is represented in (14) to (15) to feed a RL load, L is the inductance of the load, RL the variable resistance of the load, JH inertia coefficient at the side of the generator. The state vector is x=[x1,x2,x3]T=[id,iq,ω], the inputs of the systemu=[u1,u2]T=[RL,ν]T and the rotor speed ω is the output.




η is the drive train performance coefficient.
5. Subspace identification method
5.1. Representation of Multivariable Systems
The representation of a multi-variable discrete system with m outputs and r inputs with q as delay operator can be stated in [7]:

where A is given by:

and B is given by:

wint1 ≥n2h and where Ai∈ ,Bi∈
,Bi∈ ,the inputs u∈
,the inputs u∈ and the outputs y∈
and the outputs y∈ as
as

IfAo with I the identity matrix, y takes the form:

where Ai and Bi are of the form:
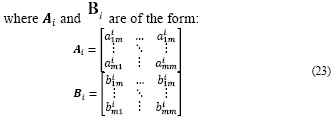
Equations (22) and (23) can be expressed the output yi in terms of past inputs/outputs as:
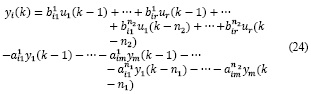
It appears from the above equation that the DARMA model of the equation (18) can be expressed as [11]:

where θT is transposed of θ, and θ has dimension (mn1+rn2) x m that holds the parameters of Ai and Bi of the form:

and Ø(K−1) is a vector of dimension (mn1+rn2) x 1 that holds the values of past input/output
An state space representation can be obtained from (22) and (27) by selecting Ø(K−1)as the state space vector, as follows:

being
and

and

The PMSG has been considered as a system which makes possible to produce electricity from the mechanical energy obtained from the wind. The PMSG has been considered as a system which makes possible to produce electricity from the mechanical energy obtained from the wind. The PMSG has been considered as a system which makes possible to produce electricity from the mechanical energy obtained from the wind. The PMSG has been considered as a system which makes possible to produce electricity from the mechanical energy obtained from the wind.
5.2. Online Estimation Schemes
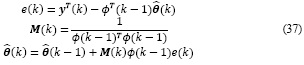
The estimated parameters  ̂T(K) are calculated in terms of the previous matrix of the estimated parameters ̂T(K−1) as follows
̂T(K) are calculated in terms of the previous matrix of the estimated parameters ̂T(K−1) as follows

where ̂T(K) is the matrix of parameters estimated in time k, M(K−1) denotes the algorithm gain (possibly a matrix), Ø(K−1) is a regression vector composed of past inputs/outputs, and e (K−1) is the error of the form

where ŷ (K) = ̂T(K−1 ) Ø (K−1) is given by

5.3. Projection Algorithm
The projection algorithm raises an optimization problem where ̂(K) is being minimised with the (K−1) and y(K) given, such that

subject to

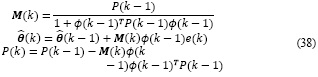
The projection algorithm is given by
- Least Squares Algorithm
The least squares algorithm is given by
5.4. Discrete Linear Quadratic Regulator
The formulation of the DLQR problem in the discrete-time case is analogous to the continuous-time LQR problem. Consider the time-invariant linear system described in (28) where the vector Ø(K−1) represents the variables to be regulated [11]. The DLQR problem is to determine a control sequence {u*(K)},K≥0, which minimizes the cost function

where the weighting matrices Q and R are real symmetric and positive definite.
Assume that (E,F,Q1/2Me) is reachable and observable. Then the solution to the DLQR problem is given by the linear state feedback control law

where P*c is the unique, symmetric, and positive-definite solution of the (discrete-time) algebraic Riccati equation, given by

As in the continuous-time case, it can be shown that the solution P*c can be determined from the eigenvectors of the Hamiltonian matrix, which in this case is

The linear state feedback control law can be extended for reference tracking performance as follows

being r (K) a reference vector and Kg a steady state matrix gain or reference gain defined by

being (Me(I − E+ FK)# the pseudoinverse of (Me(I−E+FK)−1F).
6. Results
The proposed model of PMSG is constructed with MATLAB/Simulink using the parameters of Tables 1, 2 and 3.
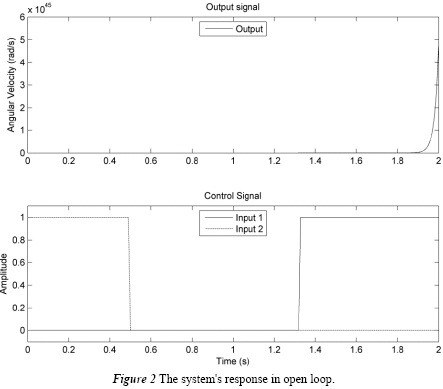
This section presents the simulated responses of the system with a variable wind speed from 5m/s to 12 m/s and a time varying load.
The open loop response of the wind turbine is shown in Figure 2.
By applying the online identification scheme, a discrete linear model of the PMSG is obtained. Estimated model is represented in state space as shown in (45)
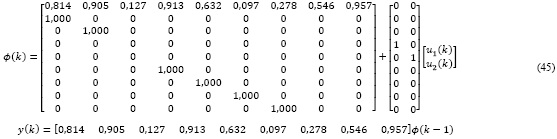
with

and

being

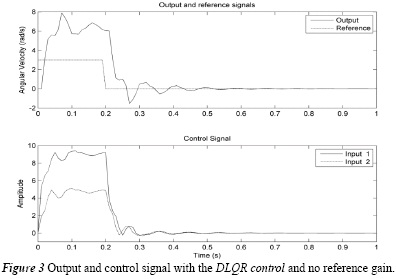
Figure 3 shown the system's regulation with the DLQR control: K as feedback gain but without Kg as reference gain, the values are the same that is previously used. Output signal has a steady state time around the 0.3s after changing the reference value, an overshoot around the 6 rad/s and an oscillatory response before reaching the steady state.
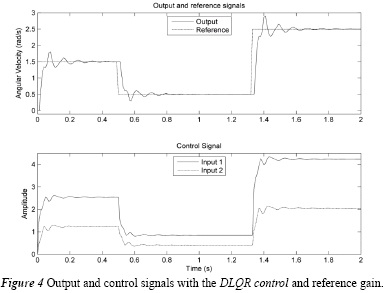
The system's response using the DLQR control is shown in Figure 4 with K as feedback gain and Kg as reference gain, in equations (46) and (47), respectively. In Figure 4, the system has a steady state time around the 0.5 s, an overshoot around the 0.3rad/s and the output signals follows the references.
7. Conclusions
The identification methods of state variables with least squares and projection algorithms, where the observer of states is included, allows a better estimation the linear model in state space of a multivariable discrete system. With a adequate estimation of the system, control strategies can be used where the controller adapts to changes response to any disturbance reference, at each instant time.
The work developed shows that a satisfactory performance of control algorithms depends of the performance of identification algorithms. The steady state time and overshoot of output signal, can be changed depending of the performance of the control algorithms or non-following reference output signal (steady-state error).
Acknowledgment
This paper was developed under the research project "Identificación de sistemas multivariables aplicada a generadores eólicos" funded by the Universidad Tecnológica de Pereira with code "6-14-1", and the MSc. thesis "Control óptimo de un sistema multi-variable aplicado a un generador eólico conectado a un sistema de potencia" approved by the "Convocatoria para financiar proyectos de grado de estudiantes de pregrado y posgrado año 2103" funded by the Universidad Tecnológica de Pereira with code "E6-14-6".
References
[1] A. Rolán, A. Luna, G. Vázquez, D. Aguilar y G. Azevedo, «Modeling of a Variable Speed Wind Turbine with a Permanent Magnet Synchronous Generator,» de International Symposium on Industrial Electronics, 2009. [ Links ]
[2] N. Kodama, T. Matsuzaka y N. Inomata, «Power Variations of A Wind Turbine Generator Connecting to Power System",» de Proceedings of the 41st SICE Annual Conference SICE, 2002. [ Links ]
[3] V. Verma y S. Tanton, « Disturbance Immune DFIG based Wind Energy Conversion System,» de International Conference on Power, Energy and Control (ICPEC), 2013. [ Links ]
[4] R. Shi y J. MacGregor, «A Framework for Subspace Identifications Methods,» de proceedings of the American Control Conference, 2001, pp. 3678 - 3683, 2001. [ Links ]
[5] W. Larimore, «Canonical Variate Analysis for System Identification, Filtering and Adaptive Control,» de 29th IEEE Conference on Decision and Control, 1990, Honolulu, 1990. [ Links ]
[6] W. Jamaludin, N. Wahab, S. Sahlan, Z. Ibrahim y F. and Rahmat, «N4SID and MOESP Subspace Identification Methods,» de 9th International Colloquium on Signal Precessing ans its Applications, Kuala Lumpur, 2013. [ Links ]
[7] D. Giraldo y E. Giraldo, «A Multlivariable Approach for Adaptive System Estimation,» 2007. [ Links ]
[8] J. V. da Fonseca Neto y L. R. Lopes, «On the Convergence of DLQR Control System Design and Recurrences of Riccati and Lyapunov in Dynamic Programming Strategies,» de Computer Modelling and Simulation (UKSim), 2011 UkSim 13th International Conference, Cambridge, 2011. [ Links ]
[9] S. Sanchez, M. Bueno, E. Delgado y E. Giraldo, «Optimal PI Control of a Wind Energy Conversion System Using Particles Swarm,» de Electronics, Robotics and Automotive Mechanics Conference, 2009. CERMA '09., Cuernavaca, Morelos, 2009. [ Links ]
[10] M. Yin, G. Li, M. Zhou y C. Zhao, «Modeling of the Wind Turbine with a Permanent Magnet Synchronous Generator for Integration,» de Power Engineering Society General Meeting, 2007. IEEE, Tampa, Florida, 2007. [ Links ]
[11] D. Albarracín-Ávila y E. Giraldo, «Adaptive Optimal Multivariable Control of a Permanent Magnet Synchronous Generator,» de 2014 IEEE PES Transmision and Distribution Conference and Exposition, 2014. [ Links ]
[12] P. Antsaklis y A. Michel, Linear Systems, New York: McGraw- Hill, 1997. [ Links ]
